一种压力测量系统、足部结构及机器人的制作方法
1.本技术属于机器人技术领域,尤其涉及一种压力测量系统、足部结构及机器人。
背景技术:
2.机器人脚底的薄膜压力传感器可以有效测量机器人脚底的受力情况,用于准确判断机器人的运动状态(例如,站立、行走或跑动),为机器人的姿态和运动控制提供参考数据,帮助机器人获得优秀的运动控制性能。现有的六维力传感器存在体积大,成本高等缺点,无法在小型机器人产品上进行应用;应变片式压力传感器,阻值变化范围小,分辨率差,且测量电路复杂,难以适应宽应力范围的应用。
技术实现要素:
3.本技术实施例提供了一种压力测量系统、足部结构及机器人,以解决现有的六维力传感器存在体积大,成本高等缺点,无法在小型机器人产品上进行应用;应变片式压力传感器,阻值变化范围小,分辨率差,且测量电路复杂,难以适应宽应力范围的应用的问题。
4.本技术实施例的第一方面提供一种压力测量系统,包括处理器、多个信号放大电路和多个薄膜压力传感器;
5.所述处理器分别与所述多个信号放大电路电连接,每个所述信号放大电路与一个所述薄膜压力传感器对应电连接,所述多个薄膜压力传感器均匀分布于机器人的足底;
6.所述薄膜压力传感器被配置为响应于所述足底的压力变化,改变自身的阻值;
7.所述信号放大电路被配置为响应于对应的薄膜压力传感器的阻值变化,输出相应的电压信号至所述处理器;
8.所述处理器被配置为根据所述多个信号放大电路输出的电压信号,获得所述足底的压力大小。
9.在一个实施例中,所述信号放大电路包括运算放大器、第一电阻单元、第二电阻单元和第三电阻单元;
10.所述运算放大器的同相输入端与所述第一电阻单元的第一端电连接,所述运算放大器的反向输入端与一个所述薄膜压力传感器的输出端和所述第三电阻单元的第一端电连接,所述运算放大器的正电源端接入参考电压源,所述运算放大器的负电源端接地,所述运算放大器的输出端与所述处理器和所述第三电阻单元的第二端电连接;
11.所述第一电阻单元的第二端与所述第二电阻单元的第一端电连接;
12.所述第二电阻单元的第二端接地。
13.在一个实施例中,所述信号放大电路还包括滤波单元;
14.所述滤波单元电连接在所述运算放大器的输出端和所述处理器之间。
15.在一个实施例中,所述滤波单元包括第四电阻单元和第一电容单元;
16.所述第四电阻单元的第一端与所述运算放大器的输出端电连接,所述第四电阻单元的第二端与所述第一电容单元的输入端和所述处理器电连接;
17.所述第一电容单元的输出端接地。
18.在一个实施例中,所述信号放大电路还包括第二电容单元和第三电容单元;
19.所述第二电容单元电连接在所述运算放大器的反向输入端和输出端之间;
20.所述第三电容单元电连接在所述运算放大器的正电源端和地之间。
21.在一个实施例中,所述压力测量系统还包括电源接口和通讯接口;
22.所述电源接口分别与所述处理器和所述多个信号放大电路电连接;
23.所述通讯接口与所述处理器电连接;
24.所述电源接口被配置为电连接外部电源为所述处理器提供工作电源以及为所述信号放大电路提供参考电压源;
25.所述通讯接口被配置为电连接外部器件。
26.本技术实施例的第二方面提供一种足部结构,包括足底板、板卡以及如本技术实施例的第一方面所述的压力测量系统;
27.所述板卡设置于所述足底板,所述处理器和所述信号放大电路设置于所述板卡,所述多个薄膜压力传感器均匀分布于所述足底板,每个所述薄膜压力传感器通过一条排线与所述板卡电连接。
28.在一个实施例中,所述足部结构还包括支撑架;
29.所述支撑架设置于所述足底板,所述多个薄膜压力传感器均匀分布于所述支撑架与所述足底板之间,所述薄膜压力传感器与所述支撑架之间以及所述支撑架与所述足底板之间填充有弹性部件。
30.在一个实施例中,所述压力测量系统包括四个薄膜压力传感器,所述四个薄膜压力传感器均匀分布于所述足底板的四个不同方位。
31.本技术实施例的第三方面提供一种机器人,包括多个如本技术实施例的第二方面所述的足部结构。
