一种多功能机器人的制作方法
1.本实用新型涉及消防设备领域,特别涉及一种多功能机器人。
背景技术:
2.当火灾发生时,现有的消防技术为使用云梯和消防水枪进行灭火和救援,由于消防设备的限制,现代的消防技术还需要人手灭火,特别是针对大型多层建筑的火灾现场,通过人手使用云梯和消防水枪的配合在高空对火灾现场进行灭火,现有的灭火救援方式还具有很大的弊端,从而导致灭火、救援困难,例如在大型火灾救援时一般需要的人手很多,而救援人员一般需要在一定的距离内靠近火场才能进行灭火救援,在火势较大的现场容易因各种变故的发生导致救援人员的受伤甚至牺牲,在我国,每年因救援火灾而造成伤亡的救护人员就有数百人之多,传统的救援方式已经不满足于现代需求;
3.现有的救援机器人一般只有单一的固定的功能,例如射水功能,除此外没法在机器人身上携带更多的功能,使得在进行救援时无法应对更多的突发情况,由于现有的救援机器人一般呈车的形状,因此,在使用环境不同的情况下,使用轮子行进的方式也不足够灵活,其适用性也收到影响,在不平的路面或草地、泥地上使用时其灵活性降低,无法应对各种行走环境,影响救援的进程;
4.另外,救援人员需要使用的灭火、救援设备繁多,设备需要做的灭火准备时间较长,容易影响救援时间,导致火势的蔓延,因此,现代的消防设备中,开发了消防救援机器人,现有的灭火设备,有专用于消防救援用的机器人,能在一定的程度减轻救援人员的工作,而现有的消防救援机器人不具有稳固、高效攀爬墙面的功能,一般只适合在地面上进行喷水洒水,在高层建筑的火场中能发挥的作用很小,功能性不足,难以做到陆空两用;
5.由于未能有能使机器人在墙壁上稳固进行攀爬的技术,导致机器人一般需要借助吊具或在机器人脚部安装吸盘才能实现高空救援,但显然,使用吊具的方式十分耗费资源,效果并不显著,而利用吸盘实现爬墙的技术仅适合在光滑的墙壁上使用,例如玻璃、陶瓷,不能应对例如水泥、木材等墙面的攀爬,且效率非常低,对救援造成时间拖延,具有很大弊端,因此,能使机器人在墙壁上稳固、快速地进行攀爬为实现机器人救援的重点,且需要适应多种墙面的攀爬,显然现代科技中还未能做到此点。
技术实现要素:
6.针对上述现有技术,本实用新型要实现的技术是:使机器人具有能高效、稳固攀爬墙面的能力。
7.本实用新型进一步要解决的技术问题是:使机器人活动更加灵活,能在各种不同的地面进行行走。
8.本实用新型进一步要解决的技术问题是:使机器人能搭载多种功能性用具。
9.为了达到上述目的,本实用新型采用以下方案:
10.一种多功能机器人,包括有机器人本体,在所述机器人本体内设有多功能平台,在
所述多功能平台上设置有多功能机械臂,在所述机器人本体上设置有墙壁行进装置,在所述墙壁行进装置内设置有供弹仓,在所述供弹仓内设置有多个固墙锚钉,在所述固墙锚钉内设置有火芯,在所述墙壁行进装置内设置有能装载固墙锚钉的击发转轮,在所述墙壁行进装置内设置有能切割火芯从而将固墙锚钉射出的击发结构,在所述墙壁行进装置内设置有行进脚部件,在所述机器人本体上活动设置有多个飞行模块。
11.进一步地,本实用新型中的机器人本体包括有机器人基座,在所述机器人基座上设置有多个用于爬行的脚部,在所述机器人基座上设有连接脚部的电子控制液压分控器。
12.进一步地,本实用新型中的多功能平台活动设置在机器人基座上侧,在所述多功能平台上设置有图像传输装置,所述多功能机械臂设置在多功能平台上,在所述多功能机械臂上装设有可装拆的射水结构以及运输结构,在所述脚部上装设有多个能活动的探头。
