基于脑电波以及语音识别的移动机器人的制作方法
1.本实用新型属于一般的控制或调节系统技术领域,尤其涉及基于脑电波以及语音识别的移动机器人。
背景技术:
2.随着现代科技的不断发展,意念控制已经走入现实生活中。“意念”控制,是利用人类的脑波操控。人类在进行各项生理活动时,大脑会产生电压,也就是我们所称的脑电波。人在不同状态下,脑电波的频率可以分为α、β、θ、δ波。脑机接口技术就是通过对脑电信息的分析解读,将其进一步转化成相应的控制,达到“意念”操控物体。
3.随着机器人技术的不断进步,机器人能够半自主或全自主地独立完成各项工作,机器人无论是在日常生活中,还是在工业、农业生产活动中都扮演者越来越重要的角色;现有的移动机器人缺少移动速度控制的方案。
4.因此,亟需一种能控制移动机器人移动速度的技术方案。
技术实现要素:
5.本实用新型的目的在于:针对现有技术的不足,而提供一种基于脑电波以及语音识别的移动机器人,以解决现有移动机器人移动速度控制的问题。
6.为了实现上述目的,本实用新型采用以下技术方案:
7.基于脑电波以及语音识别的移动机器人,包括机器人本体,所述机器人本体在顶面设置有麦克风阵列以及充电支架,所述充电支架的充电端上可拆卸安装地设置有脑电波采集装置,所述机器人本体在全周面设置有激光雷达,所述机器人本体在两侧设置有扬声器,所述机器人本体在底面设置有移动装置,所述机器人本体在内部设置有控制处理器、第一电源、第一无线通讯器以及语音识别器,所述控制处理器分别与所述麦克风阵列、所述第一电源、所述激光雷达、所述扬声器、所述移动装置、所述第一无线通讯器以及所述语音识别器电连接,所述脑电波采集装置在下面设置有接触电极,所述脑电波采集装置在内部设置有第二电源、脑电波信号处理模块以及第二无线通讯器,所述脑电波信号处理模块分别与所述第二电源、所述接触电极以及所述第二无线通讯器电连接,所述第一电源通过所述充电端与所述第二电源电连接,所述第一无线通讯器与所述第二无线通讯器通讯连接。
8.作为本实用新型所述的基于脑电波以及语音识别的移动机器人的优选方案,所述机器人本体在顶面还设置有与所述控制处理器电连接的可触摸显示器。
9.作为本实用新型所述的基于脑电波以及语音识别的移动机器人的优选方案,所述机器人本体在顶面设置有操作凸台,所述麦克风阵列以及所述可触摸显示器均设置在所述操作凸台的顶面。
10.作为本实用新型所述的基于脑电波以及语音识别的移动机器人的优选方案,所述激光雷达为多线激光雷达。
11.作为本实用新型所述的基于脑电波以及语音识别的移动机器人的优选方案,所述
激光雷达为十六线激光雷达、三十二线激光雷达或者六十四线激光雷达。
12.作为本实用新型所述的基于脑电波以及语音识别的移动机器人的优选方案,所述第一无线通讯器为蓝牙通讯器、wifi通讯器、4g通讯器或者5g通讯器。
13.作为本实用新型所述的基于脑电波以及语音识别的移动机器人的优选方案,所述第二无线通讯器为蓝牙通讯器、wifi通讯器、4g通讯器或者5g通讯器。
14.作为本实用新型所述的基于脑电波以及语音识别的移动机器人的优选方案,所述机器人本体在内部设置有与所述控制处理器电连接的数据存储器。
15.作为本实用新型所述的基于脑电波以及语音识别的移动机器人的优选方案,所述数据存储器为rom、prom或者eprom。
16.作为本实用新型所述的基于脑电波以及语音识别的移动机器人的优选方案,所述移动装置为移动滚轮或者移动履带。
17.本实用新型至少具有以下有益效果:
18.1)本实用新型在脑电波采集装置上设置接触电极以及脑电波信号处理模块,使本实用新型能通过脑电波采集装置实时采集使用者的脑电波,从而能获取使用者的注意力状态,进而根据使用者的具体注意力状态调节移动装置的移动速度;
19.2)本实用新型通过设置麦克风阵列以及语音识别器,使机器人本体能识别使用者的语音命令,从而在通过注意力状态调节移动装置移动速度的基础上,再通过语音识别辅助控制;
20.3)本实用新型通过设置激光雷达,机器人本体具有自动避障功能,避免出现操作不当的碰撞事故,提高了安全性能。
附图说明
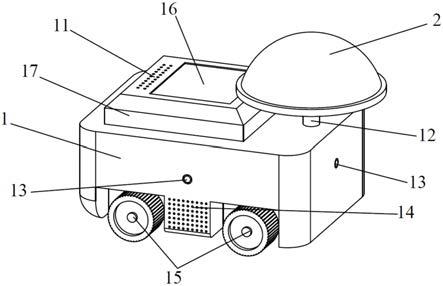
