受驱动的线性轴和工业机器人的制作方法
受驱动的线性轴和工业机器人
1.相关申请的交叉引用
2.本专利申请要求德国专利申请de 10 2020 119 499.4的优先权,其公开内容通过引用并入本文。
技术领域
3.本发明涉及一种受驱动的线性轴,其作为用于工业机器人的机器人臂的机器人基座。本发明还涉及一种工业机器人。
背景技术:
4.线性轴在自动化技术中大量使用并且通常具有可由齿形带驱动的滑座。为了受驱动的线性轴的齿形带,在此使用外部电动机,所述外部电动机通常通过传动装置减速地耦合到齿形带上。在此有问题的是,驱动装置,即电动机或传动装置从轴伸出并且构造得比较大。
5.当受驱动的线性轴应用作工业机器人的机器人基座时,这是特别不利的。通过以受驱动的线性轴作为机器人基座的扩展,工业机器人可以附加地执行线性运动。为了将受驱动的线性轴最佳地集成到工业机器人中,必须在线性轴的滑座上提供工业机器人所需的所有介质。
技术实现要素:
6.本发明的目的是提供一种作为用于工业机器人的机器人基座的受驱动的线性轴和相应的工业机器人,其结构简单并且具有很小的空间需求。
7.本发明的目的借助于根据独立权利要求所述的受驱动的线性轴或工业机器人来实现。本发明的有利的改进方案、附加的特征和/或优点由从属权利要求和下面的描述得出。
8.所述受驱动的线性轴具有壳体,所述壳体具有线性的轨道引导件,在所述线性的轨道引导件上布置有滑座,所述滑座借助于运输装置可线性地往复运动。运输装置包括在壳体中环绕的带,所述带通过两个轮引导,其中,至少一个轮构造为驱动轮。在此,驱动装置设置在驱动轮内部并且与驱动轮处于转矩锁合的转动连接中。
9.根据本发明,与现有技术中的线性轴不同,驱动装置集成到线性轴中并且基本上不需要附加的外部结构空间。线性轴的驱动装置完全设置在用于运输装置的驱动轮内部。在此,驱动装置在其圆周上整圈都具有驱动轮,其中,驱动轮设置成安坐在驱动装置上并且通过驱动装置旋转。驱动装置形成紧凑的驱动筒,其可以简单快速地更换。这尤其对于驱动装置有故障的情况或者当对驱动装置的要求改变时,例如当期望不同的传动比时是有利的。
10.可以使用根据本发明的受驱动的线性轴来代替所有常规的标准线性轴。附加地,线性轴适合作为用于工业机器人的机器人臂的机器人基座,以便能够附加地执行线性运
动。
11.驱动装置可以具有支承轴,驱动装置借助于支承轴保持在线性轴中。此外,驱动装置可以具有电动机装置和与之转矩锁合地耦合的传动装置。电动机装置和传动装置可以彼此直接相邻地设置在驱动装置中。此外,电动机装置和传动装置可以通过电动机装置的从动轴耦合。在此,从动轴可以从电动机装置的转子出发与传动装置的输入侧抗扭地耦合。从动轴可以构造为空心轴,所述空心轴可旋转地容纳在轴承轴上。此外,传动装置的输出侧可以抗扭地与驱动轮耦合。由此实现了驱动装置的特别紧凑的结构。
12.轴承轴可以抗扭地设置在线性轴中。此外,电动机装置和传动装置可以容纳在轴承轴上。在此,驱动轮可旋转地支承在轴承轴上。为此可以使用至少一个径向滚动轴承(滚子轴承、滚珠轴承、滚针轴承等)或者也可以使用至少一个径向滑动轴承。此外,传动装置的输出侧能够以类似的方式支撑在轴承轴上。此外,电动机装置的定子可以优选通过径向滚动轴承(滚子轴承、滚珠轴承、滚针轴承等)或径向滑动轴承支撑在空心轴上。
13.受驱动的线性轴的滑座具有多功能接口,其包括机械接口和介质接口,其中介质接口优选包括数据信号接口、电接口和流体接口。在此,在壳体内设置有至少一个可往复运动的介质拖曳装置,该介质拖曳装置具有介质路径,优选地通向数据信号接口的数据信号路径、通向电接口的电路径和通向滑座的多功能接口的流体接口的流体路径。
14.至少一种介质(用于传播信号或物理现象的载体;光学的、电的、流体的)在此通过安装在线性轴中的介质拖曳装置被引导,在滑座上尤其在用作用于工业机器人的机器人臂的机器人基座时需要所述介质。因此,介质在线性轴的内部穿过,并且不需要额外的空间。