13.进一步地,本实用新型中的墙壁行进装置包括有铰接在脚部上的外壳,所述供弹仓设置在外壳内,在所述供弹仓一侧设置有上弹仓,所述击发转轮设置在上弹仓一侧,所述击发结构设置在击发转轮一侧,在所述击发结构一侧设置有锚钉击发管,在所述锚钉击发管一侧设置有导气装置,所述行进脚部件设置在外壳下侧。
14.进一步地,本实用新型中的外壳内部设置有支撑架,所述上弹仓设置在支撑架和供弹仓之间并相互连通,在所述上弹仓内设有分弹架,所述击发转轮设置在支撑架内部。
15.进一步地,本实用新型中的击发转轮包括有转轴以及固设在转轴上的多个鳍片,在两个相邻的鳍片之间形成装弹槽。
16.进一步地,本实用新型中的击发结构包括有固设在转轴顶部的内齿环,在所述内齿环上方设置有无刷电机,所述无刷电机的转子下侧装设有啮合内齿环的减速齿轮,所述无刷电机一侧通过设有连接杆与下盖固定连接,在所述支撑架上设置有能切割火芯的切割槽,在所述支撑架底部设置有能让固墙锚钉穿过的射孔。
17.进一步地,本实用新型中的行进脚部件包括有固定锚钉击发管上的l形架,在所述l形架底部铰接有爬行脚,在所述爬行脚侧壁和l形架侧壁之间设置有能驱动爬行脚转动的气缸,所述气缸连接电子控制液压分控器,在所述爬行脚上设置有能卡在固墙锚钉上的脱钉槽,所述脱钉槽呈喇叭状,在所述爬行脚底部设置有防滑纹。
18.进一步地,本实用新型中的固墙锚钉包括有钉身,在所述钉身上活动设置有墙壁固定部件,在所述钉身一侧设有钉帽,在所述钉帽上设有能驱动墙壁固定部件向外延伸打开的联动结构,在所述钉帽上设置有能使钉帽被带动活动的火芯。
19.进一步地,本实用新型中的飞行模块包括有铰接在机器人基座上的飞行摆动架,在所述飞行摆动架上活动设置有飞行转动架,在所述飞行转动架上铰接有涡喷发动机。
20.综上所述,本实用新型相对于现有技术其有益效果是:
21.本实用新型结构简单,使用方便,解决现有技术当高层建筑物发生火灾时灭火救援困难的弊端,使用陆空两用的机器人,能极大程度减轻救援人员的救援压力,减少人员的使用,从而降低救援人员的伤亡率,使机器人能稳定地在墙壁上进行行走,方便机器人固定在墙壁上对火灾现场进行洒水等灭火救援工作,不需要借助其他工具即可完成攀爬动作,且适应各种不同的墙面,例如水泥、木板等材质的墙面,同样能在墙壁上攀爬,整体轻盈体积小,防止在爬墙时因重量过大导致机器人脱墙,造成机器损失或救援人员伤亡;
22.且,在陆上使用时,机器人能灵活稳定地在各种不同的路面上进行行走,且能通过
各种工具对火灾现场进行洒水等灭火救援工作,各种救援用具可根据现场的突发情况进行更替,装拆十分的方便,整体轻盈体积小,动作灵活,足以应对多变的救援现场。
附图说明
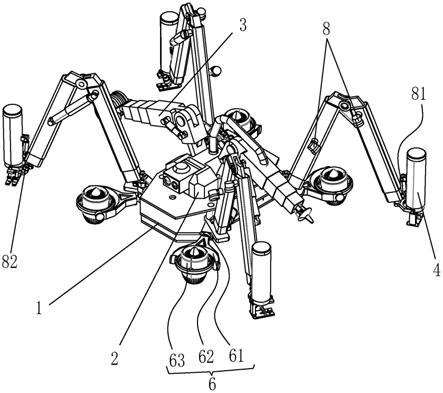
23.图1为本实用新型中多功能机器人的立体示意图。
24.图2为本实用新型中机器人本体的立体示意图。
25.图3为本实用新型中机器人本体的分解示意图之一。
26.图4为本实用新型中机器人本体的分解示意图之二。
27.图5为本实用新型中机器人本体的分解示意图之三。
28.图6为本实用新型中机器人本体的分解示意图之四。
29.图7为本实用新型中机器人本体的剖析示意图。
30.图8为本实用新型中墙壁行进装置的立体示意图。
31.图9为本实用新型中墙壁行进装置的分解示意图之一。
32.图10为本实用新型中墙壁行进装置的分解示意图之二。
33.图11为本实用新型中墙壁行进装置的分解示意图之三。
34.图12为本实用新型中墙壁行进装置的分解示意图之四。
35.图13为本实用新型中墙壁行进装置的分解示意图之五。
36.图14为本实用新型中墙壁行进装置的剖析示意图。
37.图15为本实用新型中墙壁行进装置的分解示意图之六。