32.本技术实施例的第一方面提供的压力测量系统,包括处理器、多个信号放大电路和多个薄膜压力传感器;处理器分别与多个信号放大电路电连接,每个信号放大电路与一个薄膜压力传感器对应电连接,多个薄膜压力传感器均匀分布于机器人的足底;薄膜压力传感器被配置为响应于足底的压力变化,改变自身的阻值;信号放大电路被配置为响应于对应的薄膜压力传感器的阻值变化,输出相应的电压信号至处理器;处理器被配置为根据多个信号放大电路输出的电压信号,获得足底的压力大小,体积小,成本低,可以在小型的机器人产品上进行应用,阻值变化范围大,分辨率高,且测量电路简单可靠,可以适应宽应力范围的应用。
33.可以理解的是,上述第二方面和第三方面的有益效果可以参见上述第一方面中的相关描述,在此不再赘述。
附图说明
34.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
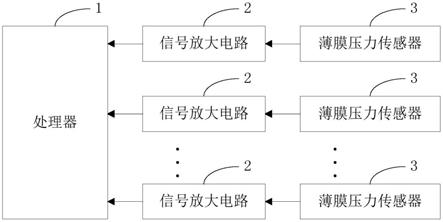
35.图1是本技术实施例提供的压力测量系统的结构示意图;
36.图2是本技术实施例提供的薄膜压力传感器的电导与薄膜压力传感器受到的压力之间的关联关系示意图;
37.图3是本技术实施例提供的信号放大电路的电路结构示意图;
38.图4是本技术实施例提供的足部结构的剖示图;
39.图5是本技术实施例提供的足部结构的透视图。
具体实施方式
40.以下描述中,为了说明而不是为了限定,提出了诸如特定系统结构、技术之类的具体细节,以便透彻理解本技术实施例。然而,本领域的技术人员应当清楚,在没有这些具体细节的其它实施例中也可以实现本技术。在其它情况中,省略对众所周知的系统、装置、电路以及方法的详细说明,以免不必要的细节妨碍本技术的描述。
41.另外,在本技术说明书和所附权利要求书的描述中,术语“第一”、“第二”、“第三”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
42.在本技术说明书中描述的参考“一个实施例”或“一些实施例”等意味着在本技术的一个或多个实施例中包括结合该实施例描述的特定特征、结构或特点。由此,在本说明书中的不同之处出现的语句“在一个实施例中”、“在一些实施例中”、“在其他一些实施例中”、“在另外一些实施例中”等不是必然都参考相同的实施例,而是意味着“一个或多个但不是所有的实施例”,除非是以其他方式另外特别强调。术语“包括”、“包含”、“具有”及它们的变形都意味着“包括但不限于”,除非是以其他方式另外特别强调。“多个”是指“两个及两个以上”43.本技术实施例提供一种压力测量系统,应用于具有行走功能的任意类型的机器人,用于通过均匀分布于机器人的足底的多个薄膜压力传感器,来测量机器人的足底的压力大小,体积小,成本低,可以在小型的机器人产品上进行应用,阻值变化范围大,分辨率高,且测量电路简单可靠,可以适应宽应力范围的应用。
44.在应用中,服务机器人、娱乐机器人、生产机器人、农业机器人等各种类型的机器人中都存在具有行走功能的机器人类型,例如,仿生教育机器人、仿生迎宾机器人、仿生跳舞机器人、仿生保姆机器人等。
45.如图1所示,本技术实施例提供的压力测量系统包括处理器1、多个信号放大电路2和多个薄膜压力传感器3;
46.处理器1分别与多个信号放大电路2电连接,每个信号放大电路2与一个薄膜压力传感器3对应电连接,多个薄膜压力传感器3均匀分布于机器人的足底(图1中未示出);
47.薄膜压力传感器3被配置为响应于足底的压力变化,改变自身的阻值;
48.信号放大电路2被配置为响应于对应的薄膜压力传感器2的阻值变化,输出相应的电压信号至处理器1;
49.处理器1被配置为根据多个信号放大电路2输出的电压信号,获得足底的压力大小。
50.在应用中,处理器可以是中央处理单元(central processing unit,cpu),该处理器还可以是其他通用处理器、数字信号处理器(digital signal processor,dsp)、专用集
成电路(application specific integrated circuit,asic)、现场可编程门阵列(field-programmable gate array,fpga)或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件等。通用处理器可以是微处理器或者该处理器也可以是任何常规的处理器等。
51.在应用中,信号放大电路可以通过运算放大器及其外围电子元器件实现,运算放大器可以是高精度的精密运算放大器。
