一种机械制造用的自动机械抓手及其使用方法与流程
1.本发明涉及机械抓手技术领域,更具体地涉及一种机械制造用的自动机械抓手及其使用方法。
背景技术:
2.机械抓手能够代替了人从事恶劣环境中的工作,而且能够保护人身安全,广泛应用于机械制造,自动化生产线等,大大提高了工业的生产效率。
3.在机械制造中,采用可相互夹紧的抓手结构将零件夹起,放置到预设位置或者进行安装等工作,其可以避免工作员工在长久工作时容易出错的问题,且机械抓手的工作效率远高于人工,可长时间使用,工作时精度较高。
4.机械手在工作时,经常使用的液压传动的方式传动较慢,且直接带动抓手移动,抓手受到顶出杆的运动影响,会产生较大的晃动,不易于准确抓取,一个机械抓手仅能适用一个或一类的零件夹取,需要将机械抓手的抓手位置进行焊接新的抓手,才能适用到其余零件,但是焊接后,需要将焊接的零件去除后,才能重新应用到其余场合,焊接过程,无法进行生产,因此为了适应不同的零件,需要采用多个机械抓手,而机械抓手的价格较高,需要投入太多的成本。
技术实现要素:
5.为了克服现有技术的上述缺陷,本发明提供一种机械制造用的自动机械抓手及其使用方法,本发明所要解决的技术问题是:机械抓手使用时会晃动而影响精度,且无法夹持不同的零件。
6.一种机械制造用的自动机械抓手及其使用方法,包括移动机构,还包括:
7.转动台:安装于所述移动机构的顶端,并与所述移动机构活动连接;
8.控制箱:安装于所述转动台的顶端,并与所述转动台固定连接;
9.连接柱:安装于所述控制箱的侧面,并与所述控制箱固定连接;
10.顶出机构:安装于所述连接柱远离控制箱的一侧,并与所述连接柱固定连接;
11.夹紧机构:安装于所述夹紧机构的底端,并与所述夹紧机构活动连接;
12.连接机构:安装于所述夹紧机构的底端,并与所述夹紧机构活动连接。
13.进一步的,所述夹紧机构包括保护主箱、保护侧箱,所述保护主箱顶端的内部固定连接有定位套筒,所述定位套筒的内部活动连接有顶出杆,所述顶出杆底端的两侧固定连接有连接块,两个所述连接块远离顶出杆的一侧互动连接有转动筒,所述转动筒远离连接块的侧面固定连接有移动块,所述移动块远离转动筒的侧面固定连接有连接片,所述连接片的内部固定连接有连接轴,所述连接轴的侧面活动连接有转动块,所述转动块的内部活动连接有固定轴,所述固定轴的两端与移动机构的内部固定连接,所述转动块的底端固定连接有转动齿轮,所述转动齿轮的底端传动连接有移动齿条,所述齿轮与齿条相互啮合,所述移动齿条的底端固定连接有连接机构,所述转动块与转动齿轮固定连接,所述转动块与
转动齿轮绕固定轴转动,所述固定轴位于转动齿轮的中心位置,因此转动齿轮绕固定轴转动时,移动齿条可平稳移动,所述连接块、移动块、转动块之间活动连接,可缓冲顶出杆移动时的震动,设备移动时更加平稳。
14.进一步的,所述连接机构包括连接板,所述连接板的底端固定连接有第一外壳,所述第一外壳底端的一侧固定连接有加强块,所述加强块的顶端固定连接有定位圆壳,所述定位圆壳的内侧活动连接有第一半圆弧,所述第一半圆弧的侧面固定连接有开关,所述第一外壳与定位圆壳的侧面开设有避位槽,所述开关位于第一外壳与定位圆壳的避位槽内,所述第一外壳的底端活动连接有第二外壳,所述第二外壳的底端固定连接有抓块,所述第一半圆弧的侧面设有第二半圆弧,所述第二半圆弧位于定位圆壳的内部,所述开关的侧面固定连接有弹簧柱,所述弹簧柱远离开关的一侧与第一外壳的内部固定连接,所述定位圆壳的内侧与第一半圆弧的侧面直径相同,所述开关可带动第一半圆弧在定位圆壳内转动,从而使得第一半圆弧与第二半圆弧转动后卡入到定位圆壳内,所述加强块的侧面开设有倒角,连接时方便加强块进入到第二外壳内部,连接更加牢固。
