一种信号采集器装配定位装置及定位方法与流程
1.本发明属于信号采集器装配技术领域,具体是一种用于船舶舰桥的信号采集器的装配定位装置及定位方法。
背景技术:
2.随着社会的快速发展,航海技术得到了快速的发展,船舶舰桥越来越智能化和信息化,船舶舰桥上通常会安装信号采集器;
3.现有的船舶舰桥信号采集器装配时采用人工装配的方式,成本比较高,而且容易出现装配不到位的情况,装配品质无法得到保证,同时长时间装配工作量大,对操作人员的要求较高,且损坏后维修的难度较大,影响生产效率和生产质量。
技术实现要素:
4.本发明的目的在于克服现有技术的缺陷,提供一种船舶舰桥信号采集器装配定位装置及定位方法。
5.为实现上述目的,本发明采用了如下技术方案:
6.一种船舶舰桥信号采集器装配定位装置及定位方法,包括主体架,所述主体架采用“l”型结构,所述主体架水平端上方安装有立杆,所述立杆上滑动安装有升降架,所述升降架的一侧转动安装有转盘,所述升降架的另一侧安装有通过螺栓固定有伺服电机,所述伺服电机的输出轴与所述转盘的一侧中心处连接;
7.所述主体架的上方安装有升降调节气缸,所述升降调节气缸的活塞杆与所述升降架的底部连接,所述转盘远离所述升降架的一侧设置有夹持机构,所述夹持机构用于夹持固定信号采集器。
8.在一种可能的实现方式中,所述夹持机构包括水平滑杆、定夹板以及动夹板,所述水平滑杆的一端固定在所述转盘上,所述定夹板可拆卸的安装在所述水平滑杆的另一端,所述动夹板滑动安装在两个所述水平滑杆和所述定夹板之间,所述转盘靠近所述动夹板的一侧安装有夹紧气缸,所述夹紧气缸的活塞杆与所述动夹板的一侧连接。
9.在一种可能的实现方式中,所述水平滑杆共设置有多个,多个所述水平滑杆呈环形阵列分布在所述转盘上。
10.在一种可能的实现方式中,所述水平滑杆的一端设置有螺杆,所述螺杆上旋合有两个锁紧螺母,所述锁紧螺母位于所述动夹板的两侧。
11.在一种可能的实现方式中,所述立杆共设置有两个,两个所述立杆关于所述主体架的竖直中心线相互对称。
12.在一种可能的实现方式中,所述升降调节气缸设置在两个所述立杆之间,所述升降架内部嵌设有滑套,所述滑套滑动套接在所述立杆上。
13.在一种可能的实现方式中,所述主体架的竖直端外侧设置有配线盒,所述主体架的一侧设置有控制器,所述控制器的输出端与所述升降调节气缸、所述伺服电机和所述夹
紧气缸的输入端电性连接。
14.在一种可能的实现方式中,所述转盘靠近所述升降架的一侧安装有限位杆,所述升降架靠近所述转盘的一侧开设有限位槽,所述限位槽呈圆形结构,所述限位槽内滑动安装有球珠,所述限位杆的一端与所述球珠转动连接。
15.在一种可能的实现方式中,所述定夹板和所述动夹板的内侧采用圆弧形结构。
16.本发明还公开了一种船舶舰桥信号采集器装配定位装置的定位方法,具体步骤如下:
17.(s1)、将信号采集器外壳放置于所述主体架的水平端上方;
18.(s2)、将信号采集器放置于所述定夹板和所述动夹板之间,通过控制器控制夹紧气缸运行,推动动夹板移动,配合定夹板夹紧信号采集器;
19.(s3)、通过控制器控制所述升降调节气缸运行,所述升降调节气缸推动升降架上升,使夹持在定夹板和所述动夹板之间的信号采集器上升,直至信号采集器超出动夹板顶部的部分高度小于动夹板底部与信号采集器外壳之间的间距;
20.(s4)、通过控制器控制伺服电机运行,伺服电机带动转盘转动180
°
;
21.(s5)、通过控制器控制所述升降调节气缸运行,所述升降调节气缸带动升降架下降,使信号采集器下降与信号采集器外壳对位,通过螺栓信号采集器下降与信号采集器外壳固定连接;
22.(s6)、通过控制器控制所述夹紧气缸运行,推动动夹板移动,使动夹板远离定夹板,取出信号采集器。