15.滑座的多功能接口具有机械接口,该机械接口本身包括数据信号接口、电接口和流体接口。关于多功能接口的以下更详细的实施方案也可以适用于与其对应的多功能配对接口。在此,两个多功能接口,即接口和与其相关的配对接口能够彼此面对并且优选互补地,即部分互补地或基本上完全互补地构造,即接口互补。
16.多功能接口可以构造为滑座固定的接口。在此,多功能接口设置在滑座的引导体上。
17.多功能接口的机械接口可以构造为可插拔的、可旋拧的、带齿的、可夹紧的和/或自锁的接口。此外,机械接口可以具有止挡和/或齿部,尤其是端侧的齿部。如果使用齿部,尤其可以使用赫斯(hirth)齿部。
18.此外,机械接口可以具有螺纹,特别是在径向外部具有外周螺纹或内周螺纹。在此,螺纹或周向螺纹可以构造为自锁的螺纹或周向螺纹。如果使用周向螺纹,则尤其可以使用多线周向螺纹。此外,机械接口可以构造为至少可由接触装置,尤其是接触环机械接触的接口。
19.数据信号接口、电接口和流体接口可以径向地设置在机械接口内部。在此,数据信号接口可以设置在机械接口的中心轴线上。此外,电接口和流体接口可以径向地设置在数据信号接口外部。此外,流体接口可以至少部分径向地设置在电接口外部。
20.多功能接口可以包括由圆形限定的连接侧。在此,连接侧可以在其径向外边缘上具有机械接口。此外,连接侧可以单独地构造在滑座上或者至少部分地通过滑座构造。此外,连接侧可以一件式地或多件式地构造。此外,连接侧可以构造为连接盘或连接套筒。
21.在线性轴内,可以将数据信号路径、电路径和/或流体路径设置为介质路径,所述
介质路径通向滑座的多功能接口。在此,相关的路径可以在线性轴上的相应的外部连接处开始,或者相关的路径例如以管路的形式引入到线性轴中。借助于至少一个介质拖曳装置,可往复运动的数据信号路径、可往复运动的电路径和/或可往复运动的流体路径可在线性轴上受到保护地引导至多功能接口。借助于介质拖曳装置,柔性的光学的、电的、气动的和/或液压的管路能够在保持、即不低于管路的最小允许弯曲半径的情况下被引导。
22.根据本发明的工业机器人包括机器人臂,特别是模块化机器人臂和受驱动的线性轴,其中,机器人臂机械地连接到受驱动的线性轴的滑座上,并且光学地、电地和/或流体地连接到受驱动的线性轴的滑座上。
23.机器人臂可以具有多个臂模块。在此,臂模块可以构造为主动臂模块,借助于该主动臂模块能够使得连接在其上的另外的臂模块旋转。该另外的臂模块可以构造为主动或被动臂模块。此外,臂模块可以构造为被动臂模块,所述被动臂模块例如用作机器人臂内的延长部件和/或位置改变部件。
24.臂模块的壳体优选在端侧具有第一连接侧和相对于连接侧错开地布置的第二连接侧。连接侧优选彼此对应地构造。
25.臂模块可以构造成,使得数据信号、电流或电压和/或流体能够通过臂模块的第一连接侧和/或通过臂模块的第二连接侧与另外的臂模块交换,其中,第一连接侧与第二连接侧机械地、信号技术地、电地和/或流体地连接。
26.第一连接侧和/或第二连接侧可以抗扭地设置在相关的臂模块上。在主动臂模块的情况下,第一连接侧可以被设置成能够围绕旋转轴线旋转,使得第一连接侧能够相对于该连接侧围绕旋转轴线可控地旋转。
附图说明
27.下面根据实施例参考所附的示意性且非按比例示出的附图更详细地阐述本发明。
28.图中示出:
29.图1以从斜上方观察的透视图示出了受驱动的线性轴的实施方式;
30.图2以从斜上方的侧向敞开的三维图示出了图1中的受驱动的线性轴;
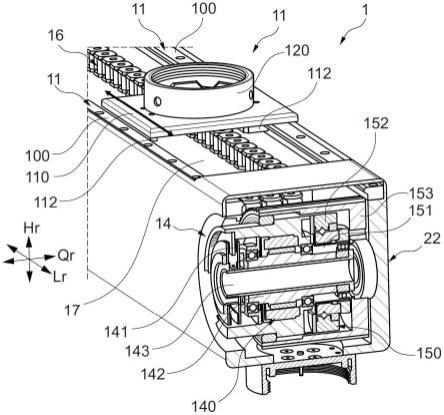
31.图3示出了图1中的线性轴的细节图,其中,受驱动的线性轴在集成的驱动装置的区域中在端侧和中央剖切地示出;
32.图4以中央剖切的二维侧视图示出了用于根据图1至3的受驱动的线性轴的驱动装置的实施方式;
33.图5以三维视图示出了图4中的驱动装置;