21.图1为本实用新型的结构示意图。
22.图2为本实用新型中脑电波采集装置为拆卸状态的结构示意图。
23.图3为本实用新型的原理框图。
24.图中:
25.1-机器人本体;
26.11-麦克风阵列;12-充电支架;121-充电端;13-激光雷达;14-扬声器;15-移动装置;16-可触摸显示器;17-操作凸台;
27.2-脑电波采集装置。
具体实施方式
28.为使本实用新型的技术方案和优点更加清楚,下面将结合具体实施方式和说明书附图,对本实用新型及其有益效果作进一步详细的描述,但本实用新型的实施方式不限于此。
29.在对本实用新型的技术方案进行详细说明之前,首先对脑电波信号以及语音控制的相关内容进行简要说明。
30.关于脑电波信号,通俗地讲,人类在进行各项生理活动时都在放电。心脏跳动时会产生1~2毫伏的电压,眼睛开闭会产生5~6毫伏的电压,而思考问题时大脑会产生0.2~1
毫伏的电压。如果用科学仪器测量大脑的电位活动,那么在荧幕上就会显示出波浪一样的图形,这就是“脑波”。脑波活动具有一定的规律性特征,和大脑的意识存在某种程度的对应关系。人在兴奋、紧张、昏迷等不同状态之下,脑电波的频率会有明显的不同,约在1~40赫兹之间,依照不同的频率,脑波又被进一步分为α、β、δ、θ波。当人在一定的压力之下精神高度集中时,脑波的频率在12~38赫兹之间,这个波段被称为β波,是“意识”层面的脑波;当人注意力下降,处于放松状态时,脑波的频率会下降到8~12赫兹,这被称为α波;进入睡眠状态后,脑波频率进一步下降,被分为θ波(4~8赫兹)和δ波(0.5~4赫兹),它们分别反映的是人在“潜意识”和“无意识”阶段的状态。正是因为脑波具有这种随着情绪波动而变化的特性,人类对于脑波的开发利用成为了可能。
31.脑机接口(brain computer interface,bci)即是采集脑波信号的设备,它是一种新颖的人机交换技术,通过计算机其和他电子设备在人脑与外界环境之间建立一条不依赖于外周神经和肌肉组织的对外信息交流控制通路。
32.例如,美国neurosky(中文简称:神念科技)公司即基于bci技术设计研发了一系列脑电设备,主要是通过干态电极传感器采集大脑产生的生物电信号,并将这些采集的信号送入tgam(thinkgear asic module)模块,tgam将混杂在信号中的噪音以及运动产生的扰动进行滤除,并将有用信号进行放大,然后通过该公司拥有的neurosky esemse专利算法解读出描述使用者当前精神状态的esemse参数(专注度、放松度),最终,通过将这些量化的参数输出到电脑、手机等智能设备,实现基于脑电波的人机交互,既通常所说的意念控制。
33.实施例
34.如图1至图3所示,基于脑电波以及语音识别的移动机器人,包括机器人本体1,机器人本体1在顶面设置有麦克风阵列11以及充电支架12,充电支架12的充电端121上可拆卸安装地设置有脑电波采集装置2,机器人本体1在全周面设置有激光雷达13,机器人本体1在两侧设置有扬声器14,机器人本体1在底面设置有移动装置15,机器人本体1在内部设置有控制处理器、第一电源、第一无线通讯器以及语音识别器,控制处理器分别与麦克风阵列11、第一电源、激光雷达13、扬声器14、移动装置15、第一无线通讯器以及语音识别器电连接,脑电波采集装置2在下面设置有接触电极,脑电波采集装置2在内部设置有第二电源、脑电波信号处理模块以及第二无线通讯器,脑电波信号处理模块分别与第二电源、接触电极以及第二无线通讯器电连接,脑电波采集装置2在下面设置有与充电端121相应的充电口,第一电源通过充电端121以及充电口与第二电源电连接,即第二电源可通过第一电源补充电能,第一无线通讯器与第二无线通讯器通讯连接。其中,脑电波信号处理模块为neurosky公司的tgam模块,语音识别器为ld3320芯片,控制处理器为atmega128单片机,第一电源和第二电源均为蓄电池,麦克风阵列11可以将噪声环境中特定声音信号进行有效的增强,麦克风阵列11中的麦克风越多越容易实现更好的语音降噪和语音增强效果。
35.本实施例的工作原理:
36.1)首先,使用者将脑电波采集装置2从充电支架12上拆卸取下,并佩戴在头部;接触电极包括采集电极、接地电极和参考电极;在使用时将采集电极设置在用户额头的fp1处,fp1是脑电图检查常规中的一个位置,即左额极;而接地电极和参考电极则通过耳夹等方式设置在用户耳垂处;该三个电极通过脑电波信号处理模块的噪音过滤技术和信号处理技术等获取使用者的脑电波信号,并实时将使用者的脑电波信号通过第二无线通讯器传输
至机器人本体1;
37.2)随后,使用者可通过发出语音唤醒命令唤醒并启动机器人本体1,语音唤醒命令可以为“启动”或者“开机”等语音命令;机器人本体1通过麦克风阵列11采集使用者发出的语音命令,并通过语音识别器分析处理语音命令;
38.3)唤醒机器人本体1后,机器人本体1通过第一无线通讯器接收使用者的脑电波信号,并传输至控制处理器进行分析处理;当脑电波信号的频率为8~12赫兹的α波时,即使用者处于放松状态且注意力较差时,移动装置15带动机器人本体1缓慢移动,移动速度为0.5~1m/s;当脑电波信号的频率为12~38赫兹的β波时,即使用者处于紧张状态且注意力较集中时,移动装置15带动机器人本体1较快移动,移动速度为1~2m/s;
39.4)使用者在使用过程中,可通过发出语音方向命令控制机器人本体1的移动方向,语音方向命令可以为“左转”或者“右转”等语音命令;控制处理器分析后语音控制命令后,通过控制移动装置15转动角度,进而控制机器人本体1的移动方向,每次语音方向命令可令移动装置15转动10
°
;
40.5)在机器人本体1的移动过程中,激光雷达13实时检测机器人主体周边的环境是否存在障碍物;若检测到机器人主体距离障碍物过近,如距离为5cm,则扬声器14发出警告并停止移动装置15的运作;此时通过手动操作才能正常控制机器人本体1的移动。
41.本实施例至少具有以下有益效果:
42.1)本实施例在脑电波采集装置2上设置接触电极以及脑电波信号处理模块,使本实施例能通过脑电波采集装置2实时采集使用者的脑电波,从而能获取使用者的注意力状态,进而根据使用者的具体注意力状态调节移动装置15的移动速度;
43.2)本实施例通过设置麦克风阵列11以及语音识别器,使机器人本体1能识别使用者的语音命令,从而在通过注意力状态调节移动装置15移动速度的基础上,再通过语音识别辅助控制;
44.3)本实施例通过设置激光雷达13,机器人本体1具有自动避障功能,避免出现操作不当的碰撞事故,提高了安全性能。
45.优选地,机器人本体1在顶面还设置有与控制处理器电连接的可触摸显示器16。通过上述设置,使用者可通过可触摸显示器16手动操作控制机器人本体1。
46.优选地,机器人本体1在顶面设置有操作凸台17,麦克风阵列11以及可触摸显示器16均设置在操作凸台17的顶面。通过上述设置,便于使用者手动操作控制机器人本体1。
47.优选地,激光雷达13为多线激光雷达。根据实际情况选择合适的激光雷达13。
48.优选地,激光雷达13为十六线激光雷达、三十二线激光雷达或者六十四线激光雷达。根据实际情况选择合适的激光雷达13。
49.优选地,第一无线通讯器为蓝牙通讯器、wifi通讯器、4g通讯器或者5g通讯器。根据实际情况选择合适的无线通讯器。
50.优选地,第二无线通讯器为蓝牙通讯器、wifi通讯器、4g通讯器或者5g通讯器。根据实际情况选择合适的无线通讯器。
51.优选地,机器人本体1在内部设置有与控制处理器电连接的数据存储器。通过上述设置,使机器人本体1具有数据存储功能。
52.优选地,数据存储器为rom、prom或者eprom。根据实际情况选择合适的数据存储
器。
53.优选地,移动装置15为移动滚轮或者移动履带。根据实际情况选择合适的移动装置15。
54.根据上述说明书的揭示和教导,本实用新型所属领域的技术人员还能够对上述实施方式进行变更和修改。因此,本实用新型并不局限于上述的具体实施方式,凡是本领域技术人员在本实用新型的基础上所作出的任何显而易见的改进、替换或变型均属于本实用新型的保护范围。此外,尽管本说明书中使用了一些特定的术语,但这些术语只是为了方便说明,并不对本实用新型构成任何限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1