一种多功能自动抓取机械臂
1.本实用新型公开了一种多功能自动抓取机械臂,涉及智能机械臂技术领域。
背景技术:
2.在工业生产自动化、智能化的大背景下,以工业机械臂为代表的工业机器人在工控产业中的应用越来越普遍,在抓取速度和抓取精度已达到成熟的技术研究上,结合疫情发展和人机交互的安全性等背景下,对机械臂的要求越来越高,为拓展机械臂的功能性和多元性带来了更多的思路。
3.现有技术中,机械臂功能单一,对工作场景没有相应检测功能,影响抓取效果,也难以适应多种不同的应用场景。
技术实现要素:
4.本实用新型针对上述背景技术中的缺陷,提供一种多功能自动抓取机械臂,提升工业控制领域机械臂的多功能性、安全性和应用性。
5.为实现上述目的,本实用新型采用的技术方案如下:一种多功能自动抓取机械臂,包括:底座、机械臂、fpga平台和上位机,所述机械臂和fpga平台连接于底座上,所述机械臂上安装摄像头模块,所述底座一侧设置led补光模块,所述上位机、机械臂、摄像模块和led补光模块均与fpga平台电性连接,所述的fpga平台电性连接上位机;fpga平台是一类高集成度的可编程逻辑器件,以硬件描述语言为基础的硬件开发平台,在本实用新型中用于物体图像的采集和处理和各类器件控制,从而自动识别到物体位置,并处理和传输多种功能模块的监测数据;具有成本小、体积小、处理速度快的优势;所述上位机用于接收fpga传送的摄像头监测的图像信息、工作环境的温湿度数据、光数据、任务完成情况,便于检验机械臂的工作状态;同时通过上位机程序规划机械臂的活动动作。
6.进一步的,所述机械臂设置在底座的中央,所述的fpga平台和led补光模块设置在机械臂的侧边,摄像模块可配合cmos数字式图像传感器ov5640和ov7670以及xt2010扫描模块组成的视觉检测组合,首先自动开始检测物体放置的状态(物体出现在可检测范围中,能捕捉到物体),扫描开关接通进行识别,根据物体上条码或二维码包含的信息进行抓取后实现分类,且当检测物块在阴影中时或光强已经低于能自动识别的限度时,环境光传感器ap3216c将光数据传送到led补光模块,进行自动调光控制,提高抓取和识别的准确性。
7.进一步的,所述的fpga平台电性连接温湿度传感器,所述的温湿度传感器采用dht11,所述的fpga平台电性连接警报器模块,所述的警报器模块包括led灯和蜂鸣器;所述温湿度传感led灯和蜂鸣器设至在底座上,温湿度传感可以检测机械臂工作环境的温度和湿度,温度范围0~50℃,湿度范围20~90%rh,根据应用环境设定合理阈值,当高于设定阈值时,警报器模块led灯闪烁、蜂鸣器发出声音警报,保证工作环境的安全性。
8.进一步的,所述的fpga平台电性连接语音播报模块,所述的语音播报模块采用:wt588c,语音播报模块设置于底座上,该模块在完成一次目标抓取—放置后,在后台播报语
音,反馈机械臂的工作状态。
9.进一步的,所述fpga平台电性连接机械臂,所述的机械臂采用:六自由度金属结构滚轴航模舵机,包括:舵机一、舵机二、舵机三、舵机四、舵机五和舵机六;舵机一控制机械臂方向,可在水平面内实现360
°
旋转,舵机二~四控制臂节伸展,可在竖直平面可实现180
°
调整,舵机五控制机械爪的抬放,舵机六控制机械爪的开合程度;本技术可根据设置的程序数据实现机械臂在空间内的多方向运动。
10.进一步的,所述的fpga平台电性连接无线串口屏,所述的无线串口屏采用:dc80480m070_2111_0x(t/c/n),通过无线串口屏可以实现人为控制,根据应用需求在串口屏上添加不同的控制设置,可以设置自动模式和手动模式,可以手动控制机械臂的动作进行检修或测试参数,也可以远程的在串口屏上给出不同的操作流程如:物体码垛、物体转移和物品分类等等,同时可以在出现特殊情况时进行紧急制动。
11.进一步的,所述的fpga平台电性连接指纹识别模块,所述指纹识别模块采用as608,工作人员通过指纹识别在后台打开机械臂的工作权限,保证机械臂工作环境的安全性和操作可控性。
12.工作过程:
13.(1)将目标物体放入指定区域内,给机械臂供电,机械臂复位,机械臂负责人进行指纹识别打开权限,机械臂开始工作。
14.(2)首先摄像头和图像传感器自动开始检测物体放置的状态(物体出现在可检测范围中,能识别到物体),扫描模块开关接通进行识别,根据物体上条码或二维码包含的信息进行抓取、放置,且当目标物体在阴影中时或光强已经低于能自动识别的限度时,环境光传感器将工作环境的光数据传送到led补光模块,进行自动调光控制。
15.(3)机械臂工作期间,温湿度传感可以检测机械臂工作环境的温度和湿度,
16.根据应用环境设定合理阈值,当高于设定阈值时,警报器模块led灯闪烁、蜂鸣器发出声音警报。
17.(4)无线串口屏在机械臂工作中起到辅助作用,远程的在串口屏上给出不同的操作流程:物体码垛、物体转移和物品分类等,同时在出现特殊情况时做出紧急制动。根据应用需求在串口屏上添加不同的控制设置:自动模式和手动模式,同时手动控制机械臂的动作进行检修或参数测试。
18.(5)在完成一次抓取、放置后,语音播报模块在后台播报一次“工作正常”,同时将工作时的温湿度信息、环境光信息、任务完成情况在上位机上显示。