38.图16为本实用新型中墙壁行进装置的分解示意图之七。
39.图17为本实用新型中固墙锚钉的立体示意图之一。
40.图18为本实用新型中固墙锚钉的立体示意图之二。
41.图19为本实用新型中固墙锚钉的剖析示意图。
42.图20为本实用新型中固墙锚钉的分解示意图。
具体实施方式
43.下面结合附图说明和具体实施方式对本实用新型作进一步描述:
44.如图1至20所示的一种多功能机器人,包括有机器人本体1,在所述机器人本体1内设有多功能平台2,在所述多功能平台2上设置有多功能机械臂3,在所述机器人本体1上设置有墙壁行进装置4,在所述墙壁行进装置4内设置有供弹仓41,在所述供弹仓41内设置有多个固墙锚钉5,在所述固墙锚钉5内设置有火芯51,在所述墙壁行进装置4内设置有能装载固墙锚钉5的击发转轮42,在所述墙壁行进装置4内设置有能切割火芯51从而将固墙锚钉5射出的击发结构43,在所述墙壁行进装置4内设置有行进脚部件44,在所述机器人本体1上活动设置有多个飞行模块6,机器人本体1为救援机器人的主躯干,通过本机器人本体1使救援机器整体能多向活动,并在各种场地上进行爬行,可通过机器人本体1能在多种不同的地面进行爬行,供弹仓41一侧设置有上弹仓46,击发结构43一侧设置有锚钉击发管47,在所述锚钉击发管47一侧设置有导气装置48,墙壁行进装置4安装在机器人的机器人本体1的脚部12上,当机器人本体1的多个脚部12上都安装了墙壁行进装置4,再通过多个脚部12的相互配合实现在墙壁上爬行,使用时,预先在供弹仓41内放入多个固墙锚钉5,机器人的机器人
本体1在爬墙时供弹仓41将固墙锚钉5供给至上弹仓46,上弹仓46进一步将固墙锚钉5供给至击发转轮42,此时位于击发转轮42内的固墙锚钉5待被击发,击发结构43带动击发转轮42不断转动,当击发转轮42转动至既定位置,固墙锚钉5的火芯51将被切割,固墙锚钉5将从锚钉击发管47处被射出,导气装置48将火药燃烧时产生的气体释放,此时固墙锚钉5将射入墙壁上,通过行进脚部件44卡在固墙锚钉5上固定,通过多个的墙壁行进装置4不断将固墙锚钉5射入墙壁,再通过多个机器人本体1的脚部12上的行进脚部件44与固墙锚钉5的配合,使整体机器人能在墙壁上爬行,另外,整体机器人能在不使用固墙锚钉5的情况下,仅通过行进脚部件44的活动实现在陆地上行走,实现消防机器人陆空两用的特点,固墙锚钉5在使用时,多个的固墙锚钉5整体预先安装在墙壁行进装置4上,通过墙壁行进装置4的启动,将火芯51切割,火芯51收到挤压引燃爆炸,使固墙锚钉5被爆炸力驱动,带动固墙锚钉5向墙面喷射而出。
45.本实用新型中所述机器人本体1包括有机器人基座11,在所述机器人基座11上设置有多个用于爬行的脚部12,在所述机器人基座11上设有连接脚部12的电子控制液压分控器13,机器人本体1在使用时,可通过机器人基座11上的多个脚部12配合电子控制液压分控器13使机器人能在多种不同的地面进行爬行,脚部12设置有多个,并均匀分布在机器人基座11上。
46.所述机器人基座11包括有主板111,在所述主板111下侧分别依次间隔固设有夹板112以及底板113,主板111、夹板112、底板113之间相互平行并且保留有一定的距离。
