机器人手的制作方法
本发明涉及机器人手。
背景技术:
1、至今为止,能够对工件进行所谓的仿形握持的机器人手被众所周知。例如,在专利文献1中所公开的机器人手包括一对手指、马达和差动齿轮机构,所述一对手指握持工件,所述马达使一对手指动作,所述差动齿轮机构将马达的动力传递给一对手指。根据该机器人手,当工件从机器人手的中心偏离时,一对手指中的靠近工件的一手指(一个手指)先接触到工件后停止。即使一个手指停止,另一个手指也保持继续移动,然后,接触到工件后停止。像这样,进行工件的仿形握持。
2、专利文献1:日本特开昭62-99094号公报
技术实现思路
1、但是,在所述机器人手中,由于使用差动齿轮机构,因此存在有在一个手指停止之后,另一个手指的动作缺乏流畅性的问题。
2、鉴于上述内容,本发明的技术的目的在于提供能够进行流畅的仿形握持的机器人手。
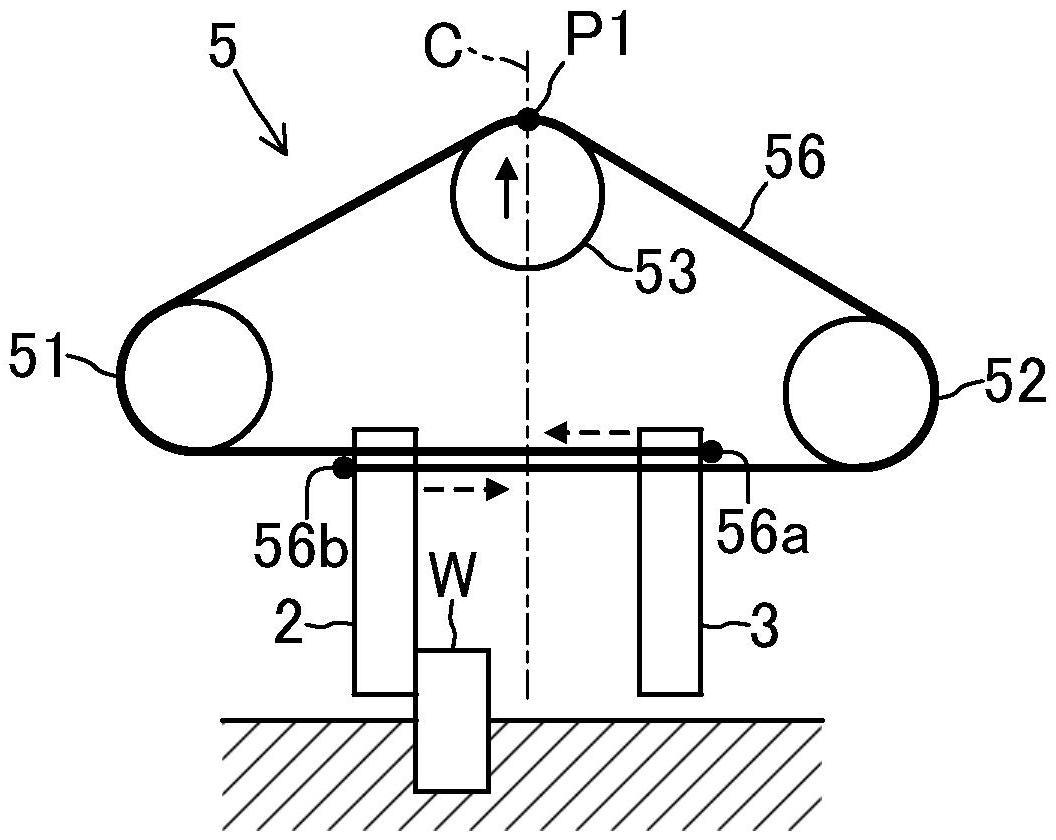
3、本发明的技术是包括第一手指以及第二手指和第一移动机构的机器人手,所述第一移动机构使所述第一手指以及所述第二手指在规定的移动方向彼此接近,使所述第一手指以及所述第二手指握持工件。所述第一移动机构具有第一动滑轮、第一索状部件和第一致动器。所述第一索状部件具有两个端部,缠绕在所述第一动滑轮,该两个端部连接在所述第一手指以及所述第二手指的每一个。所述第一致动器使所述第一动滑轮移动。所述第一致动器使所述第一动滑轮移动,以使所述第一索状部件的张力作用在所述第一手指以及所述第二手指,所述第一手指以及所述第二手指彼此接近。
4、在上述技术中,与由第一致动器使第一动滑轮移动的移动量相对应,第一手指以及第二手指分别被第一索状部件拉动而移动。更详细而言,当第一动滑轮通过第一致动器而移动时,第一索状部件的张力作用于第一手指以及第二手指,第一手指以及第二手指向彼此接近的方向移动。其结果是第一手指以及第二手指彼此接近,从外侧握持工件w。此时,与第一动滑轮的移动量相对应的第一手指的移动量和第二手指的移动量根据对于第一手指的移动的阻力以及对于第二手指的移动的阻力而被适当调整。例如,当第一手指接触到工件w,对于第一手指的移动的阻力变大时,例如,第一手指停止,第二手指的移动量适当增加。因此,第二手指能够朝向工件w继续顺利地移动。其结果是能够通过第二手指到达工件w,顺利地进行仿形握持。
5、本发明所公开的其它技术是包括第一手指以及第二手指和第二移动机构的机器人手,所述第二移动机构使所述第一手指以及所述第二手指在规定的移动方向彼此分离,使所述第一手指以及所述第二手指握持工件。所述第二移动机构具有第二动滑轮、第二索状部件和第二致动器。所述第二索状部件具有两个端部,缠绕在所述第二动滑轮,该两个端部连接在所述第一手指以及所述第二手指的每一个。所述第二致动器使所述第二动滑轮移动。所述第二致动器使所述第二动滑轮移动,以使所述第二索状部件的张力作用在所述第一手指以及所述第二手指,所述第一手指以及所述第二手指彼此分离。