15.进一步的,所述保护主箱底端的两侧固定连接有避位板,所述避位板的内部固定连接有限位杆,所述移动齿条的内部开设有滑动孔,所述限位杆位于移动齿条的滑动孔内,所述移动齿条移动时,所述限位杆始终位于移动齿条的避位孔内,两个所述避位板的内侧距离比移动齿条的长度大三厘米,从而使得移动齿条带动移动齿条移动后,移动齿条不会与避位板接触,保证设备安全使用,保护侧箱的长度大于移动齿条的长度,从而使得移动齿条可以进入到保护侧箱内,起到避位的作用。
16.进一步的,所述移动机构包括移动机台,所述移动机台内部底端的两侧开设有滑槽,所述移动机台的滑槽内活动连接有滑轨,所述移动机台的内侧开设有螺纹孔,所述移动机台的螺纹孔内螺纹连接有转动螺杆,所述转动螺杆的一侧固定连接有挡板,所述转动螺杆的另一侧活动连接有转动电机,所述转动电机的外侧固定连接有电机外壳,所述移动机台的底端与滑轨的底端保持同一水平面,从而使得移动机台移动时更加稳定,所述电机外壳为铁质材料,且电机外壳的表面刷有防水漆,防止转动电机的顺利运行。
17.进一步的,所述连接板的侧面固定连接有电磁铁,所述电磁铁远离连接板的侧面设有有垫片,所述垫片远离电磁铁的侧面与开关固定连接,所述垫片为橡胶材质,且第一外壳与第二外壳连接时,开关通过垫片与电磁铁进行接触,垫片可保证开关与电磁铁连接时不会碰撞,增加设备的使用寿命。
18.进一步的,所述顶出机构包括固定块,所述固定块底端的两侧固定连接有连接杆,两个所述连接杆的底端固定连接有保护主箱,所述固定块底端的中心固定连接有顶出汽缸,所述顶出汽缸的底端活动连接有顶出杆,所述顶出杆的侧面活动连接有定位套筒,所述固定块与保护主箱之间设有两个连接杆进行连接,从而使得固定块与保护主箱的位置更加准确,保证保护主箱工作时的稳定性,且定位套筒保证顶出杆上下移动时的稳定性,提高设备工作的准确性。
19.本发明的技术效果和优点:
20.1、本发明通过设有转动齿轮、移动齿条、连接板、顶出杆,有利于保持设备运行时的平稳性,顶出杆顶出后,带动连接块与移动块移动,连接块与移动块移动会缓冲顶出杆移动时的晃动,转动齿轮带动移动齿条移动时,移动齿条移动的更加稳定,从而使得抓手抓取
零件是更加准确;
21.2、本发明通过设有开关、弹簧柱、第一半圆弧、定位圆壳,实现了快速更换抓手的形状,采用两个半圆弧与定位圆壳卡住,从而连接不同的抓手,可以快速进行更换,且更换过程更加简单,使得一台设备应用在不同的阶段,有利于控制成本;
22.3、本发明通过设有电磁铁、开关、垫片、加强块,有利于保证连接时的稳定性,通过采用电磁铁固定开关的位置,可以防止开关被错误触发,且加强块保证连接处的位置更加精准与稳定,;
23.4、本发明通过设有滑轨、转动螺杆、移动机台、挡板,实现了机械抓手自动移动,通过转动螺杆的转动带动进行移动,滑轨保证移动机台移动时的稳定性,从而使得移动机台带动机械抓手移动,机械抓手可自动进行工作,实用性更强。
附图说明
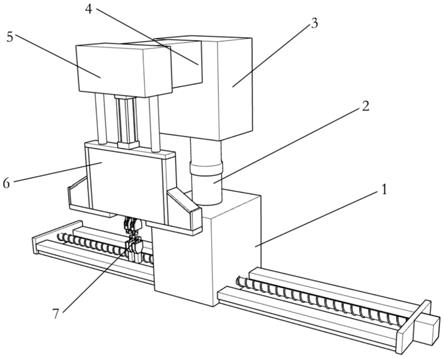
24.图1为本发明的整体结构示意图。
25.图2为本发明的顶出结构爆炸示意图。
26.图3为本发明的夹紧结构爆炸示意图。
27.图4为本发明的连接结构内部示意图。
28.图5为本发明的连接固定状态内部示意图。
29.图6为本发明的移动结构示意图。
30.附图标记为:1、移动机构;101、移动机台;102、滑轨;103、转动螺杆;104、转动电机;105、挡板;106、电机外壳;2、转动台;3、控制箱;4、连接柱;5、顶出机构;501、固定块;502、连接杆;503、顶出汽缸;504、顶出杆;505、定位套筒;6、夹紧机构;601、保护主箱;602、保护侧箱;603、连接块;604、转动筒;605、移动块;606、连接片;607、连接轴;608、转动块;609、转动齿轮;610、固定轴;611、移动齿条;612、限位杆;613、避位板;7、连接机构;701、连接板;702、第一外壳;703、电磁铁;704、开关;705、垫片;706、定位圆壳;707、第一半圆弧;708、加强块;709、弹簧柱;710、第二外壳;711、第二半圆弧;712、抓块。
