机械臂的腕关节、机械臂以及机器人的制作方法
本技术涉及机器人领域,更具体地,涉及一种机械臂的腕关节、机械臂以及机器人。
背景技术:
1、随着机器人技术的发展,类人型机器人一直是机器人发展的一个主要方向,比如dlr类人机械手臂、hrp系列人形机器人等等。这些机器人都有一些共性,都是通过模仿人体结构设计的,并在制造业、医疗、服务等领域有广泛的应用前景。
2、目前,这些类人型机器人的机械臂存在多个关节,并且每个关节处设置有驱动模块(例如,驱动电机和减速器),并且驱动模块的重量一般都是较大的,例如,可能占机械臂的总重量的60%左右,因此,可能会造成机械臂的末端转动惯量偏大,从而导致机械臂的末端速度受到了限制,无法进行高速运动,并且可能失控。另一方面,类人型机器人可以应用于人机交互的场景,此时如果机械臂由于转动惯量过大,则可能会造成与其交互的人员伤害。
3、因此,需要一种末端转动惯量较低的机械臂,从而提高机器人的可靠性并和安全性。
技术实现思路
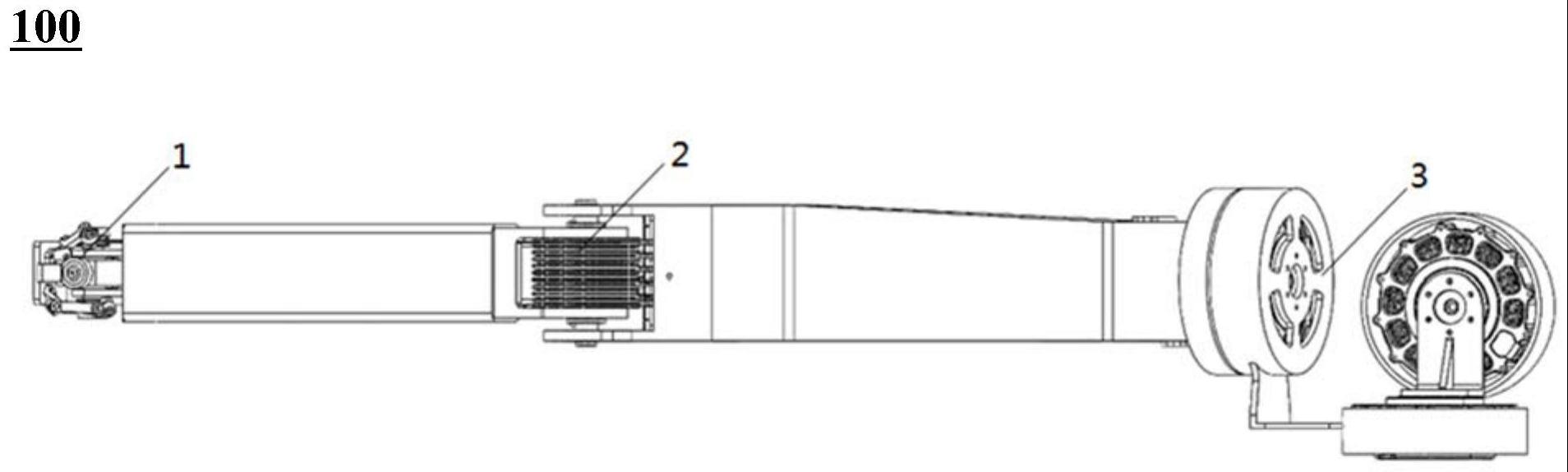
1、根据本技术的一方面,提供了一种机械臂中的腕关节。该腕关节包括末端固定板,用于固定末端执行器;中心轴固定座,连接到所述末端固定板;第一线轮组件和第二线轮组件,对称设置在所述中心轴固定座的第一相对两侧且相对于所述中心轴固定座的轴线转动,并且分别根据基于线状组件的驱动力转动;以及连接机构,与所述第一线轮组件和所述第二线轮组件连接,用于将所述第一线轮组件和所述第二线轮组件分别连接到所述末端固定板,使得所述末端固定板根据所述第一线轮组件和所述第二线轮组件的转动而转动。
2、根据一些实施例,所述第一线轮组件和第二线轮组件中的每一者包括:线轮,所述线轮的线轮轴上设置有以相反方向缠绕的两条线状组件,并且每条线状组件的第一端固定在所述线轮轴上,第二端与外部驱动模块连接,用于根据来自外部驱动模块的基于线状组件的驱动力转动。
3、根据一些实施例,在所述第一线轮组件和所述第二线轮组件均沿着相同旋转方向转动的情况下,所述末端固定板能够沿着侧倾方向转动;并且,在所述第一线轮组件和所述第二线轮组件沿着不同旋转方向转动的情况下,所述末端固定板能够沿着俯仰方向转动。
4、根据一些实施例,所述连接机构包括多个连杆,所述第一线轮组件和所述第二线轮组件对应的连杆集合相对于所述中心轴固定座是对称的,并且每个连杆集合包括第一连杆、第二连杆和第三连杆,其中:所述第一连杆连接在对应的一个线轮组件和所述第二连杆之间;所述第二连杆连接在所述第一连杆和所述第三连杆之间;所述第三连杆连接在所述第二连杆和所述末端固定板之间;所述连接机构中的两个第四连杆的第一端分别连接到垂直于所述末端固定板的方向上所述中心轴固定座除了所述第一相对两侧的第二相对两侧,第二端分别连接到所述末端固定板。
5、根据一些实施例,所述第一线轮组件和第二线轮组件中的每一者还包括:转速传感器,与所述线轮相关联地设置,用于检测所述线轮的转速,以提供给处理装置。
6、根据本技术的另一方面,还提供了一种机械臂。该机械臂,包括:腕关节、肘关节和肩关节,其中所述腕关节为根据如上所述的腕关节;第一机臂和第二机臂,其中,所述肩关节与肘关节之间的为第一机臂,肘关节与腕关节之间的为第二机臂;驱动模块,用于驱动所述腕关节、所述肘关节、和所述肩关节。
7、根据一些实施例,所述驱动模块包括:第一驱动模块,设置在所述第一机臂靠近所述肩关节的一端,并且用于通过驱动第一组线状组件的收放来控制所述腕关节;第二驱动模块,用于驱动所述肘关节;以及第三驱动模块,与所述肩关节集成设置,用于驱动或实现所述肩关节。
