机器人手臂运动结构
1.本实用新型涉及机器人技术领域,具体为机器人手臂运动结构。
背景技术:
2.随着人们教育水平的不断提高,越来越少人愿意从事低技术、低附加值的服务业,如迎宾、咨询、接待等工作;机器人的发展已经不仅仅局限于早期的工业机器人,服务机器人的发展是现阶段的一个趋势。服务机器人的发展为人类带来了更方便、更舒适的服务。因全球人口老龄化的加剧,服务型机器人的市场广阔,服务机器人也逐步成为研究应用的一个热点。随着机器人技术的快速发展,人们对于机器人的功能要求一再增加,不再满足于传统的笨拙概念。为此,机器人的仿生性能逐渐变得重要,以高度模拟人类或动物的关节活动动作。目前,现有技术中的机器人手臂较为笨拙,不方便进行多方位调节,而且调节处的连接稳定性较差。
3.在中国实用新型专利申请公开说明书cn 207983352 u中公开的一种机器人手臂结构,虽然该实用新型方便精准定位,但是该实用新型不方便多方位调节,而且该实用新型调节处的连接稳定性较差,该实用新型,存在不方便多方位调节和连接稳定性较差的缺点。
技术实现要素:
4.(一)解决的技术问题
5.针对现有技术的不足,本实用新型提供了机器人手臂运动结构,解决了上述背景技术中提出的问题。
6.(二)技术方案
7.为实现以上目的,本实用新型通过以下技术方案予以实现:机器人手臂运动结构,包括大臂,所述大臂的底部固定连接有电机箱,所述电机箱的内部设置有第一伺服电机,所述第一伺服电机的输出端固定连接有主动齿轮,所述主动齿轮通过齿牙啮合有从动齿轮,所述从动齿轮通过齿牙啮合有配合齿轮,所述电机箱的一侧面固定离接有连接块,所述连接块通过轴杆转动连接有u型块,所述u型块的内侧壁固定连接有支杆,所述大臂的顶部固定连接有连接齿轮,所述连接齿轮通过齿牙啮合有调节齿轮,所述连接齿轮的顶部连接有连杆,所述大臂的外表面开设有环形槽,所述环形槽的内部插接有环形块,所述环形块的外表面固定连接有圆筒,所述圆筒的顶部固定连接有转接块,所述转接块的通过轴杆铰接有挡板,所述转接块的一侧面开设有凸型槽,所述凸型槽的内部滑动连接有凸型块,所述凸型块通过轴杆铰接有电动推杆的活动端。
8.可选的,所述配合齿轮固定连接在支杆的外表面,所述从动齿轮通过轴杆与连接块转动连接。
9.可选的,所述u型块的底部固定连接有小臂,所述大臂的横截面为圆形,所述圆筒套接在大臂的外部。
10.可选的,所述圆筒的内顶壁固定连接有第二伺服电机,所述第二伺服电机的输出
端与调节齿轮固定连接。
11.可选的,所述挡板的一侧面固定连接有连接箱,所述连接箱的内部开设有卡槽,所述电动推杆固定连接在卡槽的内部。
12.可选的,所述连杆通过轴承与圆筒转动连接,所述第一伺服电机、第二伺服电机和电动推杆均通过导线与外部电源电性连接。
13.(三)有益效果
14.本实用新型提供了机器人手臂运动结构,具备以下有益效果:
15.1、该机器人手臂运动结构,通过主动齿轮、从动齿轮、配合齿轮、连接齿轮、配合齿轮和凸型块的设置,使该机器人手臂运动结构具备了方便多方位调节的效果,在使用的过程中第一伺服电机转动,主动齿轮与从动齿轮啮合,从动齿轮与配合齿轮啮合,方便使小臂弯曲,第二伺服电机转动,调节齿轮与连接齿轮啮合,方便使大臂转动,电动推杆的活动端伸出,凸型块在凸型槽的内部移动,方便使大臂弯曲,从而起到了方便多方位调节的作用,达到了方便多方位调节的目的。
16.2、该机器人手臂运动结构,通过连接块、u型块、圆筒、连杆、环形块和挡板的设置,使该机器人手臂运动结构具备了提高调节处连接稳定性的效果,在使用的过程中连接块与u型块通过轴杆转动连接,圆筒、环形块和连杆起到转动连接大臂的作用,挡板与转接块转动连接,从而起到了提高调节处连接稳定性的作用,达到了提高调节处连接稳定性的目的。
附图说明
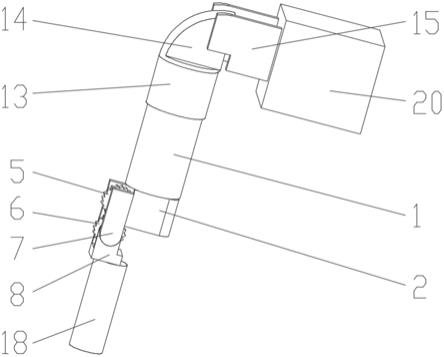
17.图1为本实用新型立体结构示意图;
18.图2为本实用新型侧视剖面的结构示意图;
19.图3为本实用新型正视剖面的结构示意图;
20.图4为本实用新型图3中a处放大的结构示意图。
21.图中:1、大臂;2、电机箱;3、第一伺服电机;4、主动齿轮;5、从动齿轮;6、配合齿轮;7、连接块;8、u型块;9、支杆;10、连接齿轮;11、调节齿轮;12、环形块;13、圆筒;14、转接块;15、挡板;16、凸型块;17、电动推杆;18、小臂;19、第二伺服电机;20、连接箱;21、连杆。
