一种机器人底盘前壳结构的制作方法
1.本实用新型涉及机器人技术领域,尤其涉及一种机器人底盘前壳结构。
背景技术:
2.消毒防疫机器人,又称消毒机器人,主要是以机器人为载体,在其内部装置消毒系统产生消毒气体,利用机器人的气动系统将消毒气体快速的在室内空间扩散,增加消毒的覆盖面和均匀性,能有效地杀空间内的致病微生物,广泛应用于医院、商场、化工车间、药品工厂和理化实验室当中。机器人在行驶过程中,机器人需要对周边环境进行探索,避免行驶过程中发生碰撞,但是,现有机器人中采用摄像头进行检测识别的探测视场角有限,生产成本较高;且机器人前行时只能对其行进方形的障碍物进行检测,不能检测其行驶路面的平整性,容易使机器人被凸起障碍物绊倒或被地面上的凹坑卡住,故实用性不强。
技术实现要素:
3.本实用新型的主要目的是解决现有技术中所存在的问题,提供一种机器人底盘前壳结构。
4.为解决上述技术问题,本实用新型采用的技术方案是:一种机器人底盘前壳结构,包括前壳体,所述前壳体设置呈弧型,且该前壳体的圆弧工作面上设置有水平探测单元,所述水平探测单元用于对机器人行进方向的障碍物进行探测,所述前壳体的底部设置有斜面,所述斜面上设置有低处监探单元,所述低处监探单元用于对机器人行进时的行驶路面情况进行探测。
5.进一步地,所述水平探测单元设置为超声波传感器。
6.进一步地,所述超声波传感器设置为多组,多组所述超声波传感器于靠近前壳体圆弧曲面的一侧形成一探测区域。
7.进一步地,所述低处监探单元设置为测距传感器。
8.进一步地,所述测距传感器设置为多组。
9.进一步地,所述斜面上均匀开设有多组容置槽,每组所述测距传感器设置于一组容置槽内。
10.进一步地,所述测距传感器的检测路径与机器人行进的水平方向之间形成的夹角为锐角。
11.进一步地,所述前壳体上设置有散热区域,所述散热区域上均匀开设有散热孔。
12.进一步地,所述前壳体的内侧设置有多组装配部,每组所述装配部上开设有一组装配孔。
13.进一步地,所述前壳体的两侧均开设有连接凸起,所述连接凸起上开设有通孔,所述连接凸起用于将前壳体安装于机器人的底座上。
14.本实用新型具有的优点和积极效果是:本实用新型结构简单,使用方便,通过在前壳体的圆弧工作面上设置水平探测单元,能够对机器人行驶路径前方的障碍物进行识别,
避免机器人与障碍物发生碰撞,且水平探测单元中设置的多组超声波传感器之间能够形成一个探测区域,扩大其对障碍物的检测范围,提高了探测能力;通过在斜面上设置多组低处监探单元,能够对机器人的行驶路面情况进行检测,以使其能够及时监测出行驶路面上的凸起障碍物、台阶或凹坑等凹陷区域,避免机器人在行驶时出现倾倒或卡顿,具有较好的安全性和实用性。
附图说明
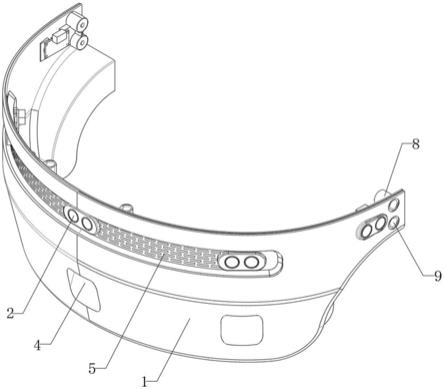
15.图1是本实用新型的立体结构示意图1;
16.图2是本实用新型的立体结构示意图2;
17.图3是本实用新型的侧视图;
18.图4是水平探测单元和低处监探单元与控制器之间的电性连接关系框图。
19.图中:1、前壳体;2、水平探测单元;3、低处监探单元;4、容置槽;5、散热区域;6、装配部;7、装配孔;8、连接凸起;9、通孔。
具体实施方式
20.为了更好的理解本实用新型,下面结合具体实施例和附图对本实用新型进行进一步的描述。
21.如图1和图4所示,一种机器人底盘前壳结构,包括前壳体1,前壳体1设置呈弧型,且该前壳体1的圆弧工作面上设置有水平探测单元2,水平探测单元2用于对机器人行进方向的障碍物进行探测,前壳体1的底部设置有斜面,斜面上设置有低处监探单元3,低处监探单元3用于对机器人行进时的行驶路面情况进行探测,利用水平探测单元2,能够对机器人行进方向上的障碍物进行检测,使其能够及时避开障碍物,避免两者发生碰撞;通过在斜面上设置低处监探单元3,能够对机器人行驶的路面情况进行监测,使其能够及时识别行驶路面上凸起障碍物、台阶或凹陷区域,避免机器人被卡住或出现倾倒现象。