8、根据一些实施例,所述肘关节包括:第一连接座,用于与所述第一机臂连接;第二连接座,用于与所述第二机臂连接;滑轮机构,与所述第一连接座和所述第二连接座连接,用于基于第二组线状组件的收放来分别使所述第二机臂向朝着所述第一机臂的方向移动和远离所述第一机臂的方向转动,其中,所述第二组线状组件与多个线轮形成动滑轮组。
9、根据一些实施例,所述多个线轮包括一个中心大线轮和多个小线轮,所述多个小线轮中的第一部分小线轮、所述中心大线轮和所述第二组线状组件中的第一条线状组件用于形成第一动滑轮组,所述多个小线轮中的第二部分小线轮、所述中心大线轮和所述述第二组线状组件中的第二条线状组件用于形成第二动滑轮组,其中,当所述第一条线状组件收紧时,所述中心大线轮绕着转轴转动使得所述第二机臂向朝着所述第一机臂的方向转动;并且当所述第二条线状组件收紧时,所述中心大线轮绕着转轴转动使得所述第二机臂向远离所述第一机臂的方向转动。
10、根据一些实施例,所述第二驱动模块设置在所述第一机臂靠近所述肩关节的一端,并且与所述第一驱动模块集成设置或者非集成设置。
11、根据一些实施例,所述第一驱动模块包括与所述第一线轮组件和所述第二线轮组件分别对应的两个线轮驱动子模块,所述第二驱动模块包括一个线轮驱动子模块,其中,每个线轮驱动子模块包括线轮驱动电机和线轮驱动轴,所述第一组线状组件或所述第二组线状组件中的两条线状组件以相反方向缠绕在对应的线轮驱动轴上,并且每个线轮驱动子模块包括的线轮驱动轴被对应的线轮驱动电机驱动,用于驱动所述第一组线状组件或所述第二组线状组件中的两条线状组件的收紧。
12、根据一些实施例,所述第一组线状组件中的每条线状组件的第一端固定在对应的线轮驱动轴上,第二端经过所述肘关节在所述腕关节的第一线轮组件和第二线轮组件中的一者的线轮轴上缠绕后固定在所述线轮轴上。
13、根据一些实施例,所述肩关节由所述第三驱动模块直接驱动,所述第三驱动模块包括与三个自由度对应的、相互垂直设置的第一驱动子模块、第二驱动子模块和第三驱动子模块,并且所述第一驱动子模块与所述第一机臂靠近所述肩关节的一端连接;所述第二驱动子模块通过第一驱动连接座与所述第一机臂连接,并且所述第三驱动子模块通过第二驱动连接座与所述第二驱动子模块连接。
14、根据一些实施例,第一驱动子模块、第二驱动子模块和第三驱动子模块中的每一者包括驱动电机和所述驱动电机对应的电动轴,所述第一驱动连接座的第一端连接到所述第一驱动子模块的驱动电机对应的电动轴,并且第二端连接到所述第二驱动子模块的驱动电机对应的电动轴;所述第二驱动连接座的第一端连接到所述第二驱动子模块的驱动电机对应的电动轴,并且第二端连接到所述第三驱动子模块的驱动电机对应的电动轴。
15、根据本技术的另一方面,还提供了一种机器人,该机器人包括如上所述的机械臂。
16、根据本技术的实施例提供的腕关节、机械臂和机器人,其通过将至少一部分驱动模块设置在大臂端而不是设置在关节处,其中采用用线状组件来驱动的具有连杆机构的腕关节,可以使机械臂末端的转动惯量较低,能实现较快地转动速度,且腕关节具有更大的运动范围和灵活性。此外,还可选地采用用线状组件来驱动的结合了动滑轮组的肘关节,进一步可以降低机械臂末端的转动惯量,并且增加机械臂肘关节的承载。此外,肩关节采用了直接驱动结构,且满足三自由度的情况下控制十分简单。
- 还没有人留言评论。精彩留言会获得点赞!