多节式折叠型轨道机器人的制作方法
1.本技术涉及轨道机器人领域,尤其是涉及多节式折叠型轨道机器人。
背景技术:
2.火车走的轨道由两排工字型的钢轨共同组成,火车能够正常在两排钢轨上进行移动。
3.目前有一种轨道机器人,在两排钢轨上放好轨道机器人,然后启动轨道机器人,轨道机器人能够沿着钢轨进行移动,从而检查维修钢轨的使用情况。
4.针对上述中的相关技术,发明人认为,轨道机器人体积过大,使用前,不便于用户将其移动到钢轨位置处,使用后,不便于用户将其移动走,耗费人力。
技术实现要素:
5.为了改善轨道机器人体积过大的情况,便于用户对轨道机器人进行运送,本技术提供多节式折叠型轨道机器人。
6.本技术提供的多节式折叠型轨道机器人采用如下的技术方案:
7.一种多节式折叠型轨道机器人,包括两组移动架,每组移动架均包括连接块以及分别铰接于连接块两端的铰接架一和铰接架二,每个铰接架一和铰接架二分别固定连接有移动块一和移动块二,每个移动块一和移动块二底部均可拆卸连接有连接板,每个移动块一底部的连接板均连接有连接架一,每个移动块二底部的连接板均连接有连接架二,两个连接架一和两个连接架二之间均可拆卸连接有支撑杆一,每组移动架内的两个相对应的连接架一和连接架二之间均可拆卸连接有支撑杆二,每组移动架内的连接架一和另一组移动架内的连接架二之间均连接有转动杆,两个转动杆中间位置处相互铰接设置,每个移动块一和移动块二远离连接块一端均连接有支撑架,每个支撑架远离连接块一端均转动连接有滑动辊,每个支撑架底部均转动连接有多个限位辊。
8.通过采用上述技术方案,用户使用时,展开移动块一和移动块二,将两个转动杆的两端分别与对角设置的连接架一和连接架二连接好,连接好连接板和连接架一与移动块一,连接好连接板和连接架二与移动块二。在两个连接架一之间连接好支撑杆一,在两个连接架二之间连接好支撑杆一。在两组连接架一和连接架二之间连接好支撑杆二。然后将移动块一和移动块二放到钢轨上,滑动辊抵接于钢轨,限位辊抵接于工字型钢轨的凹槽处,保证移动块一和移动块二能够正常在钢轨上移动。检测完成后,将两个连接架一和两个连接架二分别从移动块一和移动块二上拆卸下来,将对角的连接架一和连接架二与支撑杆一、支撑杆二和转动杆分离,保证用户能够对支撑杆一和支撑杆二进行转动,并将两个支撑杆一、两个支撑杆二和两个转动杆聚集到一起,然后转动铰接架一和铰接架二,移动块一和移动块二分别随着铰接架一和铰接架二一同移动并靠近到一起,从而减小轨道机器人的体积,保证用户对轨道机器人进行移动时更加方便快捷。
9.可选的,每个所述支撑架靠近连接块一端均固定连接有限位板,每个移动块一和
移动块二对应限位板位置处均开设有限位槽,限位板插接于限位槽内,每个移动块一和移动块二对应限位槽位置处均螺纹连接有限位螺栓,限位螺栓螺纹连接于限位板并穿过限位板设置。
10.通过采用上述技术方案,用户使用时,将限位螺栓拧下来,将限位板和支撑架从移动块一的限位槽内取出,将限位板和支撑架从移动块二的限位槽内取出,保证用户能够方便快捷的对滑动辊和限位辊进行更换。
11.可选的,每个所述连接块顶部均连接有把手。
12.通过采用上述技术方案,用户使用时,拉动把手即可对连接块、移动块一和移动块二进行移动,节省人力,提高工作效率。
13.可选的,每个所述滑动辊远离连接块一侧均固定连接有橡胶垫片。
14.通过采用上述技术方案,用户使用时,将移动块一和移动块二抵接到一起后,橡胶垫片抵接于地面并和滑动辊一同支撑住移动块一和移动块二,橡胶垫片减少滑动辊与地面之间的相互磨损,延长滑动辊的使用寿命。
15.可选的,每个所述把手侧壁均固定连接有橡胶套。
16.通过采用上述技术方案,用户使用时,橡胶套增大人手和把手之间的摩擦力,减少用户的手与把手之间出现打滑的情况。
17.可选的,每个所述移动块一远离连接块位置处均固定连接有连接带,每个连接带均连接有卡接块,每个移动块二对应卡接块位置处均开设有卡接槽,卡接块能够卡接于卡接槽内。
18.通过采用上述技术方案,用户使用时,将连接带和卡接块穿过两个支撑架并卡接进移动块二的卡接槽内,保证用户移动移动块一和移动块二过程中两者不会自行展开。
19.可选的,每个所述移动块一均固定连接有开口环,每个开口环对应开口位置处分别固定连接有第一夹紧片和第二夹紧片,每个第一夹紧片和第二夹紧片均共同螺纹连接有夹紧螺栓,夹紧螺栓对应第一夹紧片远离第二夹紧片一侧螺纹连接有夹紧螺母,夹紧螺母能够抵接于第一夹紧片。
