一种工业机器人用管线固定结构及其固定方法与流程
1.本发明涉及工业机器人管线固定技术领域,尤其是涉及一种工业机器人用管线固定结构及其固定方法。
背景技术:
2.工业机器人被广泛的应用于当代的工业生产活动中,工业机器人根据实际的生产需要,其外形存在差异,但是其主体结构以及工作原理相同,均是由多个机械臂首尾相连,且连接处通过电机进行控制转动,因此为了保证电机的稳定供电,需要在机器人的外部安装管线。
3.现有的工业机器人安装管线时往往是在安装时,放出足够的位移量,以此来保证机器人转动时,电机工作电路的畅通。
4.上述中的现有技术方案存在以下缺陷:机器人频繁的转动会导致连接线绝缘层破损,同时机器人回转式连接管线没有及时复位会导致连接管线缠绕。
技术实现要素:
5.本发明的目的是提供一种能避免管线频繁弯曲扭转而破损,同时能避免管线缠绕在机器人机械臂外表面上的工业机器人用管线固定结构及其固定方法。
6.为实现上述目的,本发明提供了如下技术方案:一种工业机器人用管线固定结构,包括第一安装座,所述第一安装座的一侧外表面上固定连接有内连接管,所述内连接管的外部套接固定有连接轴承,所述连接轴承的外部套接固定有第二安装座,所述第二安装座的内部安装槽内卡扣安装有电性连接插座,所述内连接管的内壁上固定安装有两根导电杆,所述电性连接插座的下表面上设置有两个连接槽,且连接槽的内部卡扣安装有弹性导电环,所述导电杆置于连接槽的内部,且贴合在弹性导电环的外表面上。
7.通过采用上述技术方案,可以利用连接轴承保证第一安装座和第二安装座的相对转动,进而使得该机器人关节处在旋转时,能有效的避免连接线缠绕在机械臂上,保证了工作电路的通畅。
8.进一步地,其中一根所述导电杆位于内连接管的中轴位置处,另一根所述导电杆位于中轴处导电杆的一侧,所述电性连接插座内部的两个弹性导电环共中心轴,两根所述导电杆的一端均固定连接有电性接头。
9.通过采用上述技术方案,可以进一步的确保导电杆与弹性导电环之间的连接稳定性,进一步的保证了电能的供应顺畅性。
10.进一步地,所述第二安装座的一侧外表面上固定连接有编码器安装座,所述编码器安装座的安装槽内安装有角度编码器。
11.通过采用上述技术方案,可以便捷的安装角度编码器,使得该装置具备关节处转动角度检测的结构和功能。
12.进一步地,所述编码器安装座的侧表面上设置有螺纹孔,且螺纹孔的内部螺纹连接有固定螺栓,所述固定螺栓的一端抵在角度编码器的外表面上。
13.通过采用上述技术方案,可以进一步的提高角度编码器安装的便利性。
14.进一步地,所述角度编码器与外部的pcl控制器电性连接,所述第一安装座的一侧外表面上固定安装有声光报警器,所述声光报警器与外部的pcl控制器电性连接。
15.通过采用上述技术方案,可以实时的将角度编码器检测的角度转动参数传递至外部的plc控制器中,并利用外部plc控制器来控制声光报警器的工作,利用声光报警器的工作来提醒工作人员该机器人运转异常。
16.进一步地,所述第一安装座的一侧外表面上固定连接有第二限位支架,所述第二限位支架的一端通过螺丝固定安装有第一限位支架,所述第一限位支架侧表面的一端设置有限位连接孔,所述角度编码器的联动轴穿插在第一限位支架外表面上的限位连接孔内。
17.通过采用上述技术方案,利用第一限位支架和第二限位支架来确保第一安装座和第二安装座相对转动时,角度编码器能发生转动,保证了机器人关节处转动角度参数的检测能稳定进行。
18.进一步地,所述电性连接插座的外部设置有电性连接插头,所述电性连接插头安插在电性连接插座侧表面的插孔内,所述电性连接插头的连接线外部套接有连接线固定支架。
19.通过采用上述技术方案,可以便捷的对该装置的进行装卸操作,有效的提高了该装置的安装便利性。
