校准装置及校准的自动设定方法与流程
本发明涉及确定机械臂的姿态与传感器对物体的检测结果的对应关系的技术。
背景技术:
1、已知有根据传感器对物体的检测结果检测并控制机械臂的姿态和动作的技术(手眼系统、视觉伺服、视觉反馈等),例如已在专利文献1中公开。在这样的技术中,为了能够高精度地检测并控制机械臂的姿态和动作,需要进行用于确定机械臂的姿态与传感器的检测结果的对应关系的校准。通常,机械臂的姿态用以机械臂为基准而规定的坐标系(机器人坐标系)表示,传感器的检测结果(物体的位置和姿态等)用以传感器为基准而规定的坐标系(传感器坐标系)表示。因此,校准也可以说是确定机器人坐标系与传感器坐标系的对应关系的处理。
2、现有技术文献
3、专利文献
4、专利文献1:日本特开2018-111166号公报
技术实现思路
1、发明所要解决的技术问题
2、但是,以往在通常的校准中,需要用户输入数量庞大的参数,操作烦杂。例如,用户以机械臂的姿态被依次变更的方式依次指定几十个姿态。
3、在专利文献1所公开的技术中,在执行校准之前,一边控制机器人(使进行动作)使对机器人设置的标记移动,一边根据通过摄像机拍摄的图像检测标记。由此,测定与由用户指定的图像范围(所拍摄的图像的一部分)对应的机器人的动作范围。并且,在执行校准时,以使标记在所测定的动作范围内移动的方式控制机器人。但是,即使是使用了专利文献1所公开的技术,用户也必须指定图像范围。并且,需要在执行校准之前使机器人进行动作,所以不能快速完成校准。
4、并且,以往在机械臂与传感器的校准中,需要一边观察从传感器获取的信息的结果一边使机器人进行动作的技能,也需要能够进行传感器的可测定区域和感测性能的最佳的调谐等技能。因此,还有为执行正确的校准而需要熟练的作业者(熟练的系统集成商)的问题。并且,为了校正位置姿态,需要不仅对简单的二维的图像,也要对三维的图像信息进行处理,对系统集成商所要求的技术知识增多,校准用的操作并非易事。实际状况是能够操作这些的熟练技术人员少,所以要求即使是没有专业知识的作业者也能容易快速地进行校准。
5、本发明正是鉴于上述实际情况而完成的,其目的在于,提供一种容易且能够在短时间内进行校准的技术。
6、用于解决问题的技术方案
7、为了达到上述目的,本发明采用以下方案。
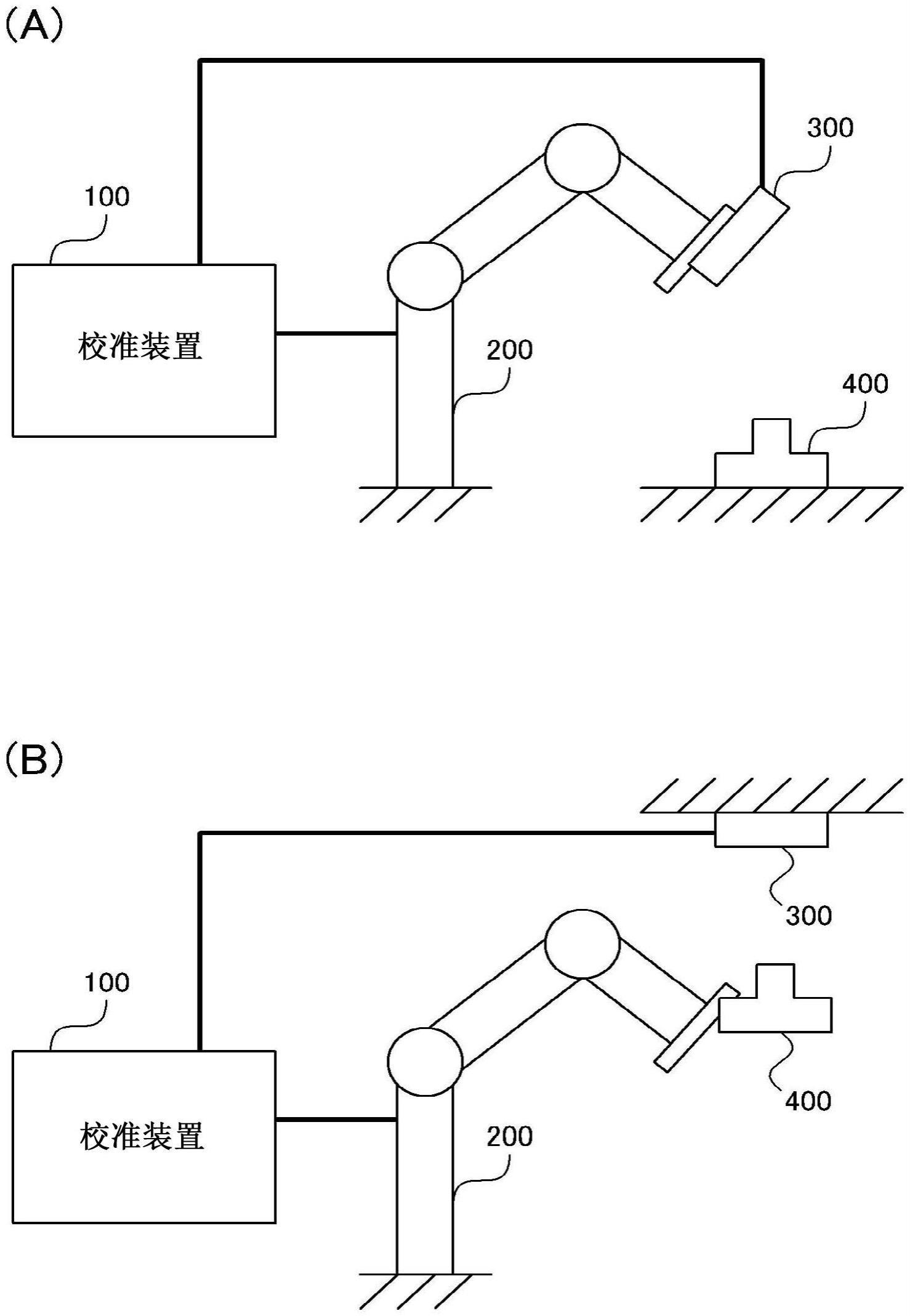