52.在应用中,可以根据机器人在实际运动过程,其足底受到的压力的变化范围,选择具有对应的压力感应范围和阻值范围的薄膜压力传感器,例如,薄膜压力传感器的阻值范围可以为0欧姆(ω)~10兆欧姆(mω)。薄膜压力传感器的数量可以根据实际需要进行设置,具有可以根据机器人的足底的面积或形状进行设置,例如,薄膜压力传感器的数量可以与机器人的足底的面积大小正相关,或者,当机器人的足底的形状为矩形或类矩形时,薄膜压力传感器的数量至少为四个,四个薄膜压力传感器分别设置于机器人的足底的四个方位角,或者,当机器人的足底的形状为人的脚掌状时,薄膜压力传感器的数量至少为六个,六个薄膜压力传感器分别设置于五个脚趾和足跟。
53.在应用中,机器人处于站立、行走或跑到等任意运动状态时,其足底都会受到来自外部的压力,当机器人的足部未受任何压力时,其足底的压力为0。薄膜压力传感器响应于机器人的足底的压力变化,来改变自身的阻值,从而使得信号放大电路响应于与其对应电连接的薄膜压力传感器的阻值变化,输出具有相应电压大小的电压信号至处理器,进而使得处理器根据所有信号放大电路输出的电压信号的电压大小,计算获得机器人的足底受到的压力大小,机器人的足底受到的压力大小,可以用于准确判断机器人的运动状态,为机器人的姿态和运动控制提供参考数据,帮助机器人获得优秀的运动控制性能。
54.在一个实施例中,处理器具体被配置为:
55.首先,采集每个信号放大器输出的电压信号并进行模数转换,获得每个信号放大器输出的电压信号的电压大小;
56.然后,根据每个信号放大器输出的电压信号的电压大小结合每个信号放大电路中的各电子元器件的特性参数,计算得到每个薄膜压力传感器的电导;
57.最后,根据所有薄膜压力传感器的电导的平均值和预设关联关系,获得机器人的足底的压力大小,预设关联关系为机器人的足底的压力大小与所有薄膜压力传感器的电导的平均值之间的关联关系。
58.在应用中,处理器可以是具有模数转换功能的处理器,在处理器不具备模数转换功能时,可以在所有信号放大电路和处理器之间电连接一个多输入单输出的模数转换器,或者,在每个信号放大电路和处理器之间电连接一个单输入单输出的模数转换器。
59.在应用中,薄膜压力传感器的的电阻特性的线性度较差,但是其电导特性的线性度较好,通过对薄膜压力传感器在不同压力下的电导特性进行线性拟合,可以获得施加于薄膜压力传感器的压力及其电导之间的关联关系。由于施加至机器人的足底的压力与施加至薄膜压力传感器的压力相等,因此,该关联关系也是机器人的足底的压力大小与薄膜压力传感器的电导之间的关联关系。通过在机器人的足底设置多个薄膜压力传感器,并获得机器人的足底的压力大小与所有薄膜压力传感器的电导的平均值之间的关联关系,然后在机器人的实际运动过程中,基于该关联关系和所有薄膜压力传感器的电导的平均值,获得
更为准确的机器人的足底的压力大小,从而提高压力测量精度。
60.在一个实施例中,处理器具体被配置为:
61.在机器人的足底被施加预设压力时,根据每个信号放大器输出的电压信号,获得对应的每个薄膜压力传感器在预设压力下的电导;
62.对所有薄膜压力传感器在多个不同的预设压力下的电导的平均值和多个不同的预设压力之间的关联关系,获得预设关联关系。
63.在应用中,由于所有薄膜压力传感器是均匀分布于机器人的足底,因此,当机器人的足底被施加压力时,所有薄膜压力传感器受到的压力可以看作是相同,但是由于不同的薄膜压力传感器受到的压力可能不同,不同薄膜压力传感器之间也可能存在一定的测量误差,因此,在获得所有薄膜压力传感器的电导之后,可以求所有薄膜压力传感器的电导的平均值,然后根据该平均值来获得所有薄膜压力传感器在预设压力下的电导的平均值和预设压力之间的关联关系。
64.在应用中,可以将所有薄膜压力传感器在一种预设压力下的电导的平均值和预设压力之间的关联关系,作为预设关联关系,在机器人的实际运动过程中,可以基于该预设关联关系和所有薄膜压力传感器的电导的平均值,获得较为精确的机器人的足底的压力大小。
