一种自动机械手上下料生产线的制作方法
1.本实用新型涉及机械技术领域,特别涉及一种自动机械手上下料生产线。
背景技术:
2.自动化是指机器设备、系统或过程在没有人或较少人的直接参与下,按照人的要求,经过自动检测、信息处理、分析判断和操纵控制,实现预期的目标的过程,自动化技术广泛用于工业、农业、军事、科学研究、交通运输、商业、医疗、服务和家庭等方面,采用自动化技术不仅可以把人从繁重的体力劳动、部分脑力劳动以及恶劣、危险的工作环境中解放出来,而且能扩展人的器官功能,极大地提高劳动生产率,增强人类认识世界和改造世界的能力。
3.现有技术的一种自动化生产线的上下料机械手,包括基座,所述基座的顶部固定连接有减震垫,所述减震垫的顶部固定连接有支柱,所述支柱的外壁活动连接有传送带,所述传送带的顶部固定连接有夹具,所述减震垫的顶部固定连接有控制箱,所述控制箱的右侧活动连接有箱门,所述控制箱的顶部固定连接有冷却箱,所述冷却箱的内部固定连接有冷却管,所述冷却箱的右侧固定连接有滑槽体,所述控制箱的顶部固定连接有气泵,所述气泵的左侧固定连接有固定管,所述控制箱的右侧开设有网孔。该自动化生产线的上下料机械手,具备方便对机械手的控制元件进行降温隔尘,方便了机械手的运行稳定和方便夹紧等优点。
4.目前,用于自动化生产线的上下料机械手存在以下弊端:1、以往用于自动化生产线的上下料机械手无法根据实际工作需要进行升降调节,无法适配于不同的加工线;2、以往用于自动化生产线的上下料机械手不便于拆卸,无法对不同尺寸的夹料进行夹取。为此,我们提出一种自动机械手上下料生产线。
技术实现要素:
5.本实用新型的主要目的在于提供一种自动机械手上下料生产线,通过旋转把手,把手带动螺杆沿螺纹套内壁做螺纹旋转,通过螺纹套的螺纹配合将螺杆自身的旋转运动转换成升降运动,继而带动安装板做升降调节,可以有效解决背景技术中的问题。
6.为实现上述目的,本实用新型采取的技术方案为:
7.一种自动机械手上下料生产线,包括t形支撑杆,所述t形支撑杆,具体有两个且t形支撑杆,之间固定连接有横杆,所述横杆,中心位置镶嵌连接有螺纹套,所述螺纹套内侧壁螺纹连接有螺杆,所述螺杆下端固定连接有把手;所述t形支撑杆上端安装有伸缩机构;所述伸缩机构包括套管、限位槽、插管和限位块;所述套管两侧内壁开设有限位槽,所述插管插接于套管内部且插管两侧固定连接有限位块,所述限位块沿限位槽内部进行配合滑动;所述套管之间固定连接有安装板,所述安装板外表面开设有滑槽,所述安装板下端转动连接有螺杆。
8.进一步的,还包括夹取机构;所述夹取机构包括h形滑块、机械手、组装片和螺栓;
所述滑槽内部滑动连接有h形滑块,所述h 形滑块一侧可拆卸连接有机械手,且h形滑块另一侧固定连接有顶块;所述机械手两侧固定连接有组装片,所述组装片上贯插有螺栓且螺栓末端与安装板进行螺纹连接。
9.更进一步的,所述安装板后部外壁安装有液压缸,所述液压缸上端安装有活塞杆,所述活塞杆顶端固定连接有顶块。
10.与现有技术相比,本实用新型具有如下有益效果1、通过旋转把手,把手带动螺杆沿螺纹套内壁做螺纹旋转,通过螺纹套的螺纹配合将螺杆自身的旋转运动转换成升降运动,继而带动安装板做升降调节,与此同时通过设计有伸缩机构,伸缩机构包括套管、限位槽、插管和限位块,在安装板升降过程中,安装板两侧的套管沿插管外壁进行上下伸缩,插管两侧的限位块沿限位槽内部进行配合滑动,对套管和插管之间的运动进行限位,解决了以往用于自动化生产线的上下料机械手无法根据实际工作需要进行升降调节、无法适配于不同的加工线的问题;2、通过设计有夹取机构,夹取机构包括h形滑块、机械手、组装片和螺栓,通过使用相关工具将螺栓与安装板之间进行拆分,继而将机械手从设备上拆下,方便更换不同尺寸的机械手臂,解决了以往用于自动化生产线的上下料机械手不便于拆卸、无法对不同尺寸的夹料进行夹取的问题;通过按动液压缸开关,液压缸工作推动活塞杆伸缩,活塞杆带动顶块及其所连接的夹取机构上下移动,h形滑块沿滑槽内部稳定滑动,机械手可以智能化夹取物品。
附图说明
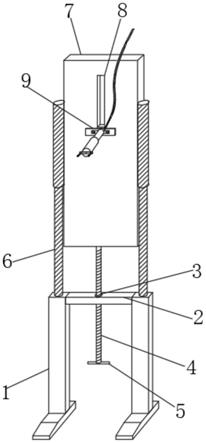
