平面四关节机械臂
1.本实用新型属智能设备技术领域,具体涉及一种平面四关节机械臂。
背景技术:
2.全scara是selective compliance assembly robot arm的缩写,意思是一种应用于装配作业的机器人手臂。它有3个旋转关节,最适用于平面定位。
3.由于传统的scara机器人,每一节手臂上都需要设置相关的运动组件来控制手臂绕相应的关节运动,导致每一节手臂的重量都较大,从而导致机械臂越靠近自由端运动时惯性越大。这样不仅限制了机械臂自由端的负载,也不利于机械臂作出快速灵活的动作。
技术实现要素:
4.为了解决上述问题,本实用新型提供了一种平面四关节机械臂,具体方案如下:
5.一种平面四关节机械臂,包括竖直布置于底座上的丝杠组件,所述丝杠组件上通过活动块设有机械臂组件,所述机械臂组件包括通过安装座与所述活动块连接的第一臂,所述第一臂通过第一轴铰接于所述安装座上;所述第一臂的末端通过第二轴铰接有第二臂,所述第二臂的末端通过第三轴铰接有用于连接工具的接口;所述第一轴、所述第二轴和所述第三轴均竖直布置;
6.所述安装座上还设有第一电机和第二电机,所述第一臂上设有第三电机;所述第一电机与所述第一轴传动连接用于驱动所述第一臂绕所述第一轴转动,所述第二电机与所述第二轴传动连接用于驱动所述第二臂绕所述第二轴转动,所述第三电机与所述第三轴传动连接用于驱动所述接口绕所述第三轴转动。
7.进一步地,所述安装座包括连接于所述活动块上的侧板,所述侧板的顶端连接有水平布置的顶板,所述侧板的底端连接有水平布置的底板;
8.所述侧板的两侧各连接有一块安装板,所述安装板上通过直线轴承设有竖直布置的导向杆,所述导向杆的底端通过轴座连接于所述底座上。
9.进一步地,所述第一臂包括水平布置的上板和下板,所述上板和所述下板通过两侧的侧板固定连接;所述下板通过第一交叉滚子轴承连接于所述底板上,所述上板通过位置与所述第一交叉滚子轴承位置对应的第二交叉滚子轴承连接于所述顶板上,所述第一交叉滚子轴承和所述第二交叉滚子轴承的中心轴的连线即构成所述第一轴;
10.所述第一交叉滚子轴承与所述下板之间设有同轴布置的第一齿轮,所述第一电机竖直设于所述底板上,所述第一电机的输出端与所述第一齿轮之间套设有第一传动带。
11.进一步地,所述上板的长度大于所述下板的长度,所述第二臂通过第三滚子轴承连接于所述上板的末端,所述第三滚子轴承的中心轴即构成所述第二轴;
12.所述第二交叉滚子轴承与所述上板之间设有同轴布置的第二齿轮和第三齿轮,所述第二电机竖直设于所述底板上,所述第二电机的输出端与所述第二齿轮之间套设有第二传动带;所述第三滚子轴承的上方设有同轴布置的第四齿轮,所述第四齿轮与所述第三齿
轮之间套设有第三传动带。
13.进一步地,所述接口通过第四滚子轴承连接于所述第二臂的末端,所述第四滚子轴承的中心轴即构成所述第三轴;
14.所述第三交叉滚子轴承与所述第二臂之间设有同轴布置的第五齿轮和第六齿轮,所述第三电机设于所述上板的底面上,所述第三电机的输出端与所述第五齿轮之间套设有第四传动带;所述第四滚子轴承的上方设有同轴布置的第七齿轮,所述第七齿轮与所述第六齿轮之间套设有第四传动带。
15.进一步地,所述接口包括通过轴套连接于所述第四滚子轴承下方的连接法兰,所述连接法兰上设有若干连接孔。
16.进一步地,所述丝杠组件通过连接板连接于所述底座上,所述连接板上还设有丝杠电机和电控箱。
17.本实用新型的有益效果在于:本实用新型提供了一种平面四关节机械臂,相比传统设计,减轻了机械臂的重量,最大限度的减轻了机械臂运动时产生的转动惯量,使机械臂可以承受更大负载,也进一步提高了机械臂的运动速度和灵活性。
附图说明
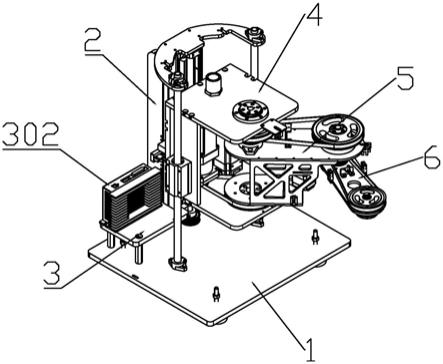
18.图1.本实用新型的结构立体图,
19.图2.本实用新型的结构俯视图,
20.图3.本实用新型的结构主视图,
21.图4.本实用新型安装座的结构示意图,
22.图5.本实用新型第一臂与安装座的连接立体图,
23.图6.本实用新型第一臂与安装座的连接主视图,
24.图7.本实用新型机械臂组件与安装座的连接立体图(不带顶板);
25.图8.本实用新型机械臂组件与安装座的连接主视图(不带顶板);
26.图9.本实用新型接口与第二臂的连接示意图。