47.所述脚部12包括有铰接在主板111和夹板112之间的多个转动板121,在所述在主板111和夹板112之间还铰接有脚部气缸一122,所述脚部气缸一122的活动端头铰接在转动板121上,在所述转动板121上壁铰接有脚杆一123,在所述脚杆一123侧壁和转动板121上壁之间铰接有脚部气缸二124,在所述脚杆一123外端铰接有脚杆二125,在所述脚杆一123和脚杆二125之间铰接有脚部气缸三126,在所述脚杆二125外端铰接有脚底架127,脚部12设置在夹板112和底板113之间并且设置有多个,活动时可通过脚部气缸一122带动转动板121转动,脚杆一123通过脚部气缸二124带动摆动,脚杆二125通过脚部气缸三126带动摆动,使转动板121、脚杆一123、脚杆二125之间的配合能让脚部12整体在地上爬行,本脚部12整体能安装墙壁行进装置4使机器人本体1能在墙壁上行进,具体为将墙壁行进装置4安装在脚底架127上,脚底架127能在脚杆二125上转动,进一步提高灵活性,在脚杆二125和墙壁行进装置4之间设置有连接气缸81,连接气缸81用于带动墙壁行进装置4整体的转动,连接气缸81连接电子控制液压分控器13,脚杆一123、脚杆二125均为伸缩杆,由管件一91、管件二92、伸缩电机93、螺纹杆94、螺纹套95、光杆96组成,为现有常见的伸缩杆技术,使用时具体为伸缩电机93以及光杆96固定在管件一91上,螺纹杆94设置在伸缩电机93的活动端头上,螺纹套95固定在管件二92上,螺纹杆94螺纹连接螺纹套95内部螺纹,光杆96活动插设在螺纹套95内,实现管件一91能在管件二92上伸缩活动。
48.所述脚底架127上还固设有射水头82,射水头82同样能外连接水管,射水头82射水方向对准脱钉槽444上的固墙锚钉5射出位置,当脱钉槽444卡在固墙锚钉5上后,将使固墙锚钉5与墙壁的连接处上方产生缝隙,射水头82将射水至固墙锚钉5的上侧缝隙中,将水注入墙壁的保温层,为保温层灭火或散热。
49.本实用新型中所述多功能平台2活动设置在机器人基座11上侧,在所述多功能平
台2上设置有图像传输装置21,所述多功能机械臂3设置在多功能平台2上,在所述多功能机械臂3上装设有可装拆的射水结构31以及运输结构32,在所述脚部12上装设有多个能活动的探头8,图像传输装置21设置在多功能平台2上,图像传输装置21和探头8上设置有光电雷达,可以探测地形,通过天线将地形材质等数据传输到地面站,将图像数据显示在地面站的总控制台上,探头8具有地形测绘和红外热成像功能,热成像功能可以探测烟雾内的情况,可通过无线连接的方式将图像传输至总控制台,以便对机器人实时进行管理,多功能机械臂3安装在多功能平台2上,射水结构31以及运输结构32可通过使用者自由安装在多功能机械臂3上,使救援机器人具备射水和物件运输功能,另外,除去射水结构31和运输结构32外,还可在多功能机械臂3上安装其他功能性配件,例如分散式射水头、汇聚式涉水头或是其他射水方式的配件,也可安装灭火喷雾等。
50.所述多功能平台2包括有设置在主板111上方的旋转台201,在所述旋转台201底部固设有转动齿轮202,在所述主板111上壁固设有旋转台电机203,在所述旋转台电机203的转子上装设有啮合转动齿轮202的驱动齿轮204,救援机器人运行时,通过使用者的控制,能使旋转台电机203启动,旋转台电机203将通过驱动齿轮204带动转动齿轮202转动,由于转动齿轮202固定在旋转台201上,因此,旋转台201将同步转动,旋转台电机203通过无线连接总控制台,使用者通过总控制台能使旋转台201左右转动,从而实现图像传输装置21的全方位图像监控,所述旋转台201左右两侧对称设置有侧槽205,在所述旋转台201前侧设置有前置槽206,侧槽205用于放置多功能机械臂3,前置槽206用于放置图像传输装置21。