具体实施方式
31.下面将结合本发明中的附图,对本发明中的技术方案进行清楚、完整地描述,另外,在以下的实施方式中记载的各结构的形态只不过是例示,本发明所涉及的机械制造用的自动机械抓手及其使用方法并不限定于在以下的实施方式中记载的各结构,在本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施方式都属于本发明保护的范围。
32.参照图1,本发明提供了一种机械制造用的自动机械抓手,包括移动机构1,还包括:
33.转动台2:安装于移动机构1的顶端,并与移动机构1活动连接;
34.控制箱3:安装于转动台2的顶端,并与转动台2固定连接;
35.连接柱4:安装于控制箱3的侧面,并与控制箱3固定连接;
36.顶出机构5:安装于连接柱4远离控制箱3的一侧,并与连接柱4固定连接;
37.夹紧机构6:安装于夹紧机构6的底端,并与夹紧机构6活动连接;
38.连接机构7:安装于夹紧机构6的底端,并与夹紧机构6活动连接。
39.参照图2和图3,夹紧机构6包括保护主箱601、保护侧箱602,保护主箱601顶端的内部固定连接有定位套筒505,定位套筒505的内部活动连接有顶出杆504,顶出杆504底端的两侧固定连接有连接块603,两个连接块603远离顶出杆504的一侧互动连接有转动筒604,转动筒604远离连接块603的侧面固定连接有移动块605,移动块605远离转动筒604的侧面固定连接有连接片606,连接片606的内部固定连接有连接轴607,连接轴607的侧面活动连接有转动块608,转动块608的内部活动连接有固定轴610,固定轴610的两端与移动机构1的内部固定连接,转动块608的底端固定连接有转动齿轮609,转动齿轮609的底端传动连接有移动齿条611,齿轮与齿条相互啮合,移动齿条611的底端固定连接有连接机构7,顶出杆504上下移动时,连接块603与移动块605带动转动齿轮609与移动齿条611绕固定轴610转动,转动齿轮609转动时带动移动齿条611移动,从而使得移动齿条611可相向移动,进行夹取,移动时更加稳定,工作时更加精确。
40.参照图4和图5,连接机构7包括连接板701,连接板701的底端固定连接有第一外壳702,第一外壳702底端的一侧固定连接有加强块708,加强块708的顶端固定连接有定位圆壳706,定位圆壳706的内侧活动连接有第一半圆弧707,第一半圆弧707的侧面固定连接有开关704,第一外壳702与定位圆壳706的侧面开设有避位槽,开关704位于第一外壳702与定位圆壳706的避位槽内,第一外壳702的底端活动连接有第二外壳710,第二外壳710的底端固定连接有抓块712,第一半圆弧707的侧面设有第二半圆弧711,第二半圆弧711位于定位圆壳706的内部,开关704的侧面固定连接有弹簧柱709,弹簧柱709远离开关704的一侧与第一外壳702的内部固定连接,通过移动开关704,从而使得第一半圆弧707转动后的侧面与定位圆壳706的侧面保持平行,使得下方的第二半圆弧711进入到定位圆壳706内,再次转动后,第二半圆弧711卡入到定位圆壳706内,进行固定,可选择不同的抓块712进行固定,一台设备可在不同的情况下工作,适应性更强。
41.参照图3,保护主箱601底端的两侧固定连接有避位板613,避位板613的内部固定连接有限位杆612,移动齿条611的内部开设有滑动孔,限位杆612位于移动齿条611的滑动孔内,移动齿条611移动时,限位杆612始终位于移动齿条611的避位孔内,移动齿条611移动时,限位杆612限制移动齿条611的移动,从而使得移动齿条611移动时更加稳定,不会产生晃动,保护侧箱602的顶端与水平方向呈四十五度夹角,尽可能节省空间的同时起到对转动齿轮609转动时的避位作用。
