一种机器人操作杆控制装置的制作方法
1.本实用新型涉及串并联式眼科手术机器人,特别是涉及一种机器人上用于控制移动定位的操作杆控制装置。
背景技术:
2.随着自动化技术的不断发展,自动机器人被应用至各行各业。如在医疗行业中,眼科手术机器人就是一种新型的医疗器械,其能协助医生完成白内障、眼底黄斑、视网膜、青光眼等眼科手术。视不同的工作内容,机器人的机械手需要在设定行程范围内进行移动,以及满足多个方向的转向要求,且机械手的移动必须满足相应的精度要求。但现有机器人上的精度控制装置结构都较为复杂且操作繁琐,无论生产还是维护的成本都较为高昂,操作人员学习的周期也较长,使用方便性低。
技术实现要素:
3.本实用新型的目的在于提供一种结构简单且控制精度高的机器人操作杆控制装置,以保证控制精度的同时简化设备结构,降低操作难度和生产、维护以及学习的成本。
4.本实用新型所述的机器人操作杆控制装置,包括底座,铰接于底座上的外旋转座,铰接于外旋转座上的内旋转座,和可相对内旋转座作直线移动的移动座,另有设置于内旋转座之外的摇杆,摇杆通过连杆与移动座固定连接;底座与外旋转座之间、外旋转座与内旋转座之间分别设置有检测旋转角度的角度检测器,内旋转座与移动座之间设置有检测位移量的移位检测器。
5.所述机器人操作杆控制装置,底座上设有两个相对设置的侧板,外旋转座安装于两块侧板的相对侧内;所述外旋转座和内旋转座均呈环形设置,内旋转座安装于外旋转座的环形内侧,且外旋转座和内旋转座的旋转轴线相互垂直,移动座的移动方向与内旋转座的轴线方向相互垂直。另外,底座与外旋转座之间、外旋转座与内旋转座之间设置有提供阻尼作用的旋转阻尼器,而摇杆或移动座与内旋转座之间设置有提供阻尼作用的位移阻尼器。
6.本实用新型所述的机器人操作杆控制装置,底座、外旋转座和内旋转座三者构成三维坐标系统,底座作为坐标系的第一轴,外旋转座作为坐标系的第二轴,内旋转座则作为坐标系的第三轴,内旋转座上还设置有可移动的移动座和安装于移动座上的摇杆;其中,内旋转座设置于外旋转座的内侧,而外旋转座设置于底座的内侧,底座则具有较大的体积和重量,使整个操作杆控制装置的重心位于底座上,以提高装置的平稳性;在机器人工作时,底座、外旋转座、内旋转座和移动座相对运动,且运动过程中角度检测器检测外旋转座和内旋转座的旋转角度,同时,旋转阻尼器和位移阻尼器对相对运动的零部件提供阻尼作用,而移位检测器则检测移动座的位移量,由此准确控制操作杆的移动。该机器人操作杆控制装置的控制精度极高,且结构简单,有利于简化设备结构,降低所需的操作难度,提高学习和使用方便性,并降低生产和维护的成本。
附图说明
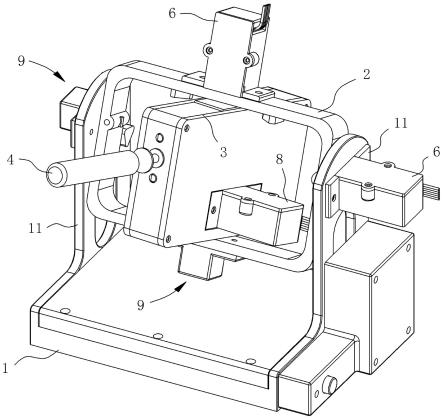
7.图1是机器人操作杆控制装置的结构示意图。
8.图2是底座与外旋转座的连接结构示意图。
9.图3是外旋转座与内旋转座的连接结构示意图。
10.图4、5是内旋转座、移动座、摇杆及移位检测器的连接结构示意图。
11.图6是旋转阻尼器的其中一种实施方式的结构示意图。
12.图7是移位阻尼器的其中一种实施方式的结构示意图。
具体实施方式
13.一种机器人操作杆控制装置,包括底座1,铰接于底座上的外旋转座2,铰接于外旋转座上的内旋转座3,和可相对内旋转座作直线移动的移动座7,另有设置于内旋转座之外的摇杆4,摇杆通过连杆5与移动座固定连接;底座与外旋转座之间、外旋转座与内旋转座之间分别设置有检测旋转角度的角度检测器6,内旋转座与移动座之间设置有检测位移量的移位检测器8。