51.所述多功能机械臂3包括有铰接在侧槽205前后两侧壁之间的活动臂一301,在所述活动臂一301和旋转台201之间铰接有机械臂气缸一302,在所述活动臂一301上铰接有活动臂二303,在所述活动臂二303和活动臂一301之间铰接有机械臂气缸二304,在所述活动臂二303内设有多级伸缩臂305,使用时,活动臂一301可通过机械臂气缸一302带动从而发生摆动,活动臂二303通过机械臂气缸二304从而在活动臂一301上发生摆动,多级伸缩臂305插在活动臂二303上,可进行伸展或收缩,通过多个层层套叠的环形件实现多级伸缩,用于调整射水结构31、运输结构32或是其他外置功能性配件的位置,也可安装防暴盾牌使其具备防暴功能等拟人化消防功能。
52.所述射水结构31包括有嵌设在其中一个多级伸缩臂305上的射水嵌板311,在所述射水嵌板311外壁固设有波纹管312,在所述波纹管312外端固设有喷嘴313,在所述喷嘴313侧壁和射水嵌板311外壁之间设置有多个喷嘴气缸314,在所述活动臂二303上设置有射水管315,所述射水管315一端连通波纹管312,所述射水管315另一端固设在旋转台201上壁,在所述转动齿轮202底部中心处固设有弯头316,所述弯头316连通射水管315,所述弯头316插设在主板111中心处,使用时,通过将射水嵌板311嵌入多级伸缩臂305上实现安装固定,波纹管312为可伸缩的管件,为现有技术,用于使喷嘴313通过喷嘴气缸314的带动后能够进行伸缩,射水管315用于将水供应至喷嘴313射出,具体为弯头316通过管道外连水泵,通过水泵将水抽上弯头316,再通过弯头316进入射水管315,最后从射水管315射出,弯头316插设在主板111中心处并固定在转动齿轮202底部,因此弯头316除射水功能外还充当转动齿轮202转动的轴心。
53.所述运输结构32包括有嵌设在其中一个多级伸缩臂305上的运输嵌板321,在所述运输嵌板321外壁固设有绳轮架322,在所述绳轮架322上活动设置有绳轮323,在所述绳轮
架322上设置有能带动绳轮323转动的绳轮电机324,所述绳轮323上绕设有绳子,通过将运输嵌板321嵌入多级伸缩臂305上实现安装固定,绳轮架322用于使绳轮323能定点转动,绳轮323上事先绕设有绳子,当绳轮323通过绳轮电机324带动转动将使绳子能收卷在绳轮323上,或通过绳轮电机324反向转动将绳子放出,便于绑上物资进行传输。
54.所述图像传输装置21铰接在前置槽206内壁左右两侧之间,使用铰接的方式使图像传输装置21能够上下摆动,配合旋转台201能旋转的特性,使图像传输装置21能多角度进行监测。
55.所述电子控制液压分控器13设置在夹板112和底板113之间,所述电子控制液压分控器13通过液压管分别连接机械臂气缸一302、机械臂气缸二304、喷嘴气缸314、脚部气缸一122、脚部气缸二124、脚部气缸三126,通过电子控制液压分控器13可对机械臂气缸一302、机械臂气缸二304、喷嘴气缸314、脚部气缸一122、脚部气缸二124、脚部气缸三126进行操控,电子控制液压分控器13可通过软件远程控制,使机器人的整体动作能根据使用者的要求进行。
56.本实用新型中所述墙壁行进装置4包括有铰接在脚部12上的外壳45,所述供弹仓41设置在外壳45内,在所述供弹仓41一侧设置有上弹仓46,所述击发转轮42设置在上弹仓46一侧,所述击发结构43设置在击发转轮42一侧,在所述击发结构43一侧设置有锚钉击发管47,在所述锚钉击发管47一侧设置有导气装置48,所述行进脚部件44设置在外壳45下侧,在所述墙壁行进装置4和脚部12之间设有连接气缸81。