34.图6以从斜上方观察的三维俯视图示出了根据图1至3的受驱动的线性轴的滑座的构造为连接套筒的连接侧;
35.图7以从斜上方观察的三维俯视图示出了根据图1至3的受驱动的线性轴的滑座的构造为连接盘的连接侧;和
36.图8以三维侧视图示出了具有根据图1至3的受驱动的线性轴的模块化工业机器人的实施方式。
37.该图示涉及具有高度方向hr、纵向方向lr和横向方向qr的正交坐标系。
具体实施方式
38.根据受驱动的线性轴的实施方式更详细地阐述本发明,所述线性轴用作机器人臂、尤其是模块化机器人臂的机器人基座。然而,受驱动的线性轴不限于这种应用可能性。
39.图1以从斜上方观察的透视图示出了受驱动的线性轴。在图2中以侧向敞开的图示示出了图1的透视图,以便使细节清楚。此外,在图3中示出了受驱动的线性轴的端部区段在端侧和中央剖切的示意图。
40.如图1所示,受驱动的线性轴1包括细长壳体20,该细长壳体具有在壳体20上方的线性的轨道引导件10,该线性的轨道引导件包括两个型材轨道100。在型材轨道100之间设置有可线性往复运动的滑座11,该滑座具有多功能接口120。
41.如尤其图3示出的那样,滑座11在下侧上具有引导体110,所述引导体具有两个侧向滑架112,滑座11借助于所述滑架在型材轨道100之间直线地并且尤其滑动支承地被引导。滑架112也可以侧向地集成到引导体110中。引导体110和滑架112可以多件式地设计。替代地,引导体110和侧向滑架112可以材料上一体地或集成地构造。
42.滑座11在纵向方向lr上具有两个主要的平移自由度。如图3所示,每个型材轨道100在内部具有沿横向方向qr成型的形状配合型材,相关的滑架110相对于该形状配合型材布置在互补的形状配合型材上。
43.滑座11可通过运输装置运动,所述运输装置在此构造为细长的、近似o形的带,优选构造为齿形带15。齿形带15是具有齿部的细长的环绕带,其中的上层在图1中示出。代替齿形带15,也可以使用不同类型的带。
44.齿形带15通过图2中示出的两个带齿的轮153,154被引导。在此,一个轮构造为驱动轮153,而另一个轮构造为叶轮154。但替代地,两个轮也可以是驱动轮。驱动轮153与受驱动的线性轴1的驱动装置14处于转矩锁合的,尤其是固定的转动连接中。驱动装置14和驱动轮153在此设置在线性轴1的壳体20的驱动壳体区段22中,该驱动壳体区段尤其形成壳体20的相关的纵向端部区段。
45.如图3所示,具有环的齿形带15位于驱动轮153上。驱动轮153具有外齿部,该外齿部与齿形带15的与之互补的内齿部相对应。
46.此外,如图2所示,受驱动的线性轴1具有至少一个可往复运动的介质拖曳装置,该介质拖曳装置在所示的实施方式中由两个拖曳链16形成。介质拖曳装置也可以仅具有一个拖曳链或还具有另外的拖曳链。两个拖曳链16设置在线性轴1的壳体20中的齿形带15的上层和下层之间。在此,拖曳链16放置在板状装置17上,该装置侧向地在内部固定在壳体20上。借助于两个拖曳链16,介质路径例如数据信号路径、电路径和流体路径可在线性轴1中往复运动地设置并且可被保护地引导至多功能接口120。拖曳链16设置成,使得最小弯曲半径不低于介质路径的特定设计方案。
47.两个拖曳链16彼此相反地弯曲并且在纵向方向lr上彼此相对放置在板状装置17上。优选地,在横向侧上,尤其在纵向方向lr上主要或基本上居中地,相关的路径通过板状装置17中的凹部(未示出)引导到相应的拖曳链16中。相关的拖曳链16由此出发首先在线性轴1的纵向端部的方向上引导直至如下区域,在该区域中拖曳链弯曲到相反的横向侧上并且在滑座11的方向上引导回。在滑座11下方,拖曳链16的介质路径通向滑座11的多功能接口120。