8、本发明的第一方案提供一种根据传感器对物体的检测结果进行校准的校准装置,其特征在于,校准装置具有:确定单元,根据传感器的视野尺寸和所述物体的尺寸确定用于变更安装有检测物体的所述传感器或者所述物体的机械臂的姿态的范围;获取单元,在通过所述确定单元所确定的所述范围内的所述机械臂的姿态的变更中,反复获取所述机械臂的姿态的信息与所述传感器对所述物体的检测结果的组合;以及校准单元,根据通过所述获取单元所获取的多个所述组合进行用于确定所述机械臂的姿态与所述物体的检测结果的对应关系的校准。
9、为了进行校准,需要以使物体进入感测范围的方式变更机械臂的姿态,感测范围包括传感器能够测定的二维平面的视野和作为三维空间能够测定的进深方向。根据上述的结构,机械臂的动作范围(变更机械臂的姿态用的范围)是根据传感器的视野尺寸和物体的尺寸(物体尺寸)自动确定的。这样,作为机械臂的动作范围,能够高精度地确定诸如物体进入传感器的视野的范围,能够进行校准。并且,不需使机械臂进行动作即可在短时间内确定机械臂的动作范围,所以能够在短时间内进行校准。
10、另外,能够容易(无烦杂操作)地进行校准。例如,视野尺寸的信息能够由传感器获取,物体尺寸的信息能够由物体的设计数据获取,所以不需参数的输入这样的操作即可进行校准。另外,视野尺寸和物体尺寸的信息也可以由用户输入。用户能够容易进行输入视野尺寸和物体尺寸的信息的操作,所以即使是视野尺寸和物体尺寸至少一方的信息由用户的输入的情况下,也能仅以简单的操作进行校准。
11、也可以是,所述传感器或者所述物体被安装在所述机械臂的前端,所述确定单元确定用于变更所述机械臂的前端的位置的范围来作为变更所述机械臂的姿态的范围。这样,能够进行用于确定机械臂的前端的位置(用机器人坐标系表示的位置)与物体的检测结果(用传感器坐标系表示的结果)的对应关系的校准。
12、也可以是,所述传感器或者所述物体被安装在所述机械臂的前端,所述确定单元确定用于变更所述机械臂的前端的姿态的范围来作为变更所述机械臂的姿态的范围。这样,能够进行用于确定机械臂的前端的姿态(用机器人坐标系表示的位置及姿态)与物体的检测结果(用传感器坐标系表示的结果)的对应关系的校准。如果考虑机械臂的前端的位置和姿态,则能够进行比仅考虑机械臂的前端的位置和姿态中一方的情况高精度的校准。
13、也可以是,所述物体的检测结果包括所述物体的通过所述传感器检测的位置。这样,能够进行用于确定机械臂的姿态(用机器人坐标系表示的姿态)与物体的检测位置(通过传感器检测的位置;用传感器坐标系表示的位置)的对应关系的校准。也可以是,所述物体的检测结果包括所述物体的通过所述传感器检测的姿态。这样,能够进行用于确定机械臂的姿态(用机器人坐标系表示的姿态)与物体的检测姿态(通过传感器检测的姿态;用传感器坐标系表示的姿态)的对应关系的校准。通过考虑物体的检测位置和检测姿态,能够进行比仅考虑物体的检测位置和检测姿态中一方的情况高精度的校准。