6、在上述技术中,与由第二致动器使第二动滑轮移动的移动量相对应,第一手指以及第二手指分别被第二索状部件拉动而移动。更详细而言,当第二动滑轮通过第二致动器而移动时,第二索状部件的张力作用于第一手指以及第二手指,第一手指以及第二手指向彼此分离的方向移动。其结果是第一手指2以及第二手指3彼此分离,从内侧握持工件w。此时,与第二动滑轮65的移动量相对应的第一手指的移动量和第二手指的移动量根据对于第一手指的移动的阻力以及对于第二手指的移动的阻力而被适当调整。例如,当第一手指接触到工件w,对于第一手指的移动的阻力变大时,例如,第一手指停止,第二手指的移动量适当增加。因此,第二手指能够朝向工件w继续顺利地移动。其结果是能够通过第二手指到达工件w,顺利地进行仿形握持。
7、(发明效果)
8、根据所述机器人手,能够顺利地进行仿形握持。
技术特征:
1.一种机器人手,其特征在于:
2.根据权利要求1所述的机器人手,其特征在于:
3.根据权利要求1或2所述的机器人手,其特征在于:
4.根据权利要求3所述的机器人手,其特征在于:
5.根据权利要求3或4所述的机器人手,其特征在于:
6.根据权利要求5所述的机器人手,其特征在于:
7.根据权利要求1或2所述的机器人手,其特征在于:
8.根据权利要求7所述的机器人手,其特征在于:
9.根据权利要求8所述的机器人手,其特征在于:
10.根据权利要求9所述的机器人手,其特征在于:
11.根据权利要求9或10所述的机器人手,其特征在于:
12.根据权利要求11所述的机器人手,其特征在于:
13.一种机器人手,其特征在于:
14.根据权利要求13所述的机器人手,其特征在于:
15.根据权利要求13或14所述的机器人手,其特征在于:
16.根据权利要求15所述的机器人手,其特征在于:
17.根据权利要求15或16所述的机器人手,其特征在于:
18.根据权利要求17所述的机器人手,其特征在于:
技术总结
本发明提供一种机器人手。机器人手(100)包括第一手指(2)以及第二手指(3)和第一移动机构(5),所述第一移动机构(5)使第一手指(2)以及第二手指(3)在规定的移动方向彼此接近,使第一手指(2)以及第二手指(3)握持工件。第一移动机构(5)具有第一动滑轮(53)、第一金属丝(56)和第一气缸(57),所述第一金属丝(56)具有两个端部,缠绕在第一动滑轮(53),该两个端部连接在第一手指(2)以及第二手指(3)的每一个,所述第一气缸(57)使第一动滑轮(53)移动。第一气缸(57)使第一动滑轮(53)移动,以使第一金属丝(56)的张力作用在第一手指(2)以及第二手指(3),第一手指(2)以及第二手指(3)彼此接近。
技术研发人员:尾立圭巳,和田寿夫,村濑阳平,福田裕章
受保护的技术使用者:川崎重工业株式会社
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!