11.图1为本实用新型一种自动机械手上下料生产线的整体结构示意图。
12.图2为本实用新型一种自动机械手上下料生产线的夹取机构剖视示意图。
13.图3为本实用新型一种自动机械手上下料生产线的伸缩机构结构示意图。
14.图中:1、t形支撑杆;2、横杆;3、螺纹套;4、螺杆;5、把手;6、伸缩机构;601、套管;602、限位槽;603、插管;604、限位块;7、安装板;8、滑槽;9、夹取机构;901、h形滑块;902、机械手;903、组装片;904、螺栓;10、顶块;11、活塞杆;12、液压缸。
具体实施方式
15.为使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本实用新型。
16.如图1-3所示,一种自动机械手上下料生产线,包括t形支撑杆1,还包括伸缩机构6和夹取机构9,所述t形支撑杆1具体有两个且t形支撑杆1之间固定连接有横杆2,所述横杆2中心位置镶嵌连接有螺纹套3,所述螺纹套3内侧壁螺纹连接有螺杆4,所述螺杆4下端固定连接有把手5,所述t形支撑杆1上端安装有伸缩机构6,所述伸缩机构6包括套管601、限位槽602、插管603 和限位块604,所述套管601之间固定连接有安装板7,所述安装板7外表面开设有滑槽8,所述夹取机构9包括h形滑块901、机械手902、组装片903和螺栓904,所述安装板7下端转动连接有螺杆4。
17.其中,所述套管601两侧内壁开设有限位槽602,所述插管603 插接于套管601内部且插管603两侧固定连接有限位块604,所述限位块604沿限位槽602内部进行配合滑动;在安装板7升降过程中,安装板7两侧的套管601沿插管603外壁进行上下伸缩,插管 603两侧
的限位块604沿限位槽602内部进行配合滑动,对套管601 和插管603之间的运动进行限位。
18.其中,所述安装板7后部外壁安装有液压缸12,所述液压缸 12上端安装有活塞杆11,所述活塞杆11顶端固定连接有顶块10;通过按动液压缸12开关,液压缸12工作推动活塞杆11伸缩,活塞杆11带动顶块10及其所连接的夹取机构9上下移动。
19.其中,所述滑槽8内部滑动连接有h形滑块901,所述h形滑块901一侧可拆卸连接有机械手902,且h形滑块901另一侧固定连接有顶块10;h形滑块901沿滑槽8内部稳定滑动,机械手902 可以智能化夹取物品。
20.其中,所述机械手902两侧固定连接有组装片903,所述组装片903上贯插有螺栓904且螺栓904末端与安装板7进行螺纹连接;通过使用相关工具将螺栓904与安装板7之间进行拆分,继而将机械手902从设备上拆下,方便更换不同尺寸的机械手臂。
21.需要说明的是,本实用新型为一种自动机械手上下料生产线,工作时,通过旋转把手5,把手5带动螺杆4沿螺纹套3内壁做螺纹旋转,通过螺纹套3的螺纹配合将螺杆4自身的旋转运动转换成升降运动,继而带动安装板7做升降调节,与此同时通过设计有伸缩机构6,伸缩机构6包括套管601、限位槽602、插管603和限位块604,在安装板7升降过程中,安装板7两侧的套管601沿插管 603外壁进行上下伸缩,插管603两侧的限位块604沿限位槽602 内部进行配合滑动,对套管601和插管603之间的运动进行限位,解决了以往用于自动化生产线的上下料机械手无法根据实际工作需要进行升降调节、无法适配于不同的加工线的问题;通过设计有夹取机构9,夹取机构9包括h形滑块901、机械手902、组装片 903和螺栓904,通过使用相关工具将螺栓904与安装板7之间进行拆分,继而将机械手902从设备上拆下,方便更换不同尺寸的机械手臂,解决了以往用于自动化生产线的上下料机械手不便于拆卸、无法对不同尺寸的夹料进行夹取的问题;通过按动液压缸12 开关,液压缸12工作推动活塞杆11伸缩,活塞杆11带动顶块10 及其所连接的夹取机构9上下移动,h形滑块901沿滑槽8内部稳定滑动,机械手902可以智能化夹取物品。
22.以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1