20.通过采用上述技术方案,用户使用时,在开口环内放好聚集到一起的支撑杆一、支撑杆二和转动杆,拧动夹紧螺栓开始转动,在夹紧螺母的作用下,使第一夹紧片和第二夹紧片靠近,保证开口环能够将支撑杆一、支撑杆二和转动杆夹紧,保证用户不必一直用手拿着支撑杆一、支撑杆二和转动杆,节省空间,节省人力。
21.可选的,每个所述开口环内壁均固定连接有橡胶条。
22.通过采用上述技术方案,用户使用时,橡胶条减少开口环与支撑杆一、支撑杆二和转动杆之间的相互磨损,延长支撑杆一、支撑杆二和转动杆的使用寿命。
23.综上所述,本技术包括以下至少一种有益技术效果:
24.1.连接板、连接架一、连接架二、支撑杆一、支撑杆二和转动杆,保证用户能够调整轨道机器人的体积,便于用户对轨道机器人进行运送;
25.2.限位板和限位螺栓的设计,保证用户更换滑动辊和限位辊时更加方便快捷;
26.3.开口环的设计,保证支撑杆一、支撑杆二和转动杆能够被开口环收集起来,节省人力。
附图说明
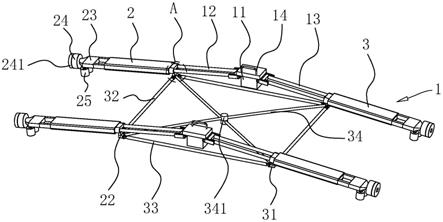
27.图1是本技术实施例一的整体结构示意图;
28.图2是图1中a部分的放大图;
29.图3是本技术实施例一的支撑杆一构造示意图;
30.图4是本技术实施例一的把手构造示意图;
31.图5是本技术实施例二的整体结构示意图;
32.图6是本技术实施例二的移动块一结构剖视图;
33.图7是本技术实施例二的开口环构造示意图。
34.附图标记说明:1、移动架;11、连接块;12、铰接架一;13、铰接架二;14、把手;141、橡胶套;2、移动块一;21、连接板;211、第一螺栓;22、连接架一;23、支撑架;231、限位板;232、限位螺栓;24、滑动辊;241、橡胶垫片;25、限位辊;3、移动块二;31、连接架二;32、支撑杆一;321、第二螺栓;33、支撑杆二;331、第三螺栓;34、转动杆;341、转动块;35、限位槽;4、连接带;41、卡接块;42、卡接槽;5、开口环;51、第一夹紧片;52、第二夹紧片;53、夹紧螺栓;54、夹紧螺母;55、橡胶条。
具体实施方式
35.以下结合附图1
‑
7对本技术作进一步详细说明。
36.本技术实施例公开一种多节式折叠型轨道机器人。
37.实施例1:参照图1,包括两组移动架1,每组移动架1均包括连接块11,每个连接块11两端分别铰接有铰接架一12和铰接架二13,每个铰接架一12和铰接架二13远离连接块11一端分别固定连接有移动块一2和移动块二3。
38.参照图1和图2,每个移动块一2和移动块二3底部靠近连接块11位置处均插接有连接板21,每个移动块一2和移动块二3对应连接板21位置处均螺纹连接有第一螺栓211,第一螺栓211穿过连接板21并螺纹连接于移动块一2另一侧,第一螺栓211穿过连接板21并螺纹连接于移动块二3另一侧。每个移动块一2底部的连接板21均固定连接有连接架一22,每个移动块二3底部的连接板21均固定连接有连接架二31。用户使用时,拧动第一螺栓211,即可对连接板21和连接架一22、连接板21和连接架二31进行拆卸。
39.参照图1和图3,两个连接架一22和两个连接架二31之间均可拆卸连接有支撑杆一32,每个连接架一22和连接架二31对应支撑杆一32位置处均螺纹连接有第二螺栓321,第二螺栓321穿过支撑杆一32并螺纹连接于连接架一22另一侧,第二螺栓321穿过支撑杆一32并螺纹连接于连接架二31另一侧。每组移动架1内的两个相对应的连接架一22和连接架二31之间均可拆卸连接有支撑杆二33,每个连接架一22和连接架二31对应支撑杆二33位置处均螺纹连接有第三螺栓331,第三螺栓331穿过支撑杆二33并螺纹连接于连接架一22另一侧,第三螺栓331穿过支撑杆二33并螺纹连接于连接架二31另一侧。每组移动架1内的连接架一22和另一组移动架1内的连接架二31均共同插接有转动杆34,每个转动杆34中间位置处均滑动连接有转动块341,两个转动块341相互靠近一侧相互铰接。用户使用时,拧动第二螺栓321,即可对支撑杆一32进行安装和拆卸,拧动第三螺栓331,即可对支撑杆三进行安装和拆卸,拔动转动杆34,即可将转动杆34和连接架一22分离,即可将转动杆34和连接架二31分离。
40.参照图1,每个移动块一2和移动块二3远离连接块11一端均固定连接有支撑架23。每个支撑架23远离连接块11一端均转动连接有滑动辊24,每个支撑架23底部均转动连接有两个限位辊25。用户使用时,将滑动辊24抵接到钢轨上表面,限位辊25抵接到工字型钢轨的凹槽处,保证移动块一2和移动块二3能够正常沿着钢轨进行移动。每个滑动辊24远离连接块11一侧均固定连接有橡胶垫片241。用户使用时,橡胶垫片241减少滑动辊24与地面之间的磨损,延长滑动辊24的使用寿命。
