一种3D拆垛机器人及其工装夹具的制作方法
一种3d拆垛机器人及其工装夹具
技术领域
1.本发明涉及工业机器人技术领域,尤其涉及一种3d拆垛机器人,以及一种3d拆垛机器人的工装夹具。
背景技术:
2.工业生产加工,经常需要对物料进行码垛和拆垛。通过人工操作,每个工位都需要一名作业员按生产需求将料框内的物料搬运至传输带上,不仅工作强度高,且工作效率低。因此,自动化生产线的机器人逐渐代替了人工操作。
3.目前的一些拆垛机器人,通过简单的夹爪搬运物料,这些夹爪结构简单,但是灵活性较差,难以应对不同姿态的物料,夹爪不能有效地抓取形状不太规则的物料,导致物料夹持稳定性差,物料容易发生掉落,可能损坏物料包装。
技术实现要素:
4.为解决背景技术中存在的技术问题,本发明提出一种3d拆垛机器人及其工装夹具。
5.本发明提出了一种3d拆垛机器人的工装夹具,包括固定板和夹爪组件,其中:
6.固定板上固定安装有安装法兰,安装法兰用于安装在3d拆垛机器人上;
7.多个夹爪组件并排安装在固定板上;
8.夹爪组件包括缓冲部件和夹持部件,夹持部件通过缓冲部件与固定板连接,缓冲部件使夹持部件在垂直于固定板端面的方向上可浮动,夹持部件用于夹持物料。
9.优选地,缓冲部件包括安装板、导向柱、轴套和压力弹簧,安装板上固定安装有至少两个导向柱,导向柱上滑动安装有轴套,轴套固定安装在固定板上,导向柱上套设有压力弹簧,并且压力弹簧位于安装板与固定板之间。
10.优选地,夹持部件包括驱动件和两个夹头,驱动件与两个夹头连接,可选择性地驱动两个夹头相互靠近或相互远离。
11.优选地,驱动件为气动夹指,气动夹指包括气缸、活塞杆、两个杠杆和两个滑块,气缸固定在安装板上,活塞杆活动安装在气缸内部,杠杆转动安装在气缸上,两个滑块滑动安装在气缸外端,活塞杆一端通过两个杠杆分别与两个滑块连接,活塞杆可驱动两个滑块相向滑动或相背滑动,两个滑块上均固定安装有一个夹头。
12.优选地,夹头的形状为l形。
13.优选地,安装法兰包括法兰板和定位盘,法兰板上设有螺栓安装孔,定位盘固定在法兰板上,定位盘上设有定位孔,定位盘中心设有磁吸轴头。
14.本发明还提出了一种3d拆垛机器人,包括机械手和上述的工装夹具,工装夹具通过安装法兰与机械手的末端轴连接。
15.本发明的3d拆垛机器人的工装夹具,具有并排安装在固定板上的多个夹具组件,每个夹具组件通过夹持部件夹持物料,夹持部件通过缓冲部件可进行浮动。在工作时,可对
物料的不同部位进行夹持,保证物料被夹持稳定;能起到缓冲撞击力的作用,保护物料和夹具;多个夹具组件还可以抵达不同高度的位置上对物料进行夹持,从而能应当不同姿态的物料,具有较好的灵活性。
附图说明
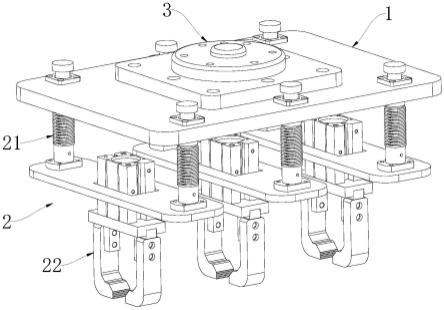
16.图1为实施例中提出的一种3d拆垛机器人的工装夹具的立体图;
17.图2为实施例中的工装夹具的侧视图;
18.图3为实施例中的加持部件的透视图;
19.图4为实施例中的工装夹具俯视视角的立体图;
20.图5为实施例中的一种3d拆垛机器人的主视图;
21.图6为图5中的3d拆垛机器人的后视图。
具体实施方式
22.请参照图1-6所示,根据本发明实施例的一种3d拆垛机器人及其工装夹具。该工装夹具包括固定板1和夹爪组件2。其中,固定板1上固定安装有安装法兰3,安装法兰3用于将该工装夹具安装在3d拆垛机器人上。
23.多个夹爪组件2并排安装在固定板1上。每个夹爪组件2均包括缓冲部件21和夹持部件22,夹持部件22通过缓冲部件21与固定板1连接,缓冲部件21可使夹持部件22在垂直于固定板1端面方向上具有一定的可浮动范围,夹持部件22用于夹持物料。
24.在工作时,3d拆垛机器人在拆垛过程中可通过该工装夹具来夹持垛上的物料。该工装夹具上的多个夹爪组件2可同时工作,并且对物料的不同部位进行夹持,从而可保证物料被夹持稳定。
25.由于缓冲部件21使得夹持部件22可具有可浮动范围,当夹持部件22抵触到物料表面时,一方面,可减小冲撞力,能起到保护物料和工装夹具的作用。另一方面,可使多个夹爪组件2可以抵达不同高度的位置上对物料进行夹持,因而具有较好的灵活性,能达到更好的夹持效果。
26.在本实施例中,固定板1上并排安装有三个夹爪组件2。夹爪组件2的缓冲部件21包括安装板211、导向柱212、轴套213和压力弹簧214。安装板211上固定安装有至少两个导向柱212,导向柱212上滑动安装有轴套213,轴套213固定安装在固定板1上。导向柱212上套设有压力弹簧214,并且压力弹簧214位于安装板211与固定板1之间。
27.夹持部件22包括驱动件和两个夹头221,驱动件与两个夹头221连接,可选择性地驱动两个夹头221相互靠近或相互远离。
