一种智能控制机械臂的制作方法
1.本实用新型涉及机械臂技术领域,尤其涉及一种智能控制机械臂。
背景技术:
2.机械臂是指高精度,多输入多输出、高度非线性、强耦合的复杂系统。因其独特的操作灵活性,已在工业装配、安全防爆等领域得到广泛应用。机械臂是一个复杂系统,存在着参数摄动、外界干扰及未建模动态等不确定性。因而机械臂的建模模型也存在着不确定性,对于不同的任务,需要规划机械臂关节空间的运动轨迹,从而级联构成末端位姿。
3.现有技术中,现有的机械臂由于基本的使用环境是在工厂的内部,其工作环境较差,内部较大,在生产过程中所产生的废屑较多,以至于在使用时会导致机械臂最前端机械手的位置会夹杂或沾染有灰尘或废屑,从而影响了在机械手部分的灰尘或废屑在夹持或加工的过程中带入至其他机械内部的问题。
技术实现要素:
4.本实用新型的目的是为了解决现有技术中存在机械臂由于基本的使用环境是在工厂的内部,其工作环境较差,内部较大,在生产过程中所产生的废屑较多,以至于在使用时会导致机械臂最前端机械手的位置会夹杂或沾染有灰尘或废屑,从而影响了在机械手部分的灰尘或废屑在夹持或加工的过程中带入至其他机械内部的问题,而提出的一种智能控制机械臂。
5.为了实现上述目的,本实用新型采用了如下技术方案:一种智能控制机械臂,包括驱动座、转动盘、臂架、活动轴、臂杆和活动架,所述转动盘活动安装在驱动座的顶部,所述臂架活动安装在转动盘的顶部,所述活动轴活动安装在臂架的顶部,所述臂杆一活动安装在活动轴的外壁,所述活动架的活动安装在臂杆一的顶部,所述活动架的顶部活动安装有臂杆二,所述臂杆二的一端活动安装有调节架,所述驱动座的底部固定安装有智能控制箱,所述智能控制箱的顶部固定安装有气泵,所述气泵的侧面固定安装有电机,所述气泵的一侧分别固定连接有进气口和出气口,所述出气口的一端固定连接有输气管,所述输气管的一端固定连接有转动座,所述转动座的一侧固定安装有喷头,所述转动座活动安装在调节架的顶部。
6.优选的,所述智能控制箱的内部固定安装有主板,所述智能控制箱的内部固定安装有无线传输器,所述智能控制箱的内部固定安装有扬声器,所述智能控制箱的内部固定安装有麦克风。
7.优选的,所述电机的顶部固定安装有控制盒,所述气泵的底部固定安装有减震底座,所述减震底座固定安装在气泵的底部和智能控制箱的顶部之间。
8.优选的,所述智能控制箱的内部设置有散热扇,所述智能控制箱的两端均匀开合有通风格栅。
9.优选的,所述臂杆二的另一端固定安装有动力设备,所述调节架的一端固定安装
有安装套。
10.优选的,所述智能控制箱的底部固定安装有固定座。
11.优选的,所述驱动座的侧面设置有驱动装置,所述活动轴的侧面设置有转动机。
12.与现有技术相比,本实用新型的优点和积极效果在于,
13.1、本实用新型中,通过设置有气泵,在气泵的侧面设置有电机,在气泵的侧面分别连接有进气口和出气口,在出气口的一端连接有输气管,将输气管顺着机械臂连接有转动座,在转动座的侧面安装有喷头,且输气管和喷头相连通,且气泵与智能控制箱之间电性连接,从而方便了通过智能控制箱对气泵进行智能控制,进而使得气泵与电机配合开始收集气体并进行增压,通过进气口吸入外部的控制,再通过出气口和输气管将增压的气体输送至喷头喷出,转动座则方便了对喷头的喷射角度进行调节,从而有利于高效率地将该机械臂的机械手部分利用气体喷射进行清理,从而有效地减少了机械手上的灰尘和废屑,提高了整体清洁度,有利于机械臂与其他周边机械正常且高效地进行工作。
14.2、本实用新型中,通过设置有智能控制箱,在智能控制箱的内部设置有主板,主板的内部设定有控制的数据,通过将其与设备之间进行电性连接,从而方便了对机械臂提供智能化控制效果,在智能控制箱的内部设置有无线传输器,通过其配合方便了对机械臂进行远程控制,通过设置有扬声器和麦克风则方便了对机械臂进行语音控制,从而有效地提高了操作的便捷度,进一步提高了控制的效率,通过在智能控制箱的内部安装有散热扇,并在智能控制箱的两端开设有通风格栅,从而方便了通过散热扇和通风格栅的配合对智能控制箱提供有效的散热效果。