23.本发明中,装配定位装置采用半自动化的设计,能够减轻操作人员的工作量,减少人力费用,装配的效率高,而且装配更加的稳定,能够提高信号采集器装配的品质稳定性,能够进一步提高企业的竞争力,同时能够加快工作人员迅速熟练工作岗位,而且整个船舶舰桥信号采集器装配定位装置的结构简单,成本较低,使用效果好;
24.本发明中,通过在水平滑杆的一端设置有螺杆,螺杆上旋合有两个锁紧螺母,锁紧螺母位于动夹板的两侧,这样的结构设置使得当锁紧螺母在进行旋转时可以带动定夹板的位置进行调整,使该装置可适用的产品大小型号种类更多,提升了该装置的适用性,且在锁紧螺母旋下后,定夹板和动夹板均可从水平滑杆上滑下,因此方便对定夹板和动夹板进行更换;
25.本发明中,通过在转盘靠近升降架的一侧安装有限位杆,升降架靠近转盘的一侧开设有限位槽,限位槽呈圆形结构,限位槽内滑动安装有球珠,限位杆的一端与球珠转动连接,这样的结构设置使得转盘在旋转时,通过限位杆的限位作用可以使转盘转动稳定性更高,且限位杆可以承担伺服电机输出轴的压力,保证伺服电机的使用寿命。
附图说明
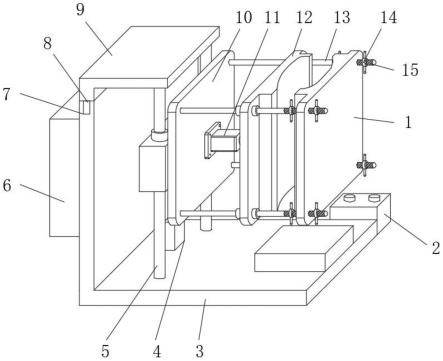
26.图1是本发明的整体结构示意图;
27.图2是本发明的局部俯视图;
28.图3是本发明中升降架侧视图。
29.附图标记:1、定夹板;2、控制器;3、主体架;4、升降调节气缸;5、立杆;6、配线盒;7、卡槽;8、卡板;9、顶板;10、转盘;11、夹紧气缸;12、动夹板;13、水平滑杆;14、锁紧螺母;15、
螺杆;16、伺服电机;17、升降架;18、滑套;19、限位杆;20、限位槽;21、球珠。
具体实施方式
30.以下结合附图1-3,进一步说明本发明一种船舶舰桥信号采集器装配定位装置及定位方法的具体实施方式。本发明一种船舶舰桥信号采集器装配定位装置及定位方法不限于以下实施例的描述。
31.实施例1:
32.本实施例给出一种船舶舰桥信号采集器装配定位装置及定位方法,如图1-3所示,包括主体架3,主体架3采用“l”型结构,主体架3水平端上方安装有立杆5,立杆5上滑动安装有升降架17,升降架17的一侧转动安装有转盘10,升降架17的另一侧安装有通过螺栓固定有伺服电机16,伺服电机16的输出轴与转盘10的一侧中心处连接;
33.主体架3的上方安装有升降调节气缸4,升降调节气缸4的活塞杆与升降架17的底部连接,转盘10远离升降架17的一侧设置有夹持机构,夹持机构用于夹持固定信号采集器。
34.夹持机构包括水平滑杆13、定夹板1以及动夹板12,水平滑杆13的一端固定在转盘10上,定夹板1可拆卸的安装在水平滑杆13的另一端,动夹板12滑动安装在两个水平滑杆13和定夹板1之间,转盘10靠近动夹板12的一侧安装有夹紧气缸11,夹紧气缸11的活塞杆与动夹板12的一侧连接。
35.主体架3的竖直端外侧设置有配线盒6,主体架3的一侧设置有控制器2,控制器2的输出端与升降调节气缸4、伺服电机16和夹紧气缸11的输入端电性连接。
36.一种船舶舰桥信号采集器装配定位装置的定位方法,具体步骤如下:
37.s1、将信号采集器外壳放置于主体架3的水平端上方;
38.s2、将信号采集器放置于定夹板1和动夹板12之间,通过控制器2控制夹紧气缸11运行,推动动夹板12移动,配合定夹板1夹紧信号采集器;
39.s3、通过控制器2控制升降调节气缸4运行,升降调节气缸4推动升降架17上升,使夹持在定夹板1和动夹板12之间的信号采集器上升,直至信号采集器超出动夹板12顶部的部分高度小于动夹板12底部与信号采集器外壳之间的间距;
40.s4、通过控制器2控制伺服电机16运行,伺服电机16带动转盘10转动180