14.所述机器人操作杆控制装置,底座1上设有两个相对设置的侧板11,外旋转座2安装于两块侧板的相对侧内;所述外旋转座2和内旋转座3均呈环形设置,内旋转座3安装于外旋转座的环形内侧,且外旋转座2和内旋转座3的旋转轴线相互垂直,移动座7安装于内旋转座3的环形内侧且其移动方向与内旋转座的轴线方向相互垂直;另外,内旋转座3上安装有导杆31,移动座7套于导杆上,以使移动座的运动更加平稳、准确;还有,底座1上安装有限制外旋转座2转动角度的外限位块12,外限位块对外旋转座的限位角度为115
°
,使外旋转座可以绕旋转轴线进行0~115
°
旋转;而外旋转座2上安装有限制内旋转座3转动角度的内限位块21,内限位块对内旋转座的限位角度为100
°
,使内旋转座可以绕旋转轴线进行-50
°
~50
°
旋转。
15.底座、外旋转座和内旋转座三者构成三维坐标系统,底座作为坐标系的第一轴,外旋转座作为坐标系的第二轴,内旋转座则作为坐标系的第三轴,内旋转座上还设置有可移动的移动座和安装于移动座上的摇杆;其中,内旋转座设置于外旋转座的内侧,而外旋转座设置于底座的内侧,底座则具有较大的体积和重量,使整个操作杆控制装置的重心位于底座上,以提高装置的平稳性;在机器人工作时,底座、外旋转座、内旋转座和移动座相对运动,且运动过程中角度检测器检测外旋转座和内旋转座的旋转角度,移位检测器则检测移动座的位移量,由此准确控制操作杆的移动。
16.所述机器人操作杆控制装置,底座1与外旋转座2之间、外旋转座与内旋转座3之间设置有提供阻尼作用的旋转阻尼器9,摇杆4或移动座7与内旋转座3之间设置有提供阻尼作用的位移阻尼器,通过旋转阻尼器和位移阻尼器对相对运动的零部件提供阻尼作用,既可以提供缓冲并保护零部件,也可以使零部件的相对运动更加平稳以提高定位精度。
17.其中,旋转阻尼器可以是用于相互铰接的阻尼转轴,阻尼转轴上相对转动的两端分别固定安装于底座1和外旋转座2,或分别固定安装于外旋转座2和内旋转座3上,从而利用阻尼转轴的特性为相互铰接的两个零部件提供阻尼作用,其结构简单;旋转阻尼器也可以如图6所示,包括设置于底座1与外旋转座2之间、外旋转座与内旋转座3之间的连接轴91,连接轴的一端固定于外旋转座或内旋转座上,另一端穿过底座或外旋转座的外壁并套有阻
尼胶圈92,底座或外旋转座的外壁上固定安装有胶圈固定件93,胶圈固定件上设有套于阻尼胶圈外侧并可收缩的调节环94,调节环上螺接有控制调节环收缩程度以夹紧阻尼胶圈的盖体95,通过拧动盖体使调节环压缩阻尼胶圈,阻尼胶圈通过不同的形变程度抱紧连接轴以提供不同程度的阻尼作用,这可以更加方便地调节阻尼力度,从而使工作更加准确,并满足不同的使用要求。
18.位移阻尼器可以如图4所示,为设置于移动座7与导杆31之间的轴套10,通过轴套与导杆的摩擦提供适合的阻尼,其工作稳定且有利于降低结构复杂性;除此之外也可以如图7所示,连杆5穿过内旋转座3的外壁,位移阻尼器包括套于连杆上的阻尼胶圈和固定安装于内旋转座上的胶圈固定件93,胶圈固定件上设有套于阻尼胶圈外侧并可收缩的调节环,调节环上螺接有控制调节环收缩程度以夹紧阻尼胶圈的盖体95,该种位移阻尼器的结构与旋转阻尼器的其中一种实施方式相同,通过阻尼胶圈抱紧连杆而提供阻尼作用。
19.如图2、3所示,角度检测器6包括设置于底座1与外旋转座2之间,或外旋转座与内旋转座3之间的转轴20,转轴的一端通过联轴器30连接有编码器40,通过编码器旋转圈数即可得出转动角度,其结构简单且检测精度高,可满足机器人移动的精度要求并降低结构复杂性。而移位检测器8则如图4、5所示,包括固定安装于移动座7上的齿条81,通过转轴20铰接于内旋转座3上并与齿条啮合的齿轮82,转轴的一端通过联轴器30连接有编码器40,其将移动座和齿条的直线移动转变为齿轮的转动后再由编码器检测,以计算移动座的位移量。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1