一种并联式两自由度运动平台
1.本发明涉及一种微动平台,具体涉及一种并联式两自由度运动平台。
背景技术:
2.作为微机电系统的关键组成部分,微动平台广泛应用于装载精密仪器或其关键部件如常见的光学镜头、精密微操终杆和微夹持器。因此,微动平台需要具有多维运动、大行程和反应快速性。
3.与静电梳齿驱动、电热驱动和形状记忆合金驱动等相比,压电叠堆驱动具有分辨率高、驱动力大、频响范围宽、响应速度快和动态特性好等优点,因而特别适合用于驱动微动平台。在微装配技术领域,经常需要使用微动平台带动微夹持器进行微米级别到毫米级别的运动,因此,微动平台应该具有大行程。在驱动微动平台时,微动平台上载物较重时,对驱动力有一定要求,在微操作中,对系统反应快速性也有一定要求。
技术实现要素:
4.本发明为克服现有技术不足,提供一种既能实现微动平台的大行程,又能提高载物平台载重、反应快速性的并联式两自由度运动平台。
5.一种并联式两自由度运动平台包含压电叠堆驱动器、桥式放大机构、平行四边形机构、力放大机构、载物平台、机架和底座;机架安装在底座上,机架上镜像布置有两个力放大机构,每个力放大机构由一个压电叠堆驱动器驱动,桥式放大机构由两个力放大机构驱动,平行四边形机构的输入端与桥式放大机构的输出端相连,平行四边形机构通过连接杆与载物平台相连,驱动载物平台在水平面上沿横向和纵向两个方向运动。
6.本发明相比现有技术的有益效果是:
7.1、通过力放大机构提高系统反应快速性。
8.2、通过桥式放大机构和平行四边形机构实现对压电叠堆驱动器的输出位移的放大和解耦,使得载物平台具有两个维度方向上的大行程。
9.3、力放大机构采用柔性铰链,并通过线切割加工而成,整个柔性铰链构成的力放大机构为一个整体,具有体积小、无机械摩擦、导向精度高、加工精度易于保证和不需要装配的优点。
10.4、重量轻、操作方便,适用于微操作机器人和微机电系统。
11.下面结合附图和实施例对本发明的技术方案作进一步地说明:
附图说明
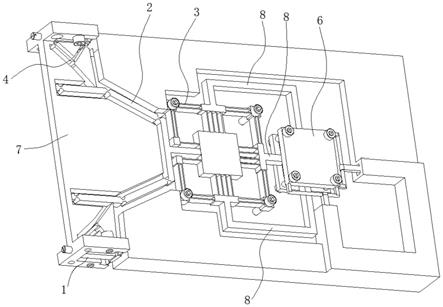
12.图1是本发明的并联式两自由度运动平台的立体图;
13.图2是力放大机构的主视图;
14.图3是图2的俯视图;
15.图4是平行四边形机构与连接杆相连的结构示意图;
16.图5是图4的f-f剖视图;
17.图6是载物平台的分解图;
18.图7是机架、底座和盖板相结合的分解图;
19.图8是本发明的并联式两自由度运动平台运动原理图。
具体实施方式
20.如图1所示,一种并联式两自由度运动平台包含压电叠堆驱动器1、桥式放大机构2、平行四边形机构3、力放大机构4、载物平台6、机架7和底座10;
21.机架7安装在底座10上,机架7上镜像布置有两个力放大机构4,每个力放大机构4由一个压电叠堆驱动器1驱动,桥式放大机构2由两个力放大机构4驱动,平行四边形机构3的输入端与桥式放大机构2的输出端相连,平行四边形机构3通过连接杆8与载物平台6相连,驱动载物平台6在水平面上沿横向和纵向两个方向运动。
22.在使用时,对压电叠堆驱动器1施加通过功率放大器放大后的电压,压电叠堆驱动器1伸长,压电叠堆驱动器1驱动力放大机构4,通过力放大四杆机构4将压电叠堆驱动器1的驱动力进行放大,并作用在桥式放大机构2上,桥式放大机构2对压电叠堆驱动器1的形变量进行放大,平行四边形机构3对桥式放大机构2传递过来的形变量进行解耦,使其只沿一个方向平动,平行四边形机构3以其与机架7的铰链为支点,实现载物平台6在x方向(横向)或y方向(纵向)的平动。当压电叠堆驱动器1失去电压时,力放大机构4、桥式放大机构2和平行四边形机构3复位,载物平台6回到初始位置。
23.本实施方式的优点在于:通过力放大机构4、桥式放大机构2和平行四边形机构3实现对压电叠堆驱动器1的输出力放大及位移的放大和解耦,提高运动平台反应快速性并使得运动平台具有两个维度方向上的大行程。桥式放大机构2采用柔性铰链,并通过线切割加工而成,整个柔性铰链放大机构为一个整体,具有体积小、无机械摩擦、导向精度高、加工精度易于保证和不需要装配的优点。重量轻、操作方便,适用于微操作机器人系统和微机电系统。
24.一个实施例,如图1-图3所示,每个所述力放大机构4包含主动摇杆41、摇杆42和连杆43;主动摇杆41与机架7之间布置有压电叠堆驱动器1,主动摇杆41通过柔性铰链与机架7相连,主动摇杆41通过柔性铰链与摇杆42相连,摇杆42通过柔性铰链与连杆43相连,连杆43通过柔性铰链与机架7相连,摇杆42输出端与桥式放大机构2相抵靠。所述桥式放大机构2为五连杆通过柔性铰链串接而成的放大机构。