57.所述外壳45包括有壳身451以及分别设置在壳身451上下两侧的上盖452和下盖453,上盖452能拆出进而将固墙锚钉5批量放入供弹仓41内,壳身451亦能从下盖453上拆出,从而方便对内部进行维修和维护。
58.所述供弹仓41包括有设置壳身451内部的弹夹411,在所述弹夹411顶部设置有进弹口412,在所述弹夹411内部设置有能带动固墙锚钉5向下移动的波轮电机413,在所述弹夹411内固设有斜挡板414,所述斜挡板414从上至下由宽变窄,在所述弹夹411下部设置有能使固墙锚钉90
°
转动的凸块415以及滑弹槽416,在所述弹夹411下部侧壁上设置有出弹口417,在所述弹夹411上以及壳身451上穿设有多个观察孔418,弹夹411内从进弹口412批量装入固墙锚钉5,可实现多路或单路装入固墙锚钉5,通过内部的波轮电机413使固墙锚钉5向下供给,当固墙锚钉5移动至斜挡板414,斜挡板414将多路的固墙锚钉5汇流在斜挡板414下侧,当固墙锚钉5进入滑弹槽416,此时固墙锚钉5通过凸块415对固墙锚钉5头部的顶压,使固墙锚钉5以锚钉头为中心点转动90
°
,转动90
°
后的固墙锚钉5从出弹口417供给至上弹仓46,滑弹槽416后侧为弧形内壁,便于固墙锚钉5的转动。
59.本实用新型中所述外壳45内部设置有支撑架7,所述支撑架7为圆柱状,在所述支撑架7内部设置有内腔72,所述上弹仓46设置在支撑架7和弹夹411之间并相互连通,在所述上弹仓46内设有分弹架461,所述击发转轮42设置在支撑架7内部,所述击发转轮42设置在支撑架7内部并紧贴支撑架7内壁,工作时,支撑架7固定在上弹仓46一侧,当固墙锚钉5从出弹口417供给至上弹仓46,上弹仓46内部分弹架461将供给来的固墙锚钉5分流并使固墙锚钉5装入内腔72内部的击发转轮42上,击发转轮42能在内腔72内转动,从而使已装入击发转轮42内的固墙锚钉5跟随移动,直至被射出,通过固墙锚钉5的不断射出以及不断从上弹仓46处供给的新的固墙锚钉5,实现固墙锚钉5能不断被击发,直至固墙锚钉5射空。
60.本实用新型中所述击发转轮42包括有转轴421以及固设在转轴421上的多个鳍片422,在两个相邻的鳍片422之间形成装弹槽423,击发转轮42上的多个鳍片422之间的间隔一致,并且在多个鳍片422之间的间隔处形成装弹槽423,固墙锚钉5能从上弹仓46经过分弹架461装入装弹槽423内,装入固墙锚钉5后,当转轴421被击发结构43带动转动,将带动固墙锚钉5跟随位移,直至被射出,由于击发转轮42外壁紧贴支撑架7的内腔72内壁,因此固墙锚钉5在转动过程中不会脱出装弹槽423。
61.本实用新型中所述击发结构43包括有固设在转轴421顶部的内齿环431,在所述内齿环431上方设置有无刷电机432,所述无刷电机432的转子下侧装设有啮合内齿环431的减速齿轮433,所述无刷电机432一侧通过设有连接杆434与下盖453固定连接,在所述支撑架7上设置有能切割固墙锚钉5的火芯51的切割槽435,在所述支撑架7底部设置有能让固墙锚钉5穿过的射孔436,使用时,通过无刷电机432的启动,带动减速齿轮433转动,减速齿轮433带动内齿环431不断转动从而使转轴421转动,当转轴421转动,固墙锚钉5在击发转轮42处跟随位移时,并当固墙锚钉5的从尾部突出的火芯51转动至切割槽435处,切割槽435通过和火芯的撞击使火芯51被切割挤压,固墙锚钉5将被引燃,固墙锚钉5将从射孔436处向下射出。
62.所述支撑架7上设有能甩出固墙锚钉5残渣的空置槽71,固墙锚钉5击发后,产生的固墙锚钉5残渣从空置槽71被甩出,一般固墙锚钉5击发时不会产生残渣,为防止意外产生残渣时,避免残渣将击发转轮42卡死,残渣能提前从空置槽71被甩出。
