一种机器人拖动示教杆机构的喷涂设备的制作方法
1.本实用新型属于喷涂设备,特别涉及一种机器人拖动示教杆机构的喷涂设备。
背景技术:
2.随着科技的发展,航天军工对于机器人自动喷涂有迫切的需求,但是目前产品喷涂主要还是通过人工完成,喷涂效率低,喷漆质量一致性较差,操作者劳动强度大,职业病危害严重。近年来,随着工业机器人领域的发展,工业机器人相对于人工具有成本低、可靠性高、柔性好、智能化、效率高等优点。在产品喷涂中广泛采用机器人,不仅可以提高产品生产的效率、喷涂质量,而且可以减低操作者劳动强度、减少职业病危害。
3.在机器人自动喷涂领域中,示教的质量直接影响批量生产的产品质量,实现快速直观高精度的示教与再现对于生产有着重大意义。目前常用的示教方法有示教器示教、软件离线示教、协作机器人拖动示教等方法。示教器示教操作直观,但示教操作复杂,时间较长,并且需要停产进行示教,影响生产效率且危险性较大。软件离线示教不需要停产示教,但需要三维模型具有较高的准确性,对操作者的技能水平和学习时间成本要求高,提高了使用难度。协作机器人拖动示教操作简单、直观,但因限制了本体质量、刚度、速度和臂展,无法满足各种工况、负载的使用场景,局限于小型、轻量型、小范围生产应用。相应的,本领域存在着发展一种无须示教器和软件离线编程即可获得轨迹的基于拖动示教杆机构的机器人喷涂设备及方法的技术需求。
技术实现要素:
4.本发明目的在于解决上述技术问题,提供一种桁架x梁上面装有桁架y梁,在桁架y梁上面装机器人和拖动示教杆机构,通过自动控制,实现对产品的喷涂质量好、效率高、劳动强度低,减少职业病危害的一种机器人拖动示教杆机构的喷涂设备。
5.本实用新型解决技术问题所采用的技术方案是:一种机器人拖动示教杆机构的喷涂设备,包括由多个桁架立柱,在桁架立柱上端固定两个平行的桁架x梁,其特征在于在桁架x梁的上面装有导轨一,导轨一上面固定有齿条一;齿条一上面装有左右移动的桁架y梁,桁架y梁中间设有通孔滑道上面两侧固定有齿条二;在通孔滑道中装机器人和拖动示教杆机构,机器人和拖动示教杆固定在机器人拖动示教杆机构固定座上,在通孔滑道中前后移动。
6.所述的机器人,包括机器人固定在桁架底座上,机器人的前手臂上固定喷枪。
7.所述的拖动示教杆机构,包括拖动示教杆,拖动示教杆下端与拖动示教杆三轴中的轴套二固定连接;拖动示教杆三轴右端为主轴,主轴与轴套二之间装有轴套一;轴套一与连接杆下端连接,连接杆上端与拖动示教杆二轴固定连接,拖动示教杆二轴的左端装有拖动示教杆一轴;拖动示教杆一轴上装有拖动示教杆防爆接头座;拖动示教杆的上端与拖动示教杆四轴固定连接;拖动示教杆四轴左端固定有拖动示教杆五轴和拖动示教杆六轴;拖动示教杆六轴装在拖动示教杆六轴轴座一上;拖动示教杆六轴轴座一固定有手柄定位机
构,手柄定位机构有手柄臂座,手柄臂座的外侧固定有手柄臂;手柄臂内端用螺钉固定有加强块,外端前面固定手柄,后面固定拖动示教控制盒;左面的拖动示教控制盒上装有拖教开关、喷枪开关和桁架x梁右向运动开关,右侧的拖动示教控制盒上装有桁架x梁左向运动开关、桁架y梁前向运动开关和桁架y梁后向运动开关;拖动示教杆六轴轴座一下面装有拖动示教杆六轴轴座二,拖动示教杆六轴轴座二下面装有喷枪快换座,喷枪快换座上装有喷枪。
8.本实用新型的有益效果是:该实用新型对产品喷涂质量高,提高了生产效率,自动化程度高,适用范围广,减轻了劳动强度,减少了职业病的危害。
附图说明
9.以下结合附图,以实施例具体说明。
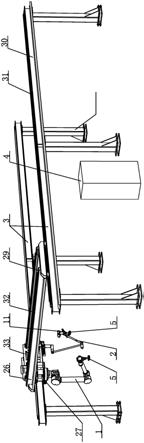
10.图1是一种机器人拖动示教杆机构的喷涂设备的三维图;
11.图2是图1中拖动示教杆机构的三维图;
12.图3是图2中拖动示教杆机构的喷头、示教杆四轴、五轴、拖动示教控制盒等部件的三维图。