48.滑座11的多功能接口120具有连接侧114。如图3和图6所示,连接侧114可以构造为用于连接盘的连接套筒。替代地,连接侧114可以如图7所示构造为用于连接套筒的连接盘。然而,连接侧在此可以具有任意的接触模拟部。在此,多功能接口120的连接侧114原则上设计成,使得多功能接口120的连接侧114与用于通过拖曳链16中的介质路径引导至滑座11的多功能接口120的介质的取用器的连接端侧对应并且可以彼此连接。
49.如图3以及尤其是图4和图5中的细节图所示,线性轴1的驱动装置14包括电动机装置140和传动装置150,它们构造为驱动筒。因此,驱动装置14形成紧凑的单元,其可以简单且快速地设置在线性轴1中并且可再次拆卸。
50.借助于驱动装置14,齿形带15和与该齿形带机械固定连接的滑座11能够以电动方式并且优选减速地驱动。在此,可以使用唯一的驱动装置14和用于齿形带15的被动转向轮,或者可以使用各具有用于齿形带15的驱动轮的两个驱动装置14。
51.驱动装置14的原理设计具有传动装置150的径向外部的传动装置输出端,驱动装置14的用于齿形带15的驱动轮153位于该传动装置输出端上。
52.优选地,驱动装置14的轴组件位于驱动装置14的电动机装置140和传动装置150之间。轴组件具有空心轴142,该空心轴相对于传动装置150的输出侧152相对快速地旋转。在空心轴142中设置有相对于线性轴1的壳体20抗扭的轴承轴143。在此,空心轴142优选旋转滑动地支承在抗扭的轴承轴143上。也可以附加地使用至少一个径向滚动轴承,即滚子轴承、滚珠轴承、滚针轴承等。
53.传动装置150的输入侧151抗扭地与空心轴142连接,由此输入侧151支承在空心轴142上。传动装置150的中间环可以通过抗扭的轴承轴143上的径向滚动轴承远离电动机装置140侧向地支撑在实际传动装置150上。在此,可以设置用于径向内部支撑的单独的环。在应力波传动装置中,这样的中间环例如是可变形的圆柱形套筒或所谓的柔性花键。在摆线传动装置中,这例如是摆线盘。
54.传动装置150的输出侧152一方面可以在电动机装置140和传动装置150之间例如通过径向滚动轴承支撑在空心轴142上。此外,输出侧152另一方面可以在电动机装置140的另一侧通过径向滚动轴承又支撑在空心轴142上或者必要时也支撑在轴承轴143上。所有径向滚动轴承可以构造为滚子轴承、滚珠轴承、滚针轴承等。必要时,代替径向滚动轴承也可使用径向滑动轴承。
55.电动机装置140以其从动转速驱动作为传动装置150的输入轴的快速空心轴142,该快速空心轴优选地将其驱动转速降低到传动装置150或驱动装置14的从动转速。传动装置150的输出侧152抗扭地与驱动轮153连接。在此,驱动轮153在径向外部位于传动装置150的输出侧152上。优选地,传动装置150的输出侧152和驱动轮153相互构造为,使得驱动轮153优选可以简单地从输出侧152拆卸和重新安装。
56.此外,驱动装置14在抗扭的轴承轴143上具有优选构造为旋转发送器的编码器141。
57.在图6和图7中示出了滑座11的具有连接侧114的多功能接口120的两个可能的设计方案。在图6中示出的滑座11的多功能接口120的实施方案对应于也在图3中示出的实施方式。多功能接口120的两个实施方式彼此互补地构造并且能够彼此耦合。
58.在两个实施方式中,滑座11的多功能接口120具有机械接口。此外,多功能接口可
以包括数据信号接口、电接口和流体接口。在此,相关的机械接口优选包围其他接口,所述其他接口因此在机械接口的径向内部设置在多功能接口120中。
59.在图6中示出的第一实施方式中,滑座11的连接侧114圆形地构造。连接侧114在圆周侧具有带有内螺纹的固定环132。连接侧114还包括具有四个齿的端齿部133,该端齿部构造为赫斯(hirth)齿部。此外,在连接侧114上设置有定心容纳部137。具有内螺纹的固定环132和端齿部133形成机械接口。
60.连接侧114还具有接触装置,所述接触装置在第一实施方式中包含数据信号接口装置134、电接口装置135和流体接口装置136。在此,接触装置适配于输送给连接侧114的介质的类型和数量。
