一种智能机械手纸箱抓具的制作方法
1.本实用新型涉及一种智能机械手抓具,尤其涉及一种智能机械手纸箱夹具。
背景技术:
2.纸箱包装在生产生活中较为常见,很多产品都采用纸箱进行包装,在生产运输过程中,需对纸箱进行堆叠码垛,采用人工的方式进行码垛,不仅人工成本较高,还可能在堆垛过程的发生危险,现有技术中,在大型产线上都是采用智能机械手和抓具进行搬运码垛,但是在使用过程中发现,现有的抓具一般都采用真空吸盘吸取,没有防护措施,纸箱容易掉落,而且放置时定位不够准确,造成码垛的纸箱不够稳定容易倾倒,造成安全隐患。
技术实现要素:
3.【1】要解决的技术问题
4.本实用新型要解决的技术问题是提供一种定位准确,结构简单,安全可靠的智能机械手纸箱抓具。
5.【2】解决问题的技术方案
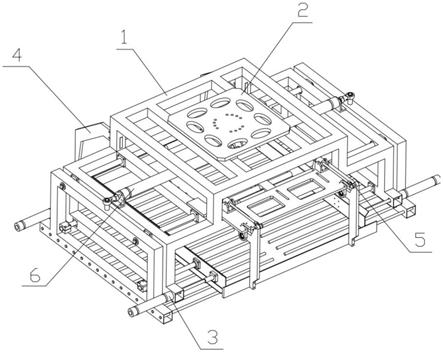
6.本实用新型提供一种一种智能机械手纸箱抓具,包括有:机架1,所述机架1上设有机械臂连接板2,所述机架1左右两侧对称设有用于纸箱夹紧定位的对夹组件3,所述机架1后侧设有用于纸箱后侧定位的后档组件4,所述机架1前侧设有用于纸箱前侧定位的前挡组件5,所述对夹组件3外侧对称设有用于支撑纸箱的兜底组件6。
7.进一步的,所述对夹组件3包括有对称安装在所述机架1上的对夹气缸31,所述对夹气缸31的输出端固定有夹板32,所述对夹气缸31内侧对称设有第一导向轴33,所述第一导向轴33通过带座轴承34穿设在所述机架1上并和所述夹板32固定,所述第一导向轴33上还套设有用于轴向限位的夹紧块35。
8.进一步的,所述对夹气缸31的输出端设有连接杆36,所述夹板32上固定有连接块37,所述连接杆36卡设在所述连接块37内。
9.进一步的,所述后档组件4包括有对称安装在所述机架1后侧的连接板41,所述连接板41之间固定有支撑板42,所述支撑板42上对称设有后档气缸43,所述后档气缸43的输出端设有后挡板44。
10.进一步的,所述前挡组件5包括有固定在所述机架1前侧的安装板51,所述安装板51上平行设置有前挡气缸52,所述前挡气缸52的输出端均铰接有侧板53,所述侧板53转动的安装在所述安装板52上,所述侧板52之间连接有前挡板54。
11.进一步的,所述安装板51上对称设有槽孔511,所述槽孔511下方均对称安装有支撑块55,所述支撑块55内均卡设有轴承56,所述侧板53通过转轴56卡设在所述支撑块55之间,所述前挡气缸52运动时能带动所述侧板53旋转。
12.进一步的,所述兜底组件6包括有对称固定在所述机架1左右两侧的兜底气缸61,所述兜底气缸61的输出端固定有支架62,所述支架62下方均布有多根用于纸箱支撑的支撑
杆63。
13.进一步的,所述兜底气缸61的输出端设有关节轴承611,所述支架52上设有和所述关节轴承611装配的凸台621。
14.进一步的,所述支架62两侧固定有第二导向轴64,所述第二导向轴64的通过直线轴承641穿设在所述机架1上。
15.进一步的,所述兜底气缸61通过第一安装座612和第二安装座613固定在所述机架1上。
16.【3】有益效果
17.本实用新型提供的一种智能机械手纸箱抓具,结构简单,定位准确,安全性较高,对纸箱进行周边定位,还设有兜底组件,避免在搬运过程纸箱掉落,安全性好。
附图说明
18.图1为本实用新型智能机械手纸箱抓具的结构示意图;
19.图2为本实用新型智能机械手纸箱抓具的俯视图;
20.图3为本实用新型智能机械手纸箱抓具的侧视图;
21.图4为本实用新型智能机械手纸箱抓具的正视图;
22.图5为本实用新型智能机械手纸箱抓具的对夹组件的结构示意图;
23.图6为本实用新型智能机械手纸箱抓具的对夹组件的连接杆装配图;
24.图7为本实用新型智能机械手纸箱抓具的后挡组件的结构示意图;
25.图8为本实用新型智能机械手纸箱抓具的前挡组件的结构示意图;
26.图9为本实用新型智能机械手纸箱抓具的兜底组件的结构示意图。
具体实施方式
27.下面结合附图,详细介绍本实用新型实施例。
28.参阅图1至图9,本实用新型提供一种智能机械手纸箱抓具,包括有机架1,在机架1上方固定有机械臂连接板2,在机械臂连接板2上开设有安装孔,用于和机械手进行装配,在机架1的左右两侧对称设有用于纸箱夹紧定位的对夹组件3,对纸箱的左右方向上进行限位,在机架1的后侧设有用于纸箱后侧定位的后档组件4,在机架的前侧设有用于纸箱前侧定位的前挡组件5,为了避免纸箱在搬运过程掉落,在对夹组件3的外侧对称设有兜底组件6.