22.如图1所示,水平探测单元2设置为超声波传感器,用于检测机器人行进时其底座的前方是否存在障碍物,以便机器人及时进行躲避;超声波传感器设置为多组,多组超声波传感器于靠近前壳体1圆弧曲面的一侧形成一探测区域,扩大机器人在行驶过程中对处于水平方向障碍物的检测范围,提高其检测能力,以便机器人能够对障碍物更好的进行躲避。
23.如图1和3所示,低处监探单元3设置为测距传感器,测距传感器设置为多组,多组测距传感器构成一个检测区域,并能够对前壳体1的斜下方的行驶路面进行监探,检测其行驶方向的前方是否存在凸起障碍物或凹陷结构,避免机器人行驶时出现倾倒或卡顿;斜面上均匀开设有多组容置槽4,每组测距传感器设置于一组容置槽4内,用于对测距传感器进行保护,避免其内部的测距传感器发生磕碰,测距传感器的检测路径与机器人行进的水平方向之间形成的夹角为锐角,使得测距传感器能够提前对行驶路面的路面情况进行检测。
24.如图2所示,前壳体1上设置有散热区域5,散热区域5上均匀开设有散热孔,用以对机器人底座内部进行散热,前壳体1的内侧设置有多组装配部6,每组装配部6上开设有一组装配孔7;前壳体1的两侧均开设有连接凸起8,连接凸起8上开设有通孔9,连接凸起8用于将前壳体1安装于机器人的底座上,通过装配部6和固定凸起的配合使用,能够将前壳体1稳定的装配于机器人的底座上。
25.另外,上述所涉及的前壳体1与超声波传感器之间、前壳体1与测距传感器之间可采用螺钉进行连接,装配部6与前壳体1之间、连接凸起8与前壳体1之间可采用一体成型的方式进行连接;且且图3所示,设测距传感器的检测路径与机器人行进的水平方向之间形成的夹角为α,且α为锐角,以保证低处监探单元3能够对行驶路面的路面情况进行检测;其中机器人、超声波传感器和测距传感器的具体结构与工作原理均属于本技术领域现有技术,本实用新型未对其进行改进;且水平探测单元2和低处监探单元3与机器人之间的电性连接关系、电性连接原理和电性连接方式均属于本技术领域现有技术,本实用新型未对其进行改进,故不再赘述。
26.本实用新型结构简单,使用方便,通过在前壳体1的圆弧工作面上设置水平探测单元2,能够对机器人行驶路径前方的障碍物进行识别,避免机器人与障碍物发生碰撞,且水平探测单元2中设置的多组超声波传感器之间能够形成一个探测区域,扩大其对障碍物的检测范围,提高了探测能力;通过在斜面上设置多组低处监探单元3,能够对机器人的行驶路面情况进行检测,以使其能够及时监测出行驶路面上的凸起障碍物、台阶或凹坑等凹陷区域,避免机器人在行驶时出现倾倒或卡顿,具有较好的安全性和实用性,本实用新型的具体工作原理如下:
27.机器人在行驶过程中,由其圆弧工作面上设置的水平探测单元2对其行进的前方进行检测,检测其前方是否存在障碍物,若存障碍物,则将识别信号传递给机器人,机器人对信号进行处理后对其行驶方向上的障碍物进行躲避;同时,利用斜面上设置的低处监探单元3对机器人的行驶路面情况进行监探,当监测到路面上存在凸起障碍物、台阶或凹坑等凹陷区域时,低处监探单元3将识别信号传递给机器人,使得机器人在行驶避开所检测到的凸起障碍物、台阶或凹坑等凹陷区域,使机器人平稳行驶,避免在行驶时出现磕碰与倾倒。
28.以上对本实用新型的实施例进行了详细说明,但内容仅为本实用新型的较佳实施例,不能被认为用于限定本实用新型的实施范围。凡依本实用新型范围所作的均等变化与改进等,均应仍归属于本专利涵盖范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1