63.本实用新型中所述行进脚部件44包括有固定套设在锚钉击发管47上的l形架441,在所述l形架441底部铰接有爬行脚442,在所述爬行脚442侧壁和l形架441侧壁之间设置有能驱动爬行脚442转动的气缸443,所述气缸443连接电子控制液压分控器13,在所述爬行脚442上设置有能卡在固墙锚钉5上的脱钉槽444,所述脱钉槽444呈喇叭状,在所述爬行脚442底部设置有防滑纹445,当固墙锚钉5射入墙壁时,由于脱钉槽444的槽位置不会挡着固墙锚钉5的射出位置,因此固墙锚钉5射出并嵌入墙壁上后,固墙锚钉5将位于脱钉槽444的内部,并通过脱钉槽444卡在固墙锚钉5上实现固定,通过气缸443的带动,使爬行脚442能活动,通过机器人本体1的多只脚部12上安装本装置配合射出固墙锚钉5,以及脚部12卡在固墙锚钉5上,实现在墙壁上爬行。
64.所述锚钉击发管47包括有固设在支撑架7底部并与射孔436同心设置的第一管体471,在所述下盖453底部固设有连通第一管体471的第二管体472,固墙锚钉5从击发转轮42处被击发后,固墙锚钉5将经过射孔436射入第一管体471,再射入第二管体472,进而从第二管体472射出,射入墙壁中。
65.所述导气装置48包括有分别设置在第一管体471上下两侧的第一固定件481以及第二固定件482,在所述第二固定件482内设有连通第一管体471内部的l形管路483,在所述第一固定件481内插设有活塞杆484,在所述活塞杆484底部固设有活塞头485,所述活塞头485设置在l形管路483内限位活动,在所述活塞头485顶壁和第一固定件481底壁之间设置有套设在活塞杆484上的复位弹簧486,固墙锚钉5在击发时,产生的燃烧气体将进入l形管路483,使活塞头485被向上顶压,直至活塞头485脱离l形管路483,此时燃烧气体将释放在外界空气中,完成排气的目的,活塞头485通过活塞杆484被复位弹簧486的带动复位,重新插入l形管路483内等待下次排气,本导气装置48还可以起到减小后坐力和控制火药动力的
作用,通过设置导气装置48的松紧度可调节后坐力和控制火药动力大小,具体可通过更换复位弹簧486实现。
66.本实用新型中所述固墙锚钉5包括有钉身52,在所述钉身52上活动设置有墙壁固定部件53,在所述钉身52一侧设有钉帽54,在所述钉帽54上设有能驱动墙壁固定部件53向外延伸打开的联动结构55,在所述钉帽54上设置有能使钉帽54被带动活动的火芯51,当钉身52插入墙壁时,由于钉身52整体位于墙壁行进装置4的脱钉槽444内,因此钉帽54将被卡在脱钉槽444内,而此时钉身52受爆炸力冲击仍处于在墙壁内射行状态,此时钉帽54的停止状态将通过联动结构55将墙壁固定部件53带动张开,墙壁固定部件53将如同倒刺般卡入墙壁内实现固定,此时钉身52稳固固定在墙壁内,随后,可通过固墙锚钉5的进一步形变实现更稳固的固定,具体操作是,由于固墙锚钉5卡在墙壁行进装置4的脱钉槽444内,可通过墙壁行进装置4的爬行脚442沿墙壁向外侧翻转,使钉帽54被带动向外侧同时移动,此时联动结构55将进一步带动墙壁固定部件53向外张开,实现更进一步稳固的墙壁固定,当固墙锚钉5完全稳固地嵌入在墙壁后,通过机器人带动墙壁行进装置4的活动,使墙壁行进装置4的爬行脚442以固墙锚钉5为支撑点向上攀爬,再通过机器人多个脚部12上的墙壁行进装置4与锚钉的配合,实现机器人的墙壁爬行,固墙锚钉5已使用后,可通过在其钉身52内部安装牵引结构控制,收回已固定在墙上的固墙锚钉5,从而通过微加工反复利用。