°
;
41.s5、通过控制器2控制升降调节气缸4运行,升降调节气缸4带动升降架17下降,使信号采集器下降与信号采集器外壳对位,通过螺栓信号采集器下降与信号采集器外壳固定连接;
42.s6、通过控制器2控制夹紧气缸11运行,推动动夹板12移动,使动夹板12远离定夹板1,取出信号采集器。
43.通过采用上述技术方案:
44.本发明中的装配定位装置采用半自动化的设计,能够减轻操作人员的工作量,减少人力费用;
45.本发明中的装配定位装置采用半自动化的设计,装配的效率高,而且装配更加的稳定,能够提高信号采集器装配的品质稳定性,能够进一步提高企业的竞争力;
46.本发明记载的装配定位装置能够降低岗位难度,能够加快工作人员迅速熟练工作岗位,而且整个船舶舰桥信号采集器装配定位装置的结构简单,成本较低,使用效果好。
47.实施例2:
48.本实施例给出一种船舶舰桥信号采集器装配定位装置及定位方法,如图1-3所示,包括主体架3,主体架3采用“l”型结构,主体架3水平端上方安装有立杆5,立杆5上滑动安装有升降架17,升降架17的一侧转动安装有转盘10,升降架17的另一侧安装有通过螺栓固定有伺服电机16,伺服电机16的输出轴与转盘10的一侧中心处连接;
49.主体架3的上方安装有升降调节气缸4,升降调节气缸4的活塞杆与升降架17的底部连接,转盘10远离升降架17的一侧设置有夹持机构,夹持机构用于夹持固定信号采集器。
50.夹持机构包括水平滑杆13、定夹板1以及动夹板12,水平滑杆13的一端固定在转盘10上,定夹板1可拆卸的安装在水平滑杆13的另一端,动夹板12滑动安装在两个水平滑杆13和定夹板1之间,转盘10靠近动夹板12的一侧安装有夹紧气缸11,夹紧气缸11的活塞杆与动夹板12的一侧连接。
51.水平滑杆13共设置有多个,多个水平滑杆13呈环形阵列分布在转盘10上。
52.水平滑杆13的一端设置有螺杆15,螺杆15上旋合有两个锁紧螺母14,锁紧螺母14位于动夹板12的两侧。
53.立杆5共设置有两个,两个立杆5关于主体架3的竖直中心线相互对称。
54.升降调节气缸4设置在两个立杆5之间,升降架17内部嵌设有滑套18,滑套18滑动套接在立杆5上。
55.主体架3的竖直端外侧设置有配线盒6,主体架3的一侧设置有控制器2,控制器2的输出端与升降调节气缸4、伺服电机16和夹紧气缸11的输入端电性连接。
56.一种船舶舰桥信号采集器装配定位装置的定位方法,具体步骤如下:
57.s1、将信号采集器外壳放置于主体架3的水平端上方;
58.s2、将信号采集器放置于定夹板1和动夹板12之间,通过控制器2控制夹紧气缸11运行,推动动夹板12移动,配合定夹板1夹紧信号采集器;
59.s3、通过控制器2控制升降调节气缸4运行,升降调节气缸4推动升降架17上升,使夹持在定夹板1和动夹板12之间的信号采集器上升,直至信号采集器超出动夹板12顶部的部分高度小于动夹板12底部与信号采集器外壳之间的间距;
60.s4、通过控制器2控制伺服电机16运行,伺服电机16带动转盘10转动180
°
;
61.s5、通过控制器2控制升降调节气缸4运行,升降调节气缸4带动升降架17下降,使信号采集器下降与信号采集器外壳对位,通过螺栓信号采集器下降与信号采集器外壳固定连接;
62.s6、通过控制器2控制夹紧气缸11运行,推动动夹板12移动,使动夹板12远离定夹板1,取出信号采集器。
63.通过采用上述技术方案:
64.该装置通过在水平滑杆13的一端设置有螺杆15,螺杆15上旋合有两个锁紧螺母14,锁紧螺母14位于动夹板12的两侧,这样的结构设置使得当锁紧螺母14在进行旋转时可以带动定夹板1的位置进行调整,使该装置可适用的产品大小型号种类更多,提升了该装置的适用性,且在锁紧螺母14旋下后,定夹板1和动夹板12均可从水平滑杆13上滑下,因此方便对定夹板1和动夹板12进行更换。
65.实施例3:
66.本实施例给出一种船舶舰桥信号采集器装配定位装置及定位方法,如图1-3所示,包括主体架3,主体架3采用“l”型结构,主体架3水平端上方安装有立杆5,立杆5上滑动安装有升降架17,升降架17的一侧转动安装有转盘10,升降架17的另一侧安装有通过螺栓固定有伺服电机16,伺服电机16的输出轴与转盘10的一侧中心处连接;
67.主体架3的上方安装有升降调节气缸4,升降调节气缸4的活塞杆与升降架17的底部连接,转盘10远离升降架17的一侧设置有夹持机构,夹持机构用于夹持固定信号采集器。
68.夹持机构包括水平滑杆13、定夹板1以及动夹板12,水平滑杆13的一端固定在转盘10上,定夹板1可拆卸的安装在水平滑杆13的另一端,动夹板12滑动安装在两个水平滑杆13和定夹板1之间,转盘10靠近动夹板12的一侧安装有夹紧气缸11,夹紧气缸11的活塞杆与动夹板12的一侧连接。
69.水平滑杆13共设置有多个,多个水平滑杆13呈环形阵列分布在转盘10上。
70.水平滑杆13的一端设置有螺杆15,螺杆15上旋合有两个锁紧螺母14,锁紧螺母14位于动夹板12的两侧。
71.立杆5共设置有两个,两个立杆5关于主体架3的竖直中心线相互对称。
72.升降调节气缸4设置在两个立杆5之间,升降架17内部嵌设有滑套18,滑套18滑动套接在立杆5上。
73.主体架3的竖直端外侧设置有配线盒6,主体架3的一侧设置有控制器2,控制器2的输出端与升降调节气缸4、伺服电机16和夹紧气缸11的输入端电性连接。
74.转盘10靠近升降架17的一侧安装有限位杆19,升降架17靠近转盘10的一侧开设有限位槽20,限位槽20呈圆形结构,限位槽20内滑动安装有球珠21,限位杆19的一端与球珠21转动连接。
75.定夹板1和动夹板12的内侧采用圆弧形结构。
76.本发明还公开了一种船舶舰桥信号采集器装配定位装置的定位方法,具体步骤如下:
77.s1、将信号采集器外壳放置于主体架3的水平端上方;
78.s2、将信号采集器放置于定夹板1和动夹板12之间,通过控制器2控制夹紧气缸11运行,推动动夹板12移动,配合定夹板1夹紧信号采集器;
79.s3、通过控制器2控制升降调节气缸4运行,升降调节气缸4推动升降架17上升,使夹持在定夹板1和动夹板12之间的信号采集器上升,直至信号采集器超出动夹板12顶部的部分高度小于动夹板12底部与信号采集器外壳之间的间距;
80.s4、通过控制器2控制伺服电机16运行,伺服电机16带动转盘10转动180
°
;
81.s5、通过控制器2控制升降调节气缸4运行,升降调节气缸4带动升降架17下降,使信号采集器下降与信号采集器外壳对位,通过螺栓信号采集器下降与信号采集器外壳固定连接;
82.s6、通过控制器2控制夹紧气缸11运行,推动动夹板12移动,使动夹板12远离定夹板1,取出信号采集器。
83.通过采用上述技术方案:
84.该装置中通过在转盘10靠近升降架17的一侧安装有限位杆19,升降架17靠近转盘10的一侧开设有限位槽20,限位槽20呈圆形结构,限位槽20内滑动安装有球珠21,限位杆19
的一端与球珠21转动连接,这样的结构设置使得转盘10在旋转时,通过限位杆19的限位作用可以使转盘10转动稳定性更高,且限位杆19可以承担伺服电机16输出轴的压力,保证伺服电机16的使用寿命。
85.实施例4:
86.本实施例给出一种船舶舰桥信号采集器装配定位装置及定位方法,如图1-3所示,包括主体架3,主体架3采用“l”型结构,主体架3水平端上方安装有立杆5,立杆5上滑动安装有升降架17,升降架17的一侧转动安装有转盘10,升降架17的另一侧安装有通过螺栓固定有伺服电机16,伺服电机16的输出轴与转盘10的一侧中心处连接;
87.主体架3的上方安装有升降调节气缸4,升降调节气缸4的活塞杆与升降架17的底部连接,转盘10远离升降架17的一侧设置有夹持机构,夹持机构用于夹持固定信号采集器。
88.夹持机构包括水平滑杆13、定夹板1以及动夹板12,水平滑杆13的一端固定在转盘10上,定夹板1可拆卸的安装在水平滑杆13的另一端,动夹板12滑动安装在两个水平滑杆13和定夹板1之间,转盘10靠近动夹板12的一侧安装有夹紧气缸11,夹紧气缸11的活塞杆与动夹板12的一侧连接。
89.水平滑杆13共设置有多个,多个水平滑杆13呈环形阵列分布在转盘10上。
90.水平滑杆13的一端设置有螺杆15,螺杆15上旋合有两个锁紧螺母14,锁紧螺母14位于动夹板12的两侧。
91.立杆5共设置有两个,两个立杆5关于主体架3的竖直中心线相互对称。
92.升降调节气缸4设置在两个立杆5之间,升降架17内部嵌设有滑套18,滑套18滑动套接在立杆5上。
93.主体架3的竖直端外侧设置有配线盒6,主体架3的一侧设置有控制器2,控制器2的输出端与升降调节气缸4、伺服电机16和夹紧气缸11的输入端电性连接。
94.转盘10靠近升降架17的一侧安装有限位杆19,升降架17靠近转盘10的一侧开设有限位槽20,限位槽20呈圆形结构,限位槽20内滑动安装有球珠21,限位杆19的一端与球珠21转动连接。
95.定夹板1和动夹板12的内侧采用圆弧形结构。
96.主体架3的上方设置有顶板9,顶板9呈倒l型结构,顶板9的竖直端下方安装有卡板8,主体架3的竖直端顶部开设有卡槽7,卡板8插合在卡槽7内并通过螺栓固定,顶板9的水平端下方嵌设有插孔,立柱5顶部插接在插孔内。
97.本发明还公开了一种船舶舰桥信号采集器装配定位装置的定位方法,具体步骤如下:
98.s1、将信号采集器外壳放置于主体架3的水平端上方;
99.s2、将信号采集器放置于定夹板1和动夹板12之间,通过控制器2控制夹紧气缸11运行,推动动夹板12移动,配合定夹板1夹紧信号采集器;
100.s3、通过控制器2控制升降调节气缸4运行,升降调节气缸4推动升降架17上升,使夹持在定夹板1和动夹板12之间的信号采集器上升,直至信号采集器超出动夹板12顶部的部分高度小于动夹板12底部与信号采集器外壳之间的间距;
101.s4、通过控制器2控制伺服电机16运行,伺服电机16带动转盘10转动180
°
;
102.s5、通过控制器2控制升降调节气缸4运行,升降调节气缸4带动升降架17下降,使
信号采集器下降与信号采集器外壳对位,通过螺栓信号采集器下降与信号采集器外壳固定连接;
103.s6、通过控制器2控制夹紧气缸11运行,推动动夹板12移动,使动夹板12远离定夹板1,取出信号采集器。
104.通过采用上述技术方案:
105.该装置中主体架3的上方设置有顶板9,顶板9呈倒l型结构,顶板9的竖直端下方安装有卡板8,主体架3的竖直端顶部开设有卡槽7,卡板8插合在卡槽7内,这样的结构设置使得顶板9可以为立杆5的顶部提供支撑,使立杆5稳定性更高,且这样的结构设置使得升降架17以及安装在升降架17上的结构部件出现损坏时,可以通过先将顶板9拆下,然后将升降调节气缸4的活塞杆与升降架17分离,最后取下升降架17以及安装在升降架17上的损坏结构部件进行维修即可,操作方便快捷。
106.以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1