65.在应用中,为了进一步提高机器人的足底的压力的测量精度,可以对所有薄膜压力传感器在多个不同的预设压力下的电导的平均值和多个不同的预设压力进行线性拟合,获得预设关联关系,该预设关联关系满足所有薄膜压力传感器在每个预设压力下的电导的平均值和每个预设压力之间的关联关系,也即根据该预设关联关系和所有薄膜压力传感器在每个预设压力下的电导的平均值,可以计算得到相应的每个预设压力,在机器人的实际运动过程中,可以基于该预设关联关系和所有薄膜压力传感器的电导的平均值,获得更为精确的机器人的足底的压力大小。
66.如图2所示,示例性的示出了单个薄膜压力传感器的电导与薄膜压力传感器受到的压力之间的关联关系;其中,横轴坐标为电导,纵轴坐标为压力,y=0.0035x+0.0007为该关联关系的表达式,y表示压力,x表示电导,0.0035和0.0007为对薄膜压力传感器在多个不同压力下的电导与多个不同压力进行线性拟合求解获得的常数。
67.如图3所示,在一个实施例中,信号放大电路2包括运算放大器u1、第一电阻单元、第二电阻单元和第三电阻单元;
68.运算放大器u1的同相输入端与第一电阻单元的第一端电连接,运算放大器u1的反向输入端与一个薄膜压力传感器2的输出端和第三电阻单元的第一端电连接,运算放大器u1的正电源端接入参考电压源vcc,运算放大器u1的负电源端接地,运算放大器u1的输出端与处理器的电压信号采集端force_a和第三电阻单元的第二端电连接;
69.第一电阻单元的第二端与第二电阻单元的第一端电连接;
70.第二电阻单元的第二端接地。
71.在应用中,第一电阻单元、第二电阻单元和第三电阻单元都可以通过一个电阻或串联的多个电阻实现。图3中示例性的示出第一电阻单元包括一个第一电阻r1、第二电阻单元包括一个第二电阻r2和第三电阻单元包括一个第三电阻r3。
72.如图3所示,在一个实施例中,信号放大电路2还包括滤波单元;
73.滤波单元电连接在运算放大器u1的输出端和处理器之间的电压信号采集端force_a。
74.在应用中,滤波单元可以是低通滤波单元,该低通滤波单元可以通过至少一个电阻和至少一个电容组成的l型或π型滤波电路实现。
75.在一个实施例中,滤波单元包括第四电阻单元和第一电容单元;
76.第四电阻单元的第一端与运算放大器的输出端电连接,第四电阻单元的第二端与第一电容单元的输入端和处理器电连接;
77.第一电容单元的输出端接地。
78.在应用中,第四电阻单元可以通过一个电阻或串联的多个电阻实现,第一电容单元可以通过一个电容或并联的多个电容实现。图3中示例性的示出第四电阻单元包括一个第四电阻r4,第一电容单元包括一个第一电容c1。
79.如图3所示,在一个实施例中,信号放大电路2还包括第二电容单元;
80.第二电容单元电连接在运算放大器u1的反向输入端和输出端之间。
81.在应用中,第二电容单元可以通过一个电容或并联的多个电容实现。第二电容单元为补偿电容单元,用于保持运算放大器的电压放大倍数处于较高水平,改变反馈网络的相移,补偿运算放大器的信号滞后。图3中示例性的示出第二电容单元包括一个第二电容c2。
82.如图3所示,在一个实施例中,信号放大电路2还包括第三电容单元;
83.第三电容单元电连接在运算放大器u1的正电源端和地之间。
84.在应用中,第三电容单元可以通过一个电容或并联的多个电容实现。第三电容单元为去耦电容单元,用于降低来自参考电压源的阻抗、电源噪声、增加运算放大器的稳定性。图3中示例性的示出第三电容单元包括一个第三电容c3。
85.在一个实施例中,基于上述任一实施例所提供的信号放大电路的具体电路结构,每个薄膜压力传感器输出的压力信号的电压大小的计算公式为:
86.vo=(1/rx+1/r3)*vcc*r2/(r1+r2)
87.其中,vo表示电压信号的电压大小,rx表示薄膜压力传感器的阻值,1/rx表示薄膜压力传感器的电导,r3表示第三电阻单元的阻值,vcc表示参考电压源的电压大小,r1表示第一电阻单元的阻值,r2表示第二电阻单元的阻值。
88.在应用中,基于信号放大电路的具体电路结构,处理器可以基于上述计算公式来计算每个薄膜压力传感器输出的压力信号的电压大小。
89.如图4或图5所示,在一个实施例中,压力测量系统还包括电源接口4和通讯接口5;
90.电源接口4分别与处理器1和多个信号放大电路2电连接;
91.通讯接口5与处理器1电连接;
92.电源接口4被配置为电连接外部电源为处理器1提供工作电源以及为信号放大电路2提供参考电压源;