61.数据信号接口装置134设置在连接侧114的中心轴线ra上。电接口装置135在数据信号接口装置134的径向外部布置在连接侧114上。而流体接口装置136在电接口装置134的径向外部设置在连接侧114上。
62.数据信号接口装置134构造为光学的或电的插接连接器。电接口装置135包括四个电插接连接器,所述电插接连接器位于第一内圆周上。流体接口装置136由布置在第二外圆周上的四个流体插接连接器组成。
63.连接侧114的在图7中示出的第二实施方式垂直于旋转轴线ra延伸并且圆形地构造。在连接侧114的外周侧上安装有外螺纹232。连接侧114包括具有六个齿的端齿部233,该端齿部构造为赫斯(hirth)齿部。此外,在连接侧114上设置有定心销237。外螺纹232和端齿部233形成机械连接元件。
64.此外,连接侧114包括接触装置,所述接触装置在第二实施方式中包含数据信号接口装置234、电接口装置235和流体接口装置236。在此,接触装置适配于输送给连接侧114的介质的类型和数量。
65.数据信号接口装置234设置在连接侧114的中心轴线ra上。电接口装置235在数据信号接口装置234的径向外部布置在连接侧114上。而流体接口装置236在电接口装置234的径向外部设置在连接侧114上。
66.数据信号接口装置234构造为用于光学插接连接器的容纳部。电接口装置235包括四个用于电插接连接器的容纳部,所述容纳部位于第一内圆周上。流体接口装置236由四个用于流体插接连接器的容纳部组成,所述容纳部布置在第二外圆周上。
67.在将滑座11的多功能接口120与取出装置(例如机器人臂)组装时,如在图8中所示,连接侧彼此互补地构造并且可彼此耦合。滑座11的具有连接侧114的多功能接口120的设计方案在此例如可以对应于在图6中示出的实施方式。然后,根据图7中所示的实施方式构造取出装置的连接侧。
68.下面阐述在图6和图7中示出的、彼此互补地构造的连接侧的连接。
69.根据图7中的实施方式的连接侧114被放置到根据图6中的实施方式的连接侧114上。在此,定心销237接合到定心容纳部137中。因此定心销237和定心容纳部137用作编码装置。但是也可以设置不同设计的编码。编码例如可以通过连接侧的互补的几何形状来进行。此外,在两个连接侧的接触装置接触之前,特别是用于传输数据信号和电流或电压的接触装置接触之前,通过将定心销237接合到定心容纳部137中,在待连接的两个元件之间实现电位平衡。
70.通过旋转固定环132,使内螺纹旋拧到外螺纹232上,由此根据图6和图7的连接侧彼此压紧。在压紧的状态下,两个端齿部133,233这样相互啮合,使得连接侧以机械方式转矩锁合地相互连接。此外,两个连接侧的接触装置接触,从而提供用于传输数据信号、电流或电压和流体的光学耦合、电耦合和流体耦合。光学耦合在此在机械连接的中心轴线上,特别是在旋转轴线上进行。所述电耦合和所述流体耦合设置在所述光学耦合的径向外部。
71.光学耦合通过两个数据信号接口装置134,234之间的传输来实现,所述两个数据信号接口装置可以插接到彼此中。优选地,数据信号接口装置在此构造为简单构造的光机械或机电触摸连接装置或插接连接装置。
72.所述电耦合通过两个电接口装置135,235之间的传输来实现,所述两个电接口装置能够插接到彼此中。优选地,电接口装置在此构造为简单构造的机电的接触连接装置或插接连接装置。
73.流体耦合通过两个流体接口装置136,236之间的传输来实现,所述两个流体接口装置可以插接到彼此中。优选地,流体接口装置在此构造为简单构造的流体机械的接触连接装置或插接连接装置。
74.在图8中示例性地示出工业机器人的一种实施方式。工业机器人是用于自动化技术的具有多个自由度的自动机器,其通过预编程的控制/调节能够在工作环境中以(由条件决定的)自身功率执行各种功能。