25.如图8所示,压电叠堆驱动器1施加通过功率放大器放大后的电压,压电叠堆驱动器1伸长,压电叠堆驱动器1将主动摇杆41向外推,主动摇杆41向外推,主动摇杆41以其与机架7的铰链为支点、使主动摇杆41的另一端向外摆动;在连杆43与摇杆42的铰链的作用下,连杆43的一端也向外运动,以摇杆42的一角为支点,使桥式放大机构2的连杆向内摆动,从而驱使桥式放大机构2的中间的连杆运动,在该连杆与机架7铰链的作用下,平行四边形机构3以其与机架7的铰链为支点,在连接杆8的作用下,通过平行四边形机构3,实现带动载物平台6向x方向或y方向平动。
26.另一个实施例中,所述桥式放大机构2为五连杆通过柔性铰链串接而成的放大机构。所述平行四边形机构3包含中心台31和叶型柔性铰链32;中心台31通过叶型柔性铰链32
分别与连接杆和机架相连,多个连接杆之间通过叶形柔性铰链32相连,桥式放大机构2的输出端与中心台31相连。
27.力放大机构4及桥式放大机构2并联布置,平行四边形机构3对运动进行解耦,桥式放大机构2的延伸端为平行四边形机构的驱动件。
28.如图4-图6所示,所述载物平台6包含驱动台61和载物台62;连接杆8分为连接短杆81和连接长杆82;驱动台61的一个侧面通过连接短杆81与平行四边形机构3相连,且连接短杆81可相对驱动台61纵向滑动,驱动台61上与所述一个侧面相邻的两侧面分别与连接长杆82相连,且连接长杆82可相对驱动台61横向滑动,驱动台61由两个载物台62夹持,一个载物台62与两个活动杆9相连,两个活动杆9可相对机架7沿横向和纵向运动。
29.如图4和图5所示,连接长杆82在y方向上与驱动台16的滑轨配合,长连接杆82能沿x向滑动,带动驱动台16在y方向上运动,连接短杆81在x方向与驱动台16的滑轨配合,连接短杆81能沿y方向滑动,带动驱动台16在x方向运动,驱动台16通过黏滑运动(上、下布置的载物台62的夹持)将运动传递到载物平台6上,其中一个载物台62通过其上的固定杆92和滑杆91的相互滑动配合以及滑杆91在机架7内的滑道配合,从而保证载物台62按照x、y方向运动。
30.通常,连接长杆82为l形杆。
31.当两个压电叠堆驱动器1同时施加相同的电压,由于两个力放大机构4对称布置,通过桥式放大机构2和平行四边形机构3的放大和解耦,在连接杆8、滑杆91和固定杆92的作用下,载物平台6向x方向运动。
32.当两个压电叠堆驱动器1施加不相同电压时,通过力放大机构4、桥式放大机构2和平行四边形机构3的放大和解耦,在连接杆8、滑杆91和固定杆92的作用下,载物平台6向y方向运动。
33.如图1所示,通常,主动摇杆41与摇杆42之间的柔性铰链、摇杆42与连杆43之间的柔性铰链、连杆43与机架7之间的柔性铰链以及桥式放大机构2中的柔性铰链均为双切口直圆柔性铰链。所述主动摇杆41与机架7之间的柔性铰链为叶型柔性铰链。
34.如图1所示,机架7、力放大机构4、桥式放大机构2和平行四边形机构3经线切割获得,机架7和主动摇杆41之间区域为第一切割缝隙,第一切割区域与压电叠堆驱动器1间隙配合,压电叠堆驱动器1通过预紧螺钉与主动摇杆41接触;机架7、主动摇杆41、连杆43、摇杆42围成的区域为第二切割缝隙;机架7、力放大机构4和桥式放大机构2围成的区域为第三切割缝隙;桥式放大机构2和机架7围成的区域为第四切割缝隙;平行四边形机构3中机架7、桥式放大机构2延伸端和柔性铰链之间的区域为第五切割缝隙;平行四边形机构3延伸端和机架7之间的区域为第六切割间隙;力放大机构4中摇杆42与机架7的铰链、摇杆42与连杆43的铰链、桥式放大机构2中各构件间的铰链均为双切口柔性铰链,主动摇杆41与机架7的铰链、平行四边形机构3中的铰链均为叶型柔性铰链(优选为双叶型柔性铰链或多叶型柔性铰链)。
35.如图7所示,机架7和底座10通过盖板11封装在一起,盖板11上有可使载物平台6外露和运动的活动槽,底座10为槽式结构。
36.本发明已以较佳实施案例揭示如上,然而并非用以限定本发明,任何熟悉本专业的技术人员,在不脱离本发明技术方案范围内,当可以利用上述揭示的结构及技术内容做
出些许的更动或修饰为等同变化的等效实施案例,均仍属本发明技术方案范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1