29.对夹组件3包括有对称安装在机架1上的对夹气缸31,在对夹气缸31的输出端固定有夹板32,用于和纸箱的侧面顶紧贴合,为了避免在对夹气缸31在运动过程中发生卡滞,在对夹气缸31的输出端设有连接杆36,在夹板32上固定有连接块37,连接杆36的头部卡设在连接块37内并留有间隙,装配方式如图6所示,为了保证对夹气缸31的定位精度,在两个对夹气缸31的内侧对称设有第一导向轴33,第一导向轴33的一端和夹板固定,为了便于第一导向轴33的定位,在机架1上固定有和第一导向轴31对应的带座轴承34,为了使第一导向轴33在导向过程中运动平稳,能承受较大载荷,带座轴承34采用双衬结构,为了避免第一导向轴33在运动过程中脱落,在第一导向轴33的另一端设有夹紧块35,用于第一导向轴33的轴向限位。
30.后挡组件4用于纸箱后侧的辅助定位,包括有对称安装在机架1后侧的连接板41,在两块连接板41之间固定有支撑板42,在支撑板42上对称固定有后档气缸43,在后挡气缸43的输出端固定连接有后挡板44。
31.前挡组件5用于纸箱前侧的辅助定位,包括有固定在机架1前侧的安装板51,在安装板51上平行设置有两个前挡气缸52,前挡气缸52通过连接座58固定在固定板51上,在前挡气缸52的输出端铰接有侧板53,在固定板51上对称开设有槽孔511,在槽孔511下方均对称安装有支撑块55,在支撑块55内均卡设有轴承56,侧板53通过转轴56卡设在支撑块55之间,侧板53之间连接有前挡板54,在前挡气缸52运动时,能带动侧板53进行转动,使前挡板54能贴合纸箱的前侧面,为了避免侧板53在转动过程中发生卡滞,前挡气缸52的输出端固定有关节轴承和侧板53进行铰接,关节轴承是一种球面滑动轴承,其滑动接触表面是一个内球面和一个外球面,运动时可以在任意角度旋转摆动,关节轴承可在一定角度内作调心运动。
32.兜底组件6用于支撑纸箱,其设置在对夹组件3的外侧,包括有对称固定在机架1左右两侧的兜底气缸61,机架1上对称设有用于固定兜底气缸61的第一安装座612,在机架1中间设有第二安装座613,第二安装座613为双耳座,其用来辅助固定两兜底气缸61的尾部,在兜底气缸61的输出端分别固定有支架62,支架62平行于支架1设置,在支架62上均布有多根用于支撑纸箱的支撑杆63,为了使兜底气缸61在运行过程中不至于卡顿,在支架62两侧固定有第二导向轴64,第二导向轴64通过直线轴承641穿设在机架1上;兜底气缸61在带动支架62搬运纸箱时,需要承受纸箱的重量,所以兜底气缸61的输出端会在纸箱的重力作用下受到一定的扭力,兜底气缸61的输出轴一直受扭力作,会使兜底气缸61的运行时发生卡滞,所以兜底气缸61的输出端和支架62采用关节轴承611进行活动连接,在支架52上设有和关节轴承611装配的凸台621,采用关节轴承611可进行调心运动,兜底气缸61在运动过程中不会出现卡滞。
33.本实用新型提供的一种智能机械手纸箱抓具,结构简单,定位准确,安全性较高,对纸箱进行周边定位,还设有兜底组件,避免在搬运过程纸箱掉落,安全性好。
34.以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型技术原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1