一种自走式危险作业机器狗的制作方法
1.本发明涉及机器人技术领域,具体涉及一种自走式危险作业机器狗。
背景技术:
2.在电力行业、化工行业以及运输业等行业中,经常遇到需要人力处理危险装置拆装、高压带电设备测试以及危险品转移等的场景,切经常遇到工作环境狭窄,防护装备无法有效保护人员等不安全因素。在此种情况下,需要一种操控灵活的机器人携带专业装备代替人工工作。
技术实现要素:
3.(一)要解决的技术问题
4.为了克服现有技术不足,现提出一种自走式危险作业机器狗,能够利用本机器狗代替操作人员进入危险环境作业现场并处置危险物品或危险装置。
5.(二)技术方案
6.本发明通过如下技术方案实现:本发明提出了一种包括机器狗主体,所述机器狗主体包括机器狗身体、设置于机器狗两侧的狗腿以及设置于机器狗身体上部的机械手臂,所述机器狗身体的前端以及后端处均设置有图像采集装置,所述机器狗身体的外侧四周分布有雷达装置。
7.进一步的,所述机器狗身体内部设置有处理器、电源、信号接收器以及驱动狗腿运动的驱动电机。
8.进一步的,所述机械手臂与驱动电机相连接,所述机械手臂包括关节以及与关节旋转连接的臂杆。
9.进一步的,所述机械手臂的末端设置有模块化接口。
10.进一步的,还包括一远程控制装置。
11.进一步的,所述机器狗身体上还设置有可折叠辅助支撑。
12.进一步的,所述图像采集装置、雷达装置、处理器、电源、信号接收器、驱动电机电连接。
13.(三)有益效果
14.本发明相对于现有技术,具有以下有益效果:
15.本发明提到的一种自走式危险作业机器狗,能够代替操作人员进入危险环境作业现场并处置危险物品或危险装置,设置的图像采集装置以及雷达装置能够对现场环境进行分析,给予远程操作人员对处理危险物品更加详细的信息以便更好地处理问题,同时由于设置有机械手臂,能够在复杂情况下,利用机械手臂及时抓取并处理危险物品。
附图说明
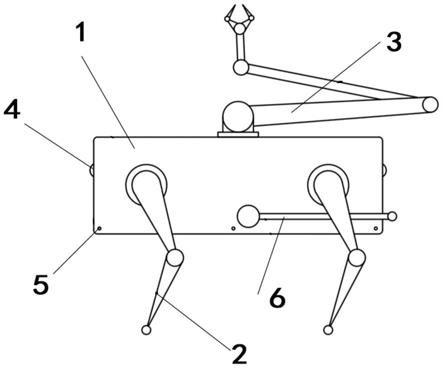
16.图1是本发明结构示意图。
17.1-机器狗身体;2-狗腿;3-机械手臂;4-图像采集装置;5-雷达装置;6可折叠辅助支撑。
具体实施方式
18.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
19.如图1所示的一种自走式危险作业机器狗,包括机器狗主体,所述机器狗主体包括机器狗身体1、设置于机器狗1两侧的狗腿2以及设置于机器狗身体1上部的机械手臂3,所述机器狗身体1的前端以及后端处均设置有图像采集装置4,所述机器狗身体1的外侧四周分布有雷达装置5。
20.其中,所述机器狗身体1内部设置有处理器、电源、信号接收器以及驱动狗腿2运动的驱动电机,所述机械手臂3与驱动电机相连接,所述机械手臂3包括关节以及与关节旋转连接的臂杆,所述机械手臂3的末端设置有模块化接口,还包括一远程控制装置,所述机器狗身体1上还设置有可折叠辅助支撑6,所述图像采集装置4、雷达装置5、处理器、电源、信号接收器、驱动电机电连接。
21.具体的,所述图像采集装置4为高清摄像头,所述雷达装置5为毫米波雷达。
22.本发明提到的一种自走式危险作业机器狗,其在具体使用时,当机器狗通电后,机器狗的狗腿2立即处于站立状态,此时高清摄像头、毫米波雷达、处理器和信号接受器处于工作状态。操作人员开始对机器狗下达指令,在接收到信号后,处理器将信号传递至驱动电机,驱动电机控制机器狗的狗腿2进行移动,在移动至目标地点后,操作人员利用远程控制装置打开可折叠辅助支撑6,用来支撑机器狗身体1,控制机械手臂3进行抓取、插接、挪动等作业,完成对危险现场的取样与收集工作,在操作完毕后,再次利用远程控制装置将可折叠辅助支撑6收起,并驱动机器狗离开现场。
23.上面所述的实施例仅仅是对本发明的优选实施方式进行描述,并非对本发明的构思和范围进行限定。在不脱离本发明设计构思的前提下,本领域普通人员对本发明的技术方案做出的各种变型和改进,均应落入到本发明的保护范围,本发明请求保护的技术内容,已经全部记载在权利要求书中。
技术特征:
1.一种自走式危险作业机器狗,包括机器狗主体,其特征在于:所述机器狗主体包括机器狗身体(1)、设置于机器狗(1)两侧的狗腿(2)以及设置于机器狗身体(1)上部的机械手臂(3),所述机器狗身体(1)的前端以及后端处均设置有图像采集装置(4),所述机器狗身体(1)的外侧四周分布有雷达装置(5)。2.根据权利要求1所述的一种自走式危险作业机器狗,其特征在于:所述机器狗身体(1)内部设置有处理器、电源、信号接收器以及驱动狗腿(2)运动的驱动电机。3.根据权利要求2所述的一种自走式危险作业机器狗,其特征在于:所述机械手臂(3)与驱动电机相连接,所述机械手臂(3)包括关节以及与关节旋转连接的臂杆。4.根据权利要求3所述的一种自走式危险作业机器狗,其特征在于:所述机械手臂(3)的末端设置有模块化接口。5.根据权利要求1所述的一种自走式危险作业机器狗,其特征在于:还包括一远程控制装置。6.根据权利要求1所述的一种自走式危险作业机器狗,其特征在于:所述机器狗身体(1)上还设置有可折叠辅助支撑(6)。7.根据权利要求1~6任意一项所述的一种自走式危险作业机器狗,其特征在于:所述图像采集装置(4)、雷达装置(5)、处理器、电源、信号接收器、驱动电机电连接。
技术总结
本发明公开了一种包括机器狗主体,所述机器狗主体包括机器狗身体、设置于机器狗两侧的狗腿以及设置于机器狗身体上部的机械手臂,所述机器狗身体的前端以及后端处均设置有图像采集装置,所述机器狗身体的外侧四周分布有雷达装置。达装置。达装置。
技术研发人员:于文婷
受保护的技术使用者:于文婷
技术研发日:2022.01.10
技术公布日:2022/3/15
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1