附图说明
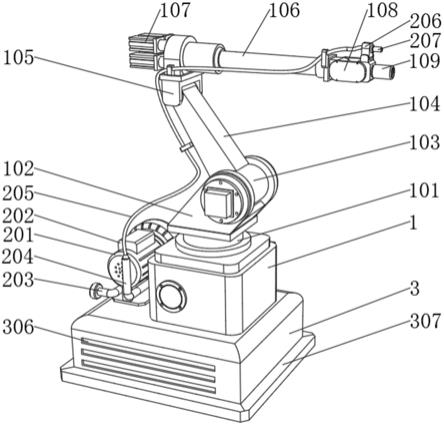
15.图1为本实用新型提出一种智能控制机械臂的整体结构示意图;
16.图2为本实用新型提出一种智能控制机械臂的立体侧视结构示意图;
17.图3为本实用新型提出一种智能控制机械臂的部分结构示意图;
18.图4为本实用新型提出一种智能控制机械臂的控制箱内部结构示意图。
19.图例说明:1、驱动座;2、气泵;3、智能控制箱;101、转动盘;102、臂架;103、活动轴;104、臂杆一;105、活动架;106、臂杆二;107、动力设备;108、调节架;109、安装套;201、电机;202、控制盒;203、进气口;204、出气口;205、输气管;206、转动座;207、喷头;301、主板;302、无线传输器;303、扬声器;304、麦克风;305、散热扇;306、通风格栅;307、固定座。
具体实施方式
20.为了能够更清楚地理解本实用新型的上述目的、特征和优点,下面结合附图和实施例对本实用新型做进一步说明。需要说明的是,在不冲突的情况下,本技术的实施例及实施例中的特征可以相互组合。
21.在下面的描述中阐述了很多具体细节以便于充分理解本实用新型,但是,本实用新型还可以采用不同于在此描述的其他方式来实施,因此,本实用新型并不限于下面公开说明书的具体实施例的限制。
22.实施例1,如图1-4所示,本实用新型提供了一种智能控制机械臂,包括驱动座1、转动盘101、臂架102、活动轴103、臂杆一104和活动架105,转动盘101活动安装在驱动座1的顶
部,臂架102活动安装在转动盘101的顶部,活动轴103活动安装在臂架102的顶部,臂杆一104活动安装在活动轴103的外壁,活动架105的活动安装在臂杆一104的顶部,活动架105的顶部活动安装有臂杆二106,臂杆二106的一端活动安装有调节架108,驱动座1的底部固定安装有智能控制箱3,智能控制箱3的顶部固定安装有气泵2,气泵2的侧面固定安装有电机201,气泵2的一侧分别固定连接有进气口203和出气口204,出气口204的一端固定连接有输气管205,输气管205的一端固定连接有转动座206,转动座206的一侧固定安装有喷头207,转动座206活动安装在调节架108的顶部。
23.下面具体说一下其气泵2和智能控制箱3的具体设置和作用。
24.如图1和图3所示,电机201的顶部固定安装有控制盒202,气泵2的底部固定安装有减震底座,减震底座固定安装在气泵2的底部和智能控制箱3的顶部之间,臂杆二106的另一端固定安装有动力设备107,调节架108的一端固定安装有安装套109,驱动座1的侧面设置有驱动装置,活动轴103的侧面设置有转动机。
25.其整个气泵2达到的效果为,通过在气泵2的侧面设置有电机201,在气泵2的侧面分别连接有进气口203和出气口204,在出气口204的一端连接有输气管205,将输气管205顺着机械臂连接有转动座206,在转动座206的侧面安装有喷头207,且输气管205和喷头207相连通,且气泵2与智能控制箱3之间电性连接,从而方便了通过智能控制箱3对气泵2进行智能控制,进而使得气泵2与电机201配合开始收集气体并进行增压,通过进气口203吸入外部的控制,再通过出气口204和输气管205将增压的气体输送至喷头207喷出,转动座206则方便了对喷头207的喷射角度进行调节,从而有利于高效率地将该机械臂的机械手部分利用气体喷射进行清理,从而有效地减少了机械手上的灰尘和废屑,提高了整体清洁度,有利于机械臂与其他周边机械正常且高效地进行工作,通过设置有控制盒202便于对电机201进行控制,通过转动盘101、活动轴103、臂杆一104、活动架105和臂杆二106方便了对整体进行转动调节以及支撑,通过调节架108则方便了对头段部位进行调节,通过安装套109则方便了快速拆装机械夹手或钻具等,提高了更换效率。