93.通讯接口5被配置为电连接外部器件。
94.在应用中,外部电源可以是设置于板卡之外的机器人的电源,例如,设置于机器人的电池,具体可以为可充电锂电池;外部电源也可以是设置于机器人之外的外部电源,例如,市电交流电源、工频交流电源、发电机或电瓶等提供的交流或直流电源。外部器件具体
是指设置于板卡之外的机器人的其他器件,例如,机器人的显示屏、控制面板、语音器件、信号灯等。
95.如图4或图5所示,本技术实施例还提供一种足部结构,包括足底板101、板卡102以及上述的压力测量系统;
96.板卡102设置于足底板101的局部区域,处理器和信号放大电路设置于板卡102,多个薄膜压力传感器3均匀分布于足底板101,每个薄膜压力传感器3通过一条排线103与板卡102电连接。
97.在应用中,板卡可以根据实际需要集成设置于足底板的任意局部区域,以节省空间,缩小体积,也可以与足底板的形状相同且覆盖于足底板的全部区域,利于散热和生产制造。
98.在应用中,足底板的形状即为机器人的足底形状,参见前述实施例中的相关描述,此处不再赘述。图4和图5中示例性的示出压力测量系统包括四个薄膜压力传感器3,四个薄膜压力传感器3均匀分布于足底板101的四个不同方位。
99.如图4或图5所示,在一个实施例中,足部结构还包括支撑架104;
100.支撑架104设置于足底板101,多个薄膜压力传感器3均匀分布于支撑架104与足底板101之间,每个薄膜压力传感器3与支撑架104之间以及支撑架104与足底板101之间填充有弹性部件。
101.在应用中,弹性部件可以通过任意的不导电且柔软而富有弹性的材料制成,以使得薄膜压力传感器能够更好的接触足底板的受力面。
102.在应用中,机器人可包括,但不仅限于多个足部结构,上述实施例仅仅是机器人的举例,并不构成对机器人的限定,可以包括比上述实施例更多或更少的部件,或者组合某些部件,或者不同的部件,例如,还可以包括移动部件、输入输出设备、网络接入设备等。移动部件可以包括用于驱动机器人的关节移动的舵机、电机、驱动器等器件。输入输出设备可以包括前述人机交互器件,还可以包括显示屏,用于显示机器人的工作参数。网络接入设备可以包括通信模块,用于机器人与用户终端进行通信。
103.在应用中,显示屏可以为薄膜晶体管液晶显示屏(thin film transistor liquid crystal display,tft-lcd)、液晶显示屏(liquid crystal display,lcd)、有机电激光显示屏(organic electroluminesence display,oled)、量子点发光二极管(quantum dot light emitting diodes,qled)显示屏,七段或八段数码管等。
104.在应用中,通信模块可以根据实际需要设置为任意能够与客户端直接或间接进行远距离有线或无线通信的器件,例如,通信模块可以提供应用在网络设备上的包括无线局域网(wireless localarea networks,wlan)(如wi-fi网络),蓝牙,zigbee,移动通信网络,全球导航卫星系统(global navigation satellite system,gnss),调频(frequency modulation,fm),近距离无线通信技术(near field communication,nfc),红外技术(infrared,ir)等通信的解决方案。通信模块可以包括天线,天线可以只有一个阵元,也可以是包括多个阵元的天线阵列。通信模块可以通过天线接收电磁波,将电磁波信号调频以及滤波处理,将处理后的信号发送到处理器。通信模块还可以从处理器接收待发送的信号,对其进行调频、放大,经天线转为电磁波辐射出去。
105.在上述实施例中,对各个实施例的描述都各有侧重,某个实施例中没有详述或记
载的部分,可以参见其它实施例的相关描述。
106.以上所述实施例仅用以说明本技术的技术方案,而非对其限制;尽管参照前述实施例对本技术进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施例技术方案的精神和范围,均应包含在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1