具体实施方式
22.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
23.请参阅图1至图4,本实用新型提供技术方案:机器人手臂运动结构,包括大臂1,大臂1的底部固定连接有电机箱2,电机箱2的内部设置有第一伺服电机3,第一伺服电机3的输出端固定连接有主动齿轮4,通过主动齿轮4、从动齿轮5、配合齿轮6、连接齿轮10、配合齿轮6和凸型块16的设置,使该机器人手臂运动结构具备了方便多方位调节的效果,在使用的过程中第一伺服电机3转动,主动齿轮4与从动齿轮5啮合,从动齿轮5与配合齿轮6啮合,方便使小臂18弯曲,第二伺服电机19转动,调节齿轮11与连接齿轮10啮合,方便使大臂1转动,电动推杆17的活动端伸出,凸型块16在凸型槽的内部移动,方便使大臂1弯曲,从而起到了方便多方位调节的作用,达到了方便多方位调节的目的,主动齿轮4通过齿牙啮合有从动齿轮
5,从动齿轮5通过齿牙啮合有配合齿轮6,配合齿轮6固定连接在支杆9的外表面,从动齿轮5通过轴杆与连接块7转动连接,电机箱2的一侧面固定离接有连接块7,通过连接块7、u型块8、圆筒13、连杆21、环形块12和挡板15的设置,使该机器人手臂运动结构具备了提高调节处连接稳定性的效果,在使用的过程中连接块7与u型块8通过轴杆转动连接,圆筒13、环形块12和连杆21起到转动连接大臂1的作用,挡板15与转接块14转动连接,从而起到了提高调节处连接稳定性的作用,达到了提高调节处连接稳定性的目的,连接块7通过轴杆转动连接有u型块8,u型块8的底部固定连接有小臂18,大臂1的横截面为圆形,圆筒13套接在大臂1的外部,u型块8的内侧壁固定连接有支杆9,大臂1的顶部固定连接有连接齿轮10,连接齿轮10通过齿牙啮合有调节齿轮11,连接齿轮10的顶部连接有连杆21,连杆21通过轴承与圆筒13转动连接,第一伺服电机3、第二伺服电机19和电动推杆17均通过导线与外部电源电性连接,大臂1的外表面开设有环形槽,环形槽的内部插接有环形块12,环形块12的外表面固定连接有圆筒13,圆筒13的内顶壁固定连接有第二伺服电机19,第二伺服电机19的输出端与调节齿轮11固定连接,圆筒13的顶部固定连接有转接块14,转接块14的通过轴杆铰接有挡板15,挡板15的一侧面固定连接有连接箱20,连接箱20的内部开设有卡槽,电动推杆17固定连接在卡槽的内部,转接块14的一侧面开设有凸型槽,凸型槽的内部滑动连接有凸型块16,凸型块16通过轴杆铰接有电动推杆17的活动端。
24.使用时,第一伺服电机3转动,主动齿轮4与从动齿轮5啮合,从动齿轮5与配合齿轮6啮合,方便使小臂18在一定范围内弯曲,第二伺服电机19转动,调节齿轮11与连接齿轮10啮合,使连杆21通过轴承转动,使环形块12在环形槽的内部转动,方便使大臂1转动,电动推杆17的活动端伸出,凸型块16在凸型槽的内部移动,挡板15与转接块14转动连接,方便使大臂1在一定范围内弯曲,连接块7和u型块8转动连接,圆筒13套接在大臂1的外部,环形块12在环形槽的内部,辅助大臂1转动,提高连接的稳定性。
25.综上,本实用新型通过主动齿轮4、从动齿轮5、配合齿轮6、连接齿轮10、配合齿轮6和凸型块16的设置,使该机器人手臂运动结构具备了方便多方位调节的效果,在使用的过程中第一伺服电机3转动,主动齿轮4与从动齿轮5啮合,从动齿轮5与配合齿轮6啮合,方便使小臂18弯曲,第二伺服电机19转动,调节齿轮11与连接齿轮10啮合,方便使大臂1转动,电动推杆17的活动端伸出,凸型块16在凸型槽的内部移动,方便使大臂1弯曲,从而起到了方便多方位调节的作用,达到了方便多方位调节的目的,通过连接块7、u型块8、圆筒13、连杆21、环形块12和挡板15的设置,使该机器人手臂运动结构具备了提高调节处连接稳定性的效果,在使用的过程中连接块7与u型块8通过轴杆转动连接,圆筒13、环形块12和连杆21起到转动连接大臂1的作用,挡板15与转接块14转动连接,从而起到了提高调节处连接稳定性的作用,达到了提高调节处连接稳定性的目的。
26.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1