20.进一步地,其固定方法为:a1:首先,将机器人关机处的电机连接线与电性接头连接,然后将第一安装座固定安装在机器人的外表面上,且第二安装座与机器人关节处电机共旋转中心轴,接着将电性连接插头安插在电性连接插座的插孔内,并将连接线固定支架的一端固定安装在机器人外表面上,且连接线固定支架和第一安装座分别安装在机器人旋转连接的两个机械臂上,接着再将角度编码器和声光报警器分别与外部pcl控制器电性连接;a2:此时可以正常的使用该装置,在导电杆、弹性导电环的连通下,可以有效的保证机器人关节处电机的工作电路通畅,当机器人关节处的电机发生转动时,在连接轴承和连接线固定支架的作用下,第一安装座和第二安装座之间相对转动,由于两个弹性导电环始终与导电杆贴合,因此能保证电机工作电路的通畅;a3:与此同时,由于第二限位支架与第一安装座固定连接,第一限位支架与第二限位支架固定连接,角度编码器的联动轴限位安插在第一限位支架侧表面上的限位插孔内,因此当第一安装座与第二安装座发生相对转动时,角度编码器的内部发生旋转,此时能有效的检测出转动角度,并将该数据传递至外部pcl控制器中;a4:外部的pcl控制器同时接收角度编码器和机器人控制端发送的转动参数,并对两者数据进行对比,当角度编码器检测的数据大于机器人控制端发送的参数时,向声光报警器通电,此时声光报警器工作报警,使得该装置具备机器人关节处转动角度监测功能。
21.通过采用上述技术方案,可以利用第一安装座和第二安装座的相对转动来避免机器人关节处转动时,连接线出现缠绕的现象,保证了工作电路的通畅,同时角度编码器能实时的检测机器人关节处转动的角度参数,并传递至外部pcl控制器中,将检测的数据与设定
的数据进行对比,一旦出现检测的数据大于设定的数据时,对声光报警器通电,提醒工作人员该机器人关节处运转异常。
22.综上所述,本发明的有益技术效果为:1、通过连接轴承的设置,能有效的保证第一安装座和第二安装座之间的相对转动,保证了机器人关节处发生转动时,机器人的连接线不会出现相互缠绕的现象,工作稳定性高,同时电性连接插座和电性连接插头的设置,能有效的实现快速拆装的操作,安装便利性和实用性更强;2、通过角度编码器和声光报警器的设置,可以利用角度编码器来实时的检测机器人关节处的转动角度数据,并将该数据传递至外部的pcl控制器中,且与机器人控制端发送的转动参数进行对比,当检测的参数大于设定的参数时,向声光报警器通电,此时声光报警器发出报警声,以此来提醒工作人员运行异常。
附图说明
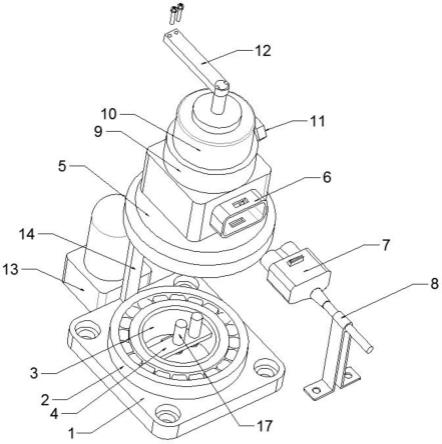
23.图1为本发明的立体结构示意图;图2为本发明的立体底部示意图。
24.图中,1、第一安装座;2、连接轴承;3、内连接管;4、内安装板;5、第二安装座;6、电性连接插座;7、电性连接插头;8、连接线固定支架;9、编码器安装座;10、角度编码器;11、固定螺栓;12、第一限位支架;13、声光报警器;14、第二限位支架;15、电性接头;16、弹性导电环;17、导电杆。
具体实施方式
25.以下对本发明作进一步详细说明。
26.参照图1和图2,一种工业机器人用管线固定结构,包括第一安装座1,第一安装座1的一侧外表面上固定连接有内连接管3,内连接管3的外部套接固定有连接轴承2,连接轴承2的外部套接固定有第二安装座5,第二安装座5的内部安装槽内卡扣安装有电性连接插座6,内连接管3的内壁上固定安装有两根导电杆17,电性连接插座6的下表面上设置有两个连接槽,且连接槽的内部卡扣安装有弹性导电环16,导电杆17置于连接槽的内部,且贴合在弹性导电环16的外表面上,此举可以利用连接轴承2来保证第一安装座1和第二安装座5之间能相对转动,同时利用导电杆17与弹性导电环16的紧密贴合来保证机器人关节处电机的工作电路通畅,有效的避免了机器人关节处转动时,连接线不会发生缠绕的现象,保证了工作稳定的同时,提高了实用性。