42.参照图6,移动机构1包括移动机台101,移动机台101内部底端的两侧开设有滑槽,移动机台101的滑槽内活动连接有滑轨102,移动机台101的内侧开设有螺纹孔,移动机台101的螺纹孔内螺纹连接有转动螺杆103,转动螺杆103的一侧固定连接有挡板105,转动螺杆103的另一侧活动连接有转动电机104,转动电机104的外侧固定连接有电机外壳106,通过转动螺杆103的转动带动移动机台101的移动,从而使得机械抓手自动进行移动,提高设备的自动性,且滑轨102保证移动机台101移动时的稳定性,挡板105保证移动机台101移动后不会出现脱轨的情况。
43.参照图4,连接板701的侧面固定连接有电磁铁703,电磁铁703远离连接板701的侧面设有有垫片705,垫片705远离电磁铁703的侧面与开关704固定连接,开关704与电磁铁703的接触面设为永磁性材料,通过设有电磁铁703,从而使得电磁铁703可自动对开关704
进行吸引与排斥,排斥时,辅助开关704向上移动克服弹簧柱709的弹力,吸引时,保证开关704不会被错误的拉开而出现连接不稳的情况。
44.参照图2,顶出机构5包括固定块501,固定块501底端的两侧固定连接有连接杆502,两个连接杆502的底端固定连接有保护主箱601,固定块501底端的中心固定连接有顶出汽缸503,顶出汽缸503的底端活动连接有顶出杆504,顶出杆504的侧面活动连接有定位套筒505,通过将液压传动改为顶出汽缸503与顶出杆504之间的气压传动,从而提高设备单位时间内的工作效率,且顶出杆504的位置由定位套筒505进行限制,减少出现误差的可能性。
45.工作原理:s1、调整设备的位置,启动转动电机104,转动电机104启动带动转动螺杆103转动,转动螺杆103转动带动移动机台101移动,滑轨102限制移动机台101移动的位置,移动机台101移动带动转动台2移动,转动台2调整设备的方向,转动台2通过控制箱3带动连接柱4移动,从而使得设备移动到预设的位置;
46.s2、抓手张开时,顶出汽缸503启动使得顶出杆504向下移动,顶出杆504向下移动带动连接块603向下移动,连接块603向下移动带动移动块605向下移动,移动块605与转动块608之间可进行转动,从而保证连接块603与顶出杆504之间保持角度稳定连接,转动块608带动转动齿轮609绕固定轴610向外转动,此时固定轴610带动移动齿条611向外滑动,移动齿条611带动连接板701向外移动,从而抓手张开,顶出汽缸503再次启动,带动顶出杆504向上移动,从而使得抓手夹紧可以抓取零件;
47.s3、更换不同的抓手时,电磁铁703通电,从而使得电磁铁703对垫片705产生斥力,转动开关704,开关704转动带动第一半圆弧707在定位圆壳706内转动,弹簧柱709被拉伸,第一半圆弧707与第二半圆弧711转动,且第一半圆弧707与第二半圆弧711之间的平面与定位圆壳706的侧面平行,可将下侧的抓手取出,更换新的抓手后,将加强块708插入到第一外壳702内,第一半圆弧707与第二半圆弧711之间完全接触,反向转动开关704,弹簧柱709的拉力带动设备进行复位,复位后,电磁铁703反向通电,保证电磁铁703吸住开关704,开关704不会被错误触发,完成更换。
48.最后应说明的几点是:首先,在本技术的描述中,需要说明的是,除非另有规定和限定,术语“安装”、“相连”、“连接”应做广义理解,可以是机械连接或电连接,也可以是两个元件内部的连通,可以是直接相连,“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变,则相对位置关系可能发生改变;
49.其次:本发明公开实施例附图中,只涉及到与本公开实施例涉及到的结构,其他结构可参考通常设计,在不冲突情况下,本发明同一实施例及不同实施例可以相互组合;
50.最后:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1