14、即使是物体进入传感器的视野时,根据传感器的视野中的物体的位置(相对位置),有时传感器不能高精度地检测物体(物体的检测结果的可靠度较低)。例如,在传感器的视野的端部中,有时与物体的区域大不相同的区域被检测为物体的区域。因此,也可以设为还具有计算所述物体的检测结果的可靠度的计算单元。所述可靠度也可以设为所述物体的表面上的通过所述传感器检测的各位置与利用预定的设计数据表示的各位置的一致度。
15、若使用可靠度较低的检测结果(物体的检测结果),则导致校准的精度降低。因此,所述校准单元也可以根据所述多个组合中所述可靠度为预定的阈值以上的组合进行所述校准。这样,可靠度较低的检测结果不会被使用,所以能够高精度地进行校准。
16、在执行校准之后,若获取并使用可靠度较低的检测结果(物体的检测结果),则不能高精度地检测机械臂的姿态的动作,不能高精度地进行控制。因此,也可以还具有记录单元,将所述可靠度达到预定的阈值以上的所述机械臂的姿态的范围,作为在执行所述校准之后能够变更所述机械臂的姿态的范围记录在存储部中。这样,可靠度较低的检测结果不易被获取,所以能够高精度地检测机械臂的姿态和动作,并且高精度地进行控制。
17、本发明的第二方案提供一种校准的自动设定方法,其特征在于,在根据传感器对物体的检测结果进行校准的自动设定的方法中,具有:确定步骤,根据传感器的视野尺寸和所述物体的尺寸确定用于变更安装有检测物体的所述传感器或者所述物体的机械臂的姿态的范围;获取步骤,当在所述确定步骤中所确定的所述范围内的所述机械臂的姿态的变更中,反复获取所述机械臂的姿态的信息与所述传感器对所述物体的检测结果的组合;以及校准步骤,根据在所述获取步骤中所获取的多个所述组合,进行用于确定所述机械臂的姿态与所述物体的检测结果的对应关系的校准。
18、另外,本发明能够理解为具有上述结构乃至功能的至少一部分的机器人、机器人控制器、机器人系统等。并且,本发明能够理解为包括上述处理的至少一部分的校准的自动设定方法、校准方法、机器人的控制方法、机器人控制器的控制方法、或者机器人系统的控制方法、和用于使计算机执行这些方法的程序、或者能够非易失性地记录那样的程序的计算机可读的记录介质。上述结构及处理彼此只要不产生技术上的矛盾,则能够相互组合并构成本发明。
19、发明效果
20、根据本发明,能够容易而且在短时间内进行校准。
- 还没有人留言评论。精彩留言会获得点赞!