67.所述钉身52内部设有凹腔521,所述凹腔521顶部开口,在所述钉身52上设置有多个连通凹腔521的侧腔522,凹腔521应与钉身52同心设置,凹腔521用于联动结构55和墙壁固定部件53的配合使用,侧腔522可设置为多个,用于与墙壁固定部件53的铰接。
68.所述墙壁固定部件53铰接在侧腔522内部,墙壁固定部件53和侧腔522的铰接点应设在下段,使墙壁固定部件53的转动能如同倒刺卡入墙壁内。
69.所述联动结构55包括有设置在钉帽54底部并活动插设在凹腔521内部的联动杆551,在所述联动杆551上设置有形槽552,在所述墙壁固定部件53内侧固设有顶块553,所述顶块553活动设置在形槽552内,当火芯51被墙壁行进装置4切割挤压,钉帽54带动钉身52向墙壁射出时,钉身52嵌入墙壁内,由于爬行脚442上的脱钉槽444将钉帽54卡死,钉身52此时仍处于射行状态,联动杆551将由于钉帽54的卡死在钉身52内活动,使联动杆551往脱离凹腔521的方向移动,而因顶块553一直处于形槽552内,当联动杆551移动时,将通过形槽552的位移带动多个的顶块553同时活动,从而使墙壁固定部件53沿着铰接点转动,从而使墙壁固定部件53张开,如同倒刺般卡死在墙壁内,墙壁行进装置4也因此稳固地卡在钉帽54和墙壁之间,当机器人需要行进时,可进一步通过墙壁行进装置4上的爬行脚442转动,利用杠杆原理使钉帽54进一步被拉出,从而通过联动使各个墙壁固定部件53进一步翻转,实现更强的固定,而爬行脚442此刻为可活动状态,配合机器人的多只脚部12活动,实现爬墙行进的目的。
70.所述钉帽54顶部设置有嵌槽541,嵌槽541用于安装火芯51,防止在火芯51在被切割挤压时与钉帽54偏位,优选使用本嵌槽541,成本低廉,也可使用胶水或通过折弯铝材将火芯51固定。
71.所述火芯51包括有嵌设在嵌槽541内的火药盒511,在所述火药盒511内部上侧固设有引燃物512,在所述火药盒511内填充有火药并将引燃物512包覆在内,在所述火药盒511内部底壁固设有多个能固定火药的凸柱513,当墙壁行进装置4上的击发结构43将火药
盒511切割,使火药盒511被瞬间挤压变形,从而使内部的引燃物512被瞬间挤压,使引燃物512被引燃,带动周围的火药引燃,从而使钉帽54被推动射出,凸柱513用于固定火药,防止火药在火药盒511内无规则移动,类似于混凝土内的钢筋所起的作用。
72.所述引燃物512为硝石,燃点低,被力量瞬间挤压后能燃烧。
73.所述火药盒511使用耐高温材料制成,由于墙壁行进装置4在多次射出固墙锚钉5后,内部的锚钉击发管47将快速升温,为防止内部火药意外被引燃,火药盒511使用耐高温的材料。
74.所述钉身52下端呈圆锥状,优选为圆锥形,也可以是其他尖锐的形状,便于嵌入墙壁内。
75.本实用新型中所述飞行模块6包括有铰接在机器人基座11上的飞行摆动架61,在所述飞行摆动架61上活动设置有飞行转动架62,在所述飞行转动架62上铰接有涡喷发动机63,使用时,飞行摆动架61可手动转动调整位置,飞行转动架62可手动转动调整角度,涡喷发动机63为现有技术,当多个的涡喷发动机63在机器人外围同时启动,将会带动消防机器人整体往上升起,飞行模块6主要作用为带动消防机器人整体升起至一定高度再使消防机器人整体趴在墙壁上攀爬,以使消防机器人不需要攀爬太长的距离,减少攀爬的时间。
76.以上显示和描述了本实用新型的基本原理和主要特征以及本实用新型的优点,本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1