27.附图序号及名称:1、底座,2、丝杠组件,3、连接板,301、丝杠电机,302、电控箱,4、安装座,401、侧板,402、顶板,403、底板,404、安装板,405、直线轴承,406、导向杆,5、第一臂,501、上班,502、下板,503、侧板,504、第一交叉滚子轴承,505、第二交叉滚子轴承,506、第一齿轮,507、第一传动带,6、第二臂,601、第三滚子轴承,602、第二齿轮,603、第三齿轮,604、第二传动带,605、第四齿轮,606、第三传动带,7、接口,701、第四滚子轴承,702、第五齿轮,703、第六齿轮,704、第四传动带,705、第七齿轮,706、第四传动带,707、连接法兰,8、第一电机,9、第二电机,10、第三电机。
具体实施方式
28.下面结合附图和实施例对本实用新型作进一步的描述,下列实施例仅用于解释本实用新型的实用新型内容,不用于限定本实用新型的保护范围。
29.结合图1
‑
图3,一种平面四关节机械臂,包括竖直布置于底座1上的丝杠组件2,丝杠组件2通过连接板3连接于底座1上,连接板3上还设有丝杠电机301和电控箱302。丝杠组件2上通过活动块设有机械臂组件,机械臂组件包括通过安装座4与活动块连接的第一臂5,
第一臂5通过第一轴铰接于安装座4上;第一臂5的末端通过第二轴铰接有第二臂6,第二臂6的末端通过第三轴铰接有用于连接工具的接口7,接口7包括通过轴套连接于第四滚子轴承701下方的连接法兰707,连接法兰707上设有若干连接孔(附图中未画出)作为通用接口可根据不同需求进行功能的个性化定制。
30.如图4,安装座4包括连接于活动块上的侧板401,侧板401的顶端连接有水平布置的顶板402,侧板401的底端连接有水平布置的底板403;侧板401的两侧各连接有一块安装板404,安装板404上通过直线轴承405设有竖直布置的导向杆406,导向杆406的底端通过轴座连接于底座1上。
31.如图5和图6所示,第一臂5包括水平布置的上板501和下板502,上板501和下板502通过两侧的侧板503固定连接(实际应用中为了进一步减少第一臂的重量,侧板上开设有若干减重孔);下板502通过第一交叉滚子轴承504连接于底板403上,上板501通过位置与第一交叉滚子轴承504位置对应的第二交叉滚子轴承505连接于顶板402上,第一交叉滚子轴承504和第二交叉滚子轴承505的中心轴的连线即构成第一轴;
32.第一交叉滚子轴承504与下板502之间设有同轴布置的第一齿轮506,第一电机8竖直设于底板403上,第一电机8的输出端与第一齿轮506之间套设有第一传动带507。
33.结合图7和图8,上板501的长度大于下板502的长度,第二臂6通过第三滚子轴承601连接于上板501的末端,第三滚子轴承601的中心轴即构成第二轴;
34.第二交叉滚子轴承505与上板501之间设有同轴布置的第二齿轮602和第三齿轮603,第二电机9竖直设于底板403上,第二电机9的输出端与第二齿轮602之间套设有第二传动带604;第三滚子轴承601的上方设有同轴布置的第四齿轮605,第四齿轮605与第三齿轮603之间套设有第三传动带606。
35.如图9所示,连接法兰707通过第四滚子轴承701连接于第二臂6的末端,第四滚子轴承701的中心轴即构成第三轴;
36.第三交叉滚子轴承601与第二臂6之间设有同轴布置的第五齿轮702和第六齿轮703,第三电机10设于上板501的底面上,第三电机10的输出端与第五齿轮702之间套设有第四传动带704;第四滚子轴承701的上方设有同轴布置的第七齿轮705,第七齿轮705与第六齿轮703之间套设有第四传动带706。
37.本技术的工作原理如下:
38.第一电机8的正反转,可以带动第一臂5绕第一轴转动;
39.第二电机9的正反转,可以带动第二齿轮602转动,第二齿轮602下方的第三齿轮603同步转动,进而带动第四齿轮605转动,即带动第二臂6绕第二轴转动;
40.第三电机10的正反转,可以带动第五齿轮702转动,第五齿轮702下方的第六齿轮703同步转动,进而带动第七齿轮705转动,即带动接口7绕第三轴转动。
41.本技术将和第一轴和第二轴的驱动电机集成在底座中,相比传统scara设计,机器人的手臂和末端结构更简单稳定,手臂关节的重量更低,机器人的转动惯量更小,机器人便于达到更高的工作速度,机器人整体的灵活度大幅提高。
42.综上,仅为本实用新型之较佳实施例,不以此限定本实用新型的保护范围,凡依本实用新型专利范围及说明书内容所作的等效变化与修饰,皆为本实用新型专利涵盖的范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1