19.有益效果:1.本实用新型将对物体位置自动捕捉、无线触屏的辅助操作、音频播报、上位机上的数据显示、工作权限核验和温度光强的检测等多功能模块集合到fpga平台上,实现机械臂的多功能性控制,提高机械臂抓取的准确性,实现机械臂工作的多元化。2.本实用新型作为多功能的图像驱动智能机械臂,结合疫情情况和人机交互的安全性,不同模块的组合可以适应于多种应用场景,核酸样品检测、血液样品检测的分拣,减少交叉感染,提高分拣效率,或应用于物流公司的快递分拣,工业流水线上的物品分拣、工厂物品的搬运等。
附图说明
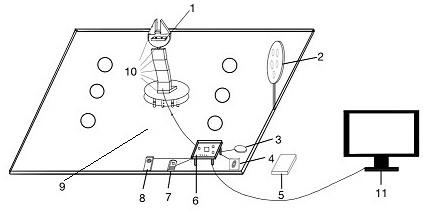
20.图1为本实用新型的结构示意图;
21.图2为本实用新型工作原理图。
具体实施方式
22.下面结合附图对技术方案的实施作进一步的详细描述。以下实施例仅用于更加清楚地说明本实用新型的技术方案,而不能以此来限制本实用新型的保护范围。
23.如图1所示的一种实施例,一种多功能自动抓取机械臂,包括:底座9、机械臂10、fpga平台6和上位机11,所述机械臂10和fpga平台6连接于底座9上,所述机械臂10上安装摄像头模块,所述底座9一侧设置led补光模块12,所述上位机11、机械臂10、摄像模块1和led补光模块12均与fpga平台6电性连接,所述的fpga平台6电性连接上位机11;fpga平台6是一类高集成度的可编程逻辑器件,以硬件描述语言为基础的硬件开发平台,在本实用新型中用于物体图像的采集、处理和各类器件控制,从而自动识别到物体位置,并处理和传输多种功能模块的监测数据;具有成本小、体积小、处理速度快的优势;所述上位机11用于接收fpga传送的摄像头监测的图像信息、工作环境的温湿度数据、光数据、任务完成情况,便于检验机械臂10的工作状态;同时通过上位机11程序规划机械臂10的活动动作。
24.所述机械臂10设置在底座9的中央,所述的fpga平台6和led补光模块12设置在机械臂10的侧边,摄像模块1可配合cmos数字式图像传感器ov5640和ov7670以及xt2010扫描模块组成的视觉检测组合,首先自动开始检测物体放置的状态(物体出现在可检测范围中,能捕捉到物体),扫描开关接通进行识别,根据物体上条码或二维码包含的信息进行抓取后实现分类,且当检测物块在阴影中时或光强已经低于能自动识别的限度时,环境光传感器ap3216c将光数据传送到led补光模块12,进行自动调光控制,提高抓取和识别的准确性。
25.所述的fpga平台6电性连接温湿度传感器3,所述的温湿度传感器3采用dht11,所述的fpga平台6电性连接警报器模块8,所述的警报器模块8包括led灯和蜂鸣器;温湿度传感可以检测机械臂10工作环境的温度和湿度,温度范围0~50℃,湿度范围20~90%rh,根据应用环境设定合理阈值,当高于设定阈值时,警报器模块8led灯闪烁、蜂鸣器发出声音警报,保证工作环境的安全性。
26.所述的fpga平台6电性连接语音播报模块7,所述的语音播报模块7采用:wt588c,该模块在完成一次目标抓取—放置后,在后台播报一次“工作正常”,反馈机械臂10的工作状态。
27.所述fpga平台6电性连接机械臂10,所述的机械臂10采用:六自由度金属结构滚轴航模舵机,包括:舵机一控制机械臂10方向,可在水平面内实现360
°
旋转,舵机二~四控制臂节伸展,可在竖直平面可实现180
°
调整,舵机五控制机械爪的抬放,舵机六控制机械爪的开合程度。根据设置的程序数据实现机械臂10在空间内的多方向运动。
28.所述的fpga平台6电性连接无线串口屏5,所述的无线串口屏5采用:dc80480m070_2111_0x(t/c/n),通过无线串口屏5可以实现人为控制,根据应用需求在串口屏上添加不同的控制设置,可以设置自动模式和手动模式,可以手动控制机械臂10的动作进行检修或测试参数,也可以远程的在串口屏上给出不同的操作流程如:物体码垛、物体转移和物品分类等等,同时可以在出现特殊情况时进行紧急制动。
29.所述的fpga平台6电性连接指纹识别模块4,所述指纹识别模块4采用as608,工作人员通过指纹识别在后台打开机械臂10的工作权限,保证机械臂10工作环境的安全性和操作可控性。
30.如图2所示,本实施例将无线串口屏的控制指令、摄像头的图像信息、补光模块探测到的环境光数据、温湿度传感器探测到的环境温湿度信息、权限人的身份数据整合到fpga平台后进行数据处理和传输,再将分析结果输出到语音播报模块、上位机、警报器模块中的的led灯和蜂鸣器、led补光模块进行结果反馈,以及根据程序控制机械臂舵机的动作。
31.本实用新型将对物体位置自动捕捉、无线触屏的辅助操作、音频播报、上位机上的数据显示、工作权限核验和温度光强的检测等多功能模块集合到fpga平台上,实现机械臂的多功能性控制,提高机械臂抓取的准确性,实现机械臂工作的多元化。
32.本实用新型当检测到温度或湿度高于某一阈值时自动警报、也可以通过无线串口屏进行人为操控以及对机械臂的启动进行权限设置,提高机械臂工作的安全性。
33.以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1