26.如图2和图4所示,智能控制箱3的内部固定安装有主板301,智能控制箱3的内部固定安装有无线传输器302,智能控制箱3的内部固定安装有扬声器303,智能控制箱3的内部固定安装有麦克风304,智能控制箱3的内部设置有散热扇305,智能控制箱3的两端均匀开合有通风格栅306,智能控制箱3的底部固定安装有固定座307。
27.其整个的智能控制箱3达到的效果为,通过在智能控制箱3的内部设置有主板301,主板301的内部设定有控制的数据,通过将其与设备之间进行电性连接,从而方便了对机械臂提供智能化控制效果,在智能控制箱3的内部设置有无线传输器302,通过其配合方便了对机械臂进行远程控制,通过设置有扬声器303和麦克风304则方便了对机械臂进行语音控制,从而有效地提高了操作的便捷度,进一步提高了控制的效率,通过在智能控制箱3的内部安装有散热扇305,并在智能控制箱3的两端开设有通风格栅306,从而方便了通过散热扇305和通风格栅306的配合对智能控制箱3提供有效的散热效果,通过安装有固定座307则则方便了对智能控制箱3进行安装固定。
28.工作原理:通过在气泵2的侧面设置有电机201,在气泵2的侧面分别连接有进气口203和出气口204,在出气口204的一端连接有输气管205,将输气管205顺着机械臂连接有转动座206,在转动座206的侧面安装有喷头207,且输气管205和喷头207相连通,且气泵2与智
能控制箱3之间电性连接,从而方便了通过智能控制箱3对气泵2进行智能控制,进而使得气泵2与电机201配合开始收集气体并进行增压,通过进气口203吸入外部的控制,再通过出气口204和输气管205将增压的气体输送至喷头207喷出,转动座206则方便了对喷头207的喷射角度进行调节,从而有利于高效率地将该机械臂的机械手部分利用气体喷射进行清理,从而有效地减少了机械手上的灰尘和废屑,提高了整体清洁度,有利于机械臂与其他周边机械正常且高效地进行工作,通过设置有控制盒202便于对电机201进行控制,通过转动盘101、活动轴103、臂杆一104、活动架105和臂杆二106方便了对整体进行转动调节以及支撑,通过调节架108则方便了对头段部位进行调节,通过安装套109则方便了快速拆装机械夹手或钻具等,提高了更换效率,通过在智能控制箱3的内部设置有主板301,主板301的内部设定有控制的数据,通过将其与设备之间进行电性连接,从而方便了对机械臂提供智能化控制效果,在智能控制箱3的内部设置有无线传输器302,通过其配合方便了对机械臂进行远程控制,通过设置有扬声器303和麦克风304则方便了对机械臂进行语音控制,从而有效地提高了操作的便捷度,进一步提高了控制的效率,通过在智能控制箱3的内部安装有散热扇305,并在智能控制箱3的两端开设有通风格栅306,从而方便了通过散热扇305和通风格栅306的配合对智能控制箱3提供有效的散热效果,通过安装有固定座307则则方便了对智能控制箱3进行安装固定。
29.以上所述,仅是本实用新型的较佳实施例而已,并非是对本实用新型作其它形式的限制,任何熟悉本专业的技术人员可能利用上述揭示的技术内容加以变更或改型为等同变化的等效实施例应用于其它领域,但是凡是未脱离本实用新型技术方案内容,依据本实用新型的技术实质对以上实施例所作的任何简单修改、等同变化与改型,仍属于本实用新型技术方案的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1