13.图中:1-机器人;2-拖动示教杆机构;2-1-拖动示教杆;3-桁架x梁;4-电气控制箱;5-喷枪;6-拖动示教控制盒;7-拖动示教杆防爆接头座;8-拖动示教杆一轴;9-拖动示教杆二轴;10-拖动示教杆三轴;10-1-主轴;10-2-轴套一;10-3-轴套二;11-拖动示教杆四轴;12-拖动示教杆五轴;13-拖动示教杆六轴;14-拖教开关;15-喷枪开关;16-桁架x梁右向运动开关;17-桁架x梁左向运动开关;18-桁架y梁前向运动开关;19-桁架y梁后向运动开关;20-手柄;21-喷枪快换座;22-连接杆;23-手柄定位机构;23-1-手柄臂;23-2-加强块;23-3-手柄臂座;24-拖动示教杆六轴轴座一;25-拖动示教杆六轴轴座二;26-桁架y梁;27-桁架底座;28-桁架立柱;29-通孔滑道;30-导轨一;31-齿条一;32-齿条二;33-机器人拖动示教杆机构固定座。
具体实施方式
14.实施例,参照附图,一种机器人拖动示教杆机构的喷涂设备,包括由六个桁架立柱28,在桁架立柱28上端固定两个平行的桁架x梁3,其特征在于在桁架x梁3的上面装有导轨一30,导轨一30上面固定有齿条一31;齿条一31上面装有左右移动的桁架y梁26,桁架y梁26中间设有通孔滑道29上面两侧固定有齿条二32;在通孔滑道29中装机器人1和拖动示教杆机构2,机器人1和拖动示教杆2固定在机器人拖动示教杆机构固定座33上,在通孔滑道29中前后移动。
15.所述的机器人1,包括机器人1固定在桁架底座27上,机器人1的前手臂上固定喷枪5。
16.所述的拖动示教杆机构2,包括拖动示教杆2-1,拖动示教杆2-1下端与拖动示教杆三轴10中的轴套二10-3固定连接;拖动示教杆三轴10右端为主轴10-1,主轴10-1与轴套二10-3之间装有轴套一10-2;轴套一10-2与连接杆22下端连接,连接杆22上端与拖动示教杆二轴9固定连接,拖动示教杆二轴9的左端装有拖动示教杆一轴8;拖动示教杆一轴8上装有拖动示教杆防爆接头座7;拖动示教杆2-1的上端与拖动示教杆四轴11固定连接;拖动示教杆四轴11右端固定有拖动示教杆五轴12和拖动示教杆六轴13;拖动示教杆六轴13装在拖动
示教杆六轴轴座一24上;拖动示教杆六轴轴座一24固定有手柄定位机构23,手柄定位机构23有手柄臂座23-3,手柄臂座23-3的外侧固定有手柄臂23-1;手柄臂23-1内端用螺钉固定有加强块23-2,外端前面固定手柄20,后面固定拖动示教控制盒6;左面的拖动示教控制盒6上装有拖教开关14、喷枪开关15和桁架x梁右向运动开关16,右侧的拖动示教控制盒6上装有桁架x梁左向运动开关17、桁架y梁前向运动开关18和桁架y梁后向运动开关19;拖动示教杆六轴轴座一24下面装有拖动示教杆六轴轴座二25,拖动示教杆六轴轴座二25下面装有喷枪快换座21,喷枪快换座21上装有喷枪5。
17.本实用新型的操作方法是,采取以下步骤:
18.1.人工手持手柄20,将拖动示教杆机构2和机器人1拖动至于示教起始位置,按下拖教开关14,电气控制箱4中的自动控制电路开始记录示教轨迹;
19.2.示教过程:拖动示教杆机构2将整个动作过程中拖动示教杆2-1动作姿态数据、喷枪5的喷枪开关15、桁架y梁26和机器人拖动示教杆机构固定座33的移动信号实时发送给电气控制箱4中的自动控制电路,采用预先编制的程序进行自动控制;人工打开喷枪开关15对工件进行自动喷涂;
20.3.对工件喷涂时,人工操作桁架x梁右向运动开关16、桁架x梁左向运动开关17、桁架y梁前向运动开关18和桁架y梁后向运动开关19对工件进行喷涂;
21.4.工件喷涂完成后再次按动喷枪开关15,取下工件,进行下次喷涂。
22.本喷涂设备中的桁架y梁26的前后移动由一个伺服电机、驱动减速器,减速器带动在机器人拖动示教杆机构固定座33下面装的齿轮与齿轮条32啮合,驱动机器人拖动示教杆机构固定座33下面装的机器人1和拖动示教杆机构2前后移动。同样桁架y梁26在桁架x梁3的齿条一31上左右移动,由另一个伺服电机、驱动减速器,减速器带动在桁架y梁26两端下面装齿轮与齿条一31啮合传动。
23.在桁架x梁3中间的桁架立柱28左侧装有电气控制箱4,电气控制箱4中装有自动控制电路,设备中的伺服电机、喷枪5、拖动示教控制盒6中的电气元件均用导线与电气控制箱4的自动控制电路连通,并根据预先编程,进行自动控制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1