75.工业机器人包括由受驱动的线性轴1形成的机器人基座、机器人臂2和优选可更换的末端执行器,该末端执行器在图8中未示出。末端执行器例如设有工具、夹持器等,所述工具、夹持器布置在机器人臂2的自由端或远端上。
76.工业机器人的机器人臂2模块化地构造有多个臂模块。原则上,臂模块可以任意地设计,其中,可以在主动臂模块5和被动臂模块6之间进行区分。主动臂模块5具有驱动装置,借助于该驱动装置可以使可连接到其上的另一臂模块旋转。类似地,被动臂模块6不具有驱动装置并且用作延长部件。
77.臂模块分别具有两个连接侧,其中,主动臂模块5具有l形并且被动臂模块6具有i形。然而,臂模块也可以具有其他几何形状。
78.臂模块的连接侧分别对应地并且互补地或类似地构造。在此,臂模块的连接侧能够机械地、光学地、电地和流体地与另一臂模块的相关的连接侧耦合。优选地,臂模块的连接侧分别具有统一的、互补的接触模仿部,所述接触模仿部确保臂模块的兼容性。优选地,臂模块在此分别具有在图6中示出的实施方案中的连接侧和在图7中示出的实施方案中的连接侧。
79.图8中的机器人臂2包括四个主动臂模块5和一个被动臂模块6。然而,机器人臂可以由任意数量的主动和被动臂模块组成。在图8中,为了区分,主动臂模块5和被动臂模块6分别设有通过点分开的附加编号,其中,从机器人基座出发朝远端方向编号。
80.在图8中的实施方案中的机器人臂2中,第一主动臂模块5.1与作为机器人基座的受驱动的线性轴1的滑座11连接。在第一主动臂模块5.1上连接有第二主动臂模块5.2。第二主动臂模块5.2与第三主动臂模块5.3之间设置有一被动臂模块6.1,在第三主动臂模块5.3上连接有第四主动臂模块5.4,该第四主动臂模块构成机器人臂2的远端。
81.每个主动臂模块5形成运动轴线,因此,图8中的机器人臂2具有四个运动轴线,所
述运动轴线构造为旋转轴线ran(n=1,...,4)。在此,相应的主动臂模块5的任意数量的完整的和部分的周圈能够沿相关的旋转轴线ran(n=1,...,4)的优选两个圆周方向ur执行。在此,旋转轴线ran(n=1,...,4)优选是机器人臂2例如相对于受驱动的线性轴1的理想的“关节”(旋转关节、转动关节和/或枢转关节)。原则上,机器人臂可以具有两个至六个运动轴线,所述运动轴线通过相应数量的主动臂模块提供。
82.在主动臂模块5中,连接侧被设计成能够相对于彼此可控地扭转。此外,设置有用于在连接侧之间旋转传输数据信号的光学旋转传输装置,用于在连接侧之间旋转传输电能的电旋转传输装置以及用于在连接侧之间旋转传输流体的流体旋转传输装置。
83.附图标记列表
84.1 受驱动的线性轴
85.2 机器人臂
86.5 臂模块
87.10 线性的轨道引导件
88.11 滑座
89.14 驱动装置
90.15 齿形带
91.16 拖曳链
92.17 板状装置
93.20 壳体
94.22 驱动壳体区段
95.100 型材轨道
96.110引导体(滑座)
97.112滑架(滑座)
98.114连接侧(滑座)
99.120多功能接口(滑座)
100.132 固定环
101.133 端齿部
102.134 光学接口装置
103.135 电接口装置
104.136 流体接口装置
105.137 定心容纳部
106.140 电动机装置
107.141 编码器
108.142 空心轴
109.143 轴承轴
110.150 传动装置
111.151输入侧(传动装置)
112.152输出侧(传动装置)
113.153 驱动轮
114.154 叶轮
115.232 外螺纹
116.233 端齿部
117.234 光学接口装置
118.235 电接口装置
119.236 流体接口装置
120.237 定心销
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1