28.参照图3,驱动件具体为气动夹指,气动夹指包括气缸222、活塞杆223、两个杠杆224和两个滑块225。气缸222固定在安装板211上,活塞杆223活动安装在气缸222内部,杠杆224转动安装在气缸222上,两个滑块225滑动安装在气缸222外端,活塞杆223一端通过两个杠杆224分别与两个滑块225连接,活塞杆223可驱动两个滑块225相向滑动或相背滑动。两个滑块225上均固定安装有一个夹头221,夹头221的形状为l形。
29.如图5和6所示,该工装夹具可安装在3d拆垛机器人上,3d拆垛机器人还包括机械手4,机械手4为四轴机械手4,工装夹具通过安装法兰3与机械手4的末端轴连接。
30.具体地,机械手4的末端轴上设有电磁吸盘,电磁吸盘上安装有定位销。工作夹具的安装法兰3包括法兰板31和定位盘32。法兰板31上设有螺栓安装孔33,法兰板31通过螺栓装入螺栓安装孔33与固定板1连接。定位盘32固定在法兰板31上,定位盘32上设有定位孔34,定位盘32中心设有磁吸轴头35。在安装时,可使定位盘32上的定位孔34与电磁吸盘上的定位销配合,并且通过电磁吸盘将定位盘32上的磁吸轴头35吸住。
31.根据本实施例的3d拆垛机器人及其工装夹具,在进行拆垛工作时,可先通过3d视觉系统对物料垛扫描,扫描后进行数据分析并且将物料姿态和位置数据反馈给3d拆跺机器人,3d拆跺机器人再根据反馈的数据对物料垛上的物料进行搬运,直至完成拆跺任务。
32.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
技术特征:
1.一种3d拆垛机器人的工装夹具,其特征在于,包括固定板(1)和夹爪组件(2),其中:固定板(1)上固定安装有安装法兰(3),安装法兰(3)用于安装在3d拆垛机器人上;多个夹爪组件(2)并排安装在固定板(1)上;夹爪组件(2)包括缓冲部件(21)和夹持部件(22),夹持部件(22)通过缓冲部件(21)与固定板(1)连接,缓冲部件(21)使夹持部件(22)在垂直于固定板(1)端面的方向上可浮动,夹持部件(22)用于夹持物料。2.根据权利要求1所述的3d拆垛机器人的工装夹具,其特征在于,缓冲部件(21)包括安装板(211)、导向柱(212)、轴套(213)和压力弹簧(214),安装板(211)上固定安装有至少两个导向柱(212),导向柱(212)上滑动安装有轴套(213),轴套(213)固定安装在固定板(1)上,导向柱(212)上套设有压力弹簧(214),并且压力弹簧(214)位于安装板(211)与固定板(1)之间。3.根据权利要求2所述的3d拆垛机器人的工装夹具,其特征在于,夹持部件(22)包括驱动件和两个夹头(221),驱动件与两个夹头(221)连接,可选择性地驱动两个夹头(221)相互靠近或相互远离。4.根据权利要求3所述的3d拆垛机器人的工装夹具,其特征在于,驱动件为气动夹指,气动夹指包括气缸(222)、活塞杆(223)、两个杠杆(224)和两个滑块(225),气缸(222)固定在安装板(211)上,活塞杆(223)活动安装在气缸(222)内部,杠杆(224)转动安装在气缸(222)上,两个滑块(225)滑动安装在气缸(222)外端,活塞杆(223)一端通过两个杠杆(224)分别与两个滑块(225)连接,活塞杆(223)可驱动两个滑块(225)相向滑动或相背滑动,两个滑块(225)上均固定安装有一个夹头(221)。5.根据权利要求4所述的3d拆垛机器人的工装夹具,其特征在于,夹头(221)的形状为l形。6.根据权利要求1所述的3d拆垛机器人的工装夹具,其特征在于,安装法兰(3)包括法兰板(31)和定位盘(32),法兰板(31)上设有螺栓安装孔(33),定位盘(32)固定在法兰板(31)上,定位盘(32)上设有定位孔(34),定位盘(32)中心设有磁吸轴头(35)。7.一种3d拆垛机器人,包括机械手(4),其特征在于,还包括如权利要求1-6任意一项所述的工装夹具,工装夹具通过安装法兰(3)与机械手(4)的末端轴连接。
技术总结
本发明公开了一种3D拆垛机器人及其工装夹具,该工装夹具包括固定板和夹爪组件,固定板上固定安装有安装法兰,安装法兰用于安装在3D拆垛机器人上,多个夹爪组件并排安装在固定板上,夹爪组件包括缓冲部件和夹持部件,夹持部件通过缓冲部件与固定板连接,缓冲部件使夹持部件在垂直于固定板端面的方向上可浮动,夹持部件用于夹持物料。具有该工装夹具的3D拆垛机器人可对物料的不同部位进行夹持,保证物料被夹持稳定,能起到缓冲撞击力的作用,保护物料和夹具,具有较好的灵活性。具有较好的灵活性。具有较好的灵活性。
技术研发人员:于晓东 左勤平 黄富立 张玉辉 陈帅
受保护的技术使用者:芜湖固高自动化技术有限公司
技术研发日:2022.05.11
技术公布日:2022/8/8
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1