41.参照图1和图4,每个连接块11顶部均固定连接有把手14。每个把手14侧壁均固定连接有橡胶套141。用户使用时,拉动把手14即可移动连接块11、移动块一2和移动块二3,节省人力。橡胶套141增大摩擦力,防止用户的手与把手14之间打滑。
42.实施例1的实施原理为:用户使用时,展开移动块一2和移动块二3,将两个转动杆34的两端分别插进对角设置的连接架一22和连接架二31上,然后拧动第一螺栓211,将连接板21和连接架一22与移动块一2连接好,将连接板21和连接架二31与移动块二3连接好。拧动第二螺栓321,将支撑杆一32两端和两个连接架一22连接好,将支撑杆一32两端和两个连接架二31连接好。拧动第三螺栓331,将支撑杆二33两端分别与一组移动架1内的连接架一22和连接架二31连接好。然后使滑动辊24抵接于钢轨,限位辊25抵接于工字型钢轨的凹槽处,保证轨道机器人能够正常对钢轨情况进行检测。检测后,将所有第一螺栓211拧下来,将两个连接架一22和两个连接架二31拆卸下来,将对角的连接架一22和连接架二31上的全部第二螺栓321和第三螺栓331拧下来,用户能够转动支撑杆一32和支撑杆二33,从而使两个支撑杆一32、两个支撑杆二33和两个转动杆34聚集到一起,然后转动铰接架一12和铰接架二13,铰接架一12和铰接架二13分别带动移动块一2和移动块二3靠近到一起,从而减小轨道机器人的体积,便于用户对轨道机器人进行移动。
43.实施例2:参照图5和图6,本实施例与实施例1的不同之处在于,每个移动块一2和移动块二3远离连接块11一端均开设有限位槽35,每个支撑架23靠近连接块11一端均固定连接有限位板231,限位板231插接于限位槽35内。每个移动块一2和移动块二3顶部对应限位槽35位置处均螺纹连接有限位螺栓232,限位螺栓232穿过限位板231并螺纹连接于移动块一2另一侧,限位螺栓232穿过限位板231并螺纹连接于移动块二3另一侧。用户使用时,拧动限位螺栓232,即可将限位板231和支撑架23从移动块一2和移动块二3拆卸下来,便于用户对滑动辊24和限位辊25进行更换。
44.参照图5,每个移动块一2顶部远离连接块11位置处均固定连接有连接带4,每个连接带4远离移动块一2一端均固定连接有具有弹性的卡接块41。每个移动块二3对应卡接块41位置处均开设有卡接槽42,卡接块41能够卡接于卡接槽42内。用户使用时,将移动块一2和移动块二3转动到一起后,然后将连接带4和卡接块41穿过两个支撑架23,并将卡接块41卡接于移动块二3的卡接槽42内,防止用户移动移动块一2和移动块二3时两者自行展开。
45.参照图5和图7,两个移动块一2相互远离一侧均固定连接有开口环5。每个开口环5对应开口位置处分别固定连接有第一夹紧片51和第二夹紧片52。每个第一夹紧片51和第二夹紧片52均共同螺纹连接有夹紧螺栓53。夹紧螺栓53对应第一夹紧片51远离第二夹紧片52一侧螺纹连接有夹紧螺母54,夹紧螺母54能够抵接于第一夹紧片51。每个开口环5内壁均固定连接有橡胶条55。用户使用时,将整理好的支撑杆一32、支撑杆二33和转动杆34一同插入开口环5内,然后将夹紧螺栓53和夹紧螺母54拧紧,使第一夹紧片51和第二夹紧片52相互靠
拢,从而使开口环5夹紧支撑杆一32、支撑杆二33和转动杆34,用户不必用手拿着支撑杆一32、支撑杆二33和转动杆34,节省人力。同时橡胶条55减少开口环5与支撑杆一32、支撑杆二33和转动杆34之间的磨损,延长支撑杆一32、支撑杆二33和转动杆34的使用寿命。
46.实施例2的实施原理为:用户使用时,将限位板231插进限位槽35内,然后拧紧限位螺栓232,即可正常使用滑动辊24和限位辊25。将移动块一2和移动块二3抵接到一起后,将连接带4和卡接块41穿过两个支撑架23,并使卡接块41卡接到卡接槽42内,保证用户移动移动块一2和移动块二3更加方便。然后将聚集到一起的支撑杆一32、支撑杆二33和转动杆34插到开口环5里,然后拧紧夹紧螺栓53和夹紧螺母54,使开口环5固定紧支撑杆一32、支撑杆二33和转动杆34,节省人力。
47.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1