27.参照图1和图2,其中一根导电杆17位于内连接管3的中轴位置处,另一根导电杆17位于中轴处导电杆17的一侧,电性连接插座6内部的两个弹性导电环16共中心轴,两根导电杆17的一端均固定连接有电性接头15,电性连接插座6的外部设置有电性连接插头7,电性连接插头7安插在电性连接插座6侧表面的插孔内,电性连接插头7的连接线外部套接有连接线固定支架8,其中电性连接插头7和电性连接插座6的设置,使得该装置为组合式连接,提高了该装置的装卸便利性,进一步的提高了该装置的实用性。
28.参照图1,第二安装座5的一侧外表面上固定连接有编码器安装座9,编码器安装座9的安装槽内安装有角度编码器10,编码器安装座9的侧表面上设置有螺纹孔,且螺纹孔的
内部螺纹连接有固定螺栓11,固定螺栓11的一端抵在角度编码器10的外表面上,此举可以便捷的安装角度编码器10,并利用角度编码器10来实时的检测机器人关节处转动的角度。
29.参照图1,角度编码器10与外部的pcl控制器电性连接,第一安装座1的一侧外表面上固定安装有声光报警器13,声光报警器13与外部的pcl控制器电性连接,第一安装座1的一侧外表面上固定连接有第二限位支架14,第二限位支架14的一端通过螺丝固定安装有第一限位支架12,第一限位支架12侧表面的一端设置有限位连接孔,角度编码器10的联动轴穿插在第一限位支架12外表面上的限位连接孔内,此举可以将角度编码器10检测的转动参数与控制端设定的角度参数进行对比操作,当检测的参数大于控制端设定的参数时,向声光报警器13通电,利用声光报警器13的工作来提醒工作人员该机器人关节处转动异常。
30.工作原理:首先,将机器人关机处的电机连接线与电性接头15连接,然后将第一安装座1固定安装在机器人的外表面上,且第二安装座5与机器人关节处电机共旋转中心轴,接着将电性连接插头7安插在电性连接插座6的插孔内,并将连接线固定支架8的一端固定安装在机器人外表面上,且连接线固定支架8和第一安装座1分别安装在机器人旋转连接的两个机械臂上,接着再将角度编码器10和声光报警器13分别与外部pcl控制器电性连接,此时可以正常的使用该装置,在导电杆17、弹性导电环16的连通下,可以有效的保证机器人关节处电机的工作电路通畅,当机器人关节处的电机发生转动时,在连接轴承2和连接线固定支架8的作用下,第一安装座1和第二安装座5之间相对转动,由于两个弹性导电环16始终与导电杆17贴合,因此能保证电机工作电路的通畅,与此同时,由于第二限位支架14与第一安装座1固定连接,第一限位支架12与第二限位支架14固定连接,角度编码器10的联动轴限位安插在第一限位支架12侧表面上的限位插孔内,因此当第一安装座1与第二安装座5发生相对转动时,角度编码器10的内部发生旋转,此时能有效的检测出转动角度,并将该数据传递至外部pcl控制器中,外部的pcl控制器同时接收角度编码器10和机器人控制端发送的转动参数,并对两者数据进行对比,当角度编码器10检测的数据大于机器人控制端发送的参数时,向声光报警器13通电,此时声光报警器13工作报警,使得该装置具备机器人关节处转动角度监测功能。
31.本具体实施方式的实施例均为本发明的较佳实施例,并非依此限制本发明的保护范围,故:凡依本发明的结构、形状、原理所做的等效变化,均应涵盖于本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1