一种新型幕墙安装吊装机械臂的制作方法
1.本发明涉及建筑施工技术领域,具体为一种新型幕墙安装吊装机械臂。
背景技术:
2.目前,现有的建筑工地施工用卸料平台都是固定长度的,在施工过程中总存在不同的楼栋安装幕墙时需要不同角度和位置的转换,但是施工现场的吊装机械臂都是吊绳式机械臂,这样一方面增加了吊装难度,另一方面会导致大型幕墙吊装不当出现损坏等现象,造成不必要的经济损失。
3.所以,如何设计一种新型幕墙安装吊装机械臂,成为我们当前要解决的问题。
技术实现要素:
4.本发明的目的在于提供一种新型幕墙安装吊装机械臂,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:一种新型幕墙安装吊装机械臂,包括底板,所述底板正上方连接有圆台,所述底板与所述圆台焊接连接,所述圆台正上方安装有中央控制器,所述中央控制器表面电镀有金属铜薄膜,所述中央控制器上连接有摆动构件,所述摆动构件由钛钢锻造而成,所述摆动构件两边开设有活塞连接孔,所述中央控制器正上方连接有橡胶减震垫,所述中央控制器与所述橡胶减震垫通过橡胶型弹性胶粘连连接,所述橡胶减震垫正上方安装有旋转副,所述旋转副表面电镀有耐腐蚀铬金属薄膜,所述旋转副与所述大臂焊接连接,所述大臂左上方安装有吸盘主板,所述吸盘主板表面连接有框架梁,所述吸盘主板与所述框架梁焊接连接。
6.进一步的,所述吸盘主板表面开设有连接凹槽,所述连接凹槽与大臂铆合连接,所述框架梁正上方安装有真空吸盘,所述真空吸盘为直径53mm的蘑菇形吸盘。
7.进一步的,所述连接凹槽内部安装有传动电线,所述传动电线表面为耐腐蚀绝缘层,所述底板侧面安装有连通构件,所述底板与所述连通构件铆合连接。
8.进一步的,所述连通构件正上方连接有扶手,所述扶手正下方连接有螺纹柱,所述连通构件与所述螺纹柱尺寸相合。
9.进一步的,所述螺纹柱正下方连接有支撑橡胶脚垫,所述支撑橡胶脚垫底部设有耐酸保护层。
10.进一步的,所述底板正下方设置有车轮,所述车轮为万向轮。
11.与现有技术相比,本发明的有益效果是:这种吊装机械臂可以按照需求改变幕墙安装的角度和位置,这不仅使得在吊装过程中能够减少吊装难度,降低吊装运输成本,同时也能大幅度增加工作效率,此外,该吊装设备底部安装有支撑橡胶脚垫和车轮,一方面方车轮对机械臂提供了运输便利,另一方面在机械臂进行吊装时,支撑橡胶脚垫能够使平台达到相对稳定的状态,为精准施工创造条件。
附图说明
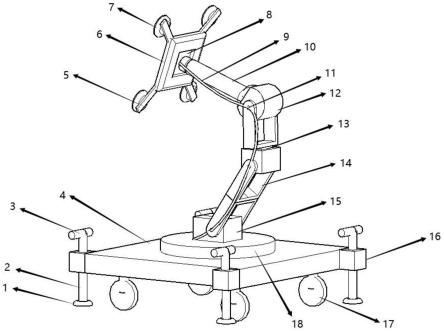
12.图1是本发明的整体示意图;
13.图2是本发明的底部平面结构示意图;
14.图3是本发明的侧边平面结构示意图;
15.图中:1-支撑橡胶脚垫;2-螺纹柱;3-扶手;4-底板;5-框架梁;6-吸盘主板;7-真空吸盘;8-连接凹槽;9-传动电线;10-大臂;11-活塞连接孔;12-旋转副;13-橡胶减震垫;14-摆动构件;15-中央控制器;16-连通构件;17-车轮;18-圆台。
具体实施方式
16.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
17.请参阅图1-3,本发明提供一种技术方案:一种新型幕墙安装吊装机械臂,包括前挡板,包括底板4,所述底板4正上方连接有圆台18,所述底板4与所述圆台18焊接连接,所述圆台18正上方安装有中央控制器15,所述中央控制器15表面电镀有金属铜薄膜,所述中央控制器15上连接有摆动构件14,所述摆动构件14由钛钢锻造而成,所述摆动构件14两边开设有活塞连接孔11,所述中央控制器15正上方连接有橡胶减震垫13,所述中央控制器15与所述橡胶减震垫13通过橡胶型弹性胶粘连连接,所述橡胶减震垫13正上方安装有旋转副12,所述旋转副12表面电镀有耐腐蚀铬金属薄膜,所述旋转副12与所述大臂10焊接连接,所述大臂10左上方安装有吸盘主板6,所述吸盘主板6表面连接有框架梁5,所述吸盘主板6与所述框架梁5焊接连接。
18.进一步的,所述吸盘主板6表面开设有连接凹槽8,所述连接凹槽8与大臂10铆合连接,所述框架梁5正上方安装有真空吸盘7,所述真空吸盘7为直径53mm的蘑菇形吸盘。
19.进一步的,所述连接凹槽8内部安装有传动电线9,所述传动电线9表面为耐腐蚀绝缘层,所述底板4侧面安装有连通构件16,所述底板4与所述连通构件16铆合连接。
20.进一步的,所述连通构件16正上方连接有扶手3,所述扶手3正下方连接有螺纹柱2,所述连通构件16与所述螺纹柱2尺寸相合。
21.进一步的,所述螺纹柱2正下方连接有支撑橡胶脚垫1,所述支撑橡胶脚垫1底部设有耐酸保护层。
22.进一步的,所述底板4正下方设置有车轮17,所述车轮17为万向轮。
23.工作原理:本发明在施使用过程中,先收起车轮17,在旋转扶手3使支撑橡胶脚垫1支起,再控制中央控制器15调整吸盘主板6的位置,待工人清理完成幕墙和真空吸盘7表面后,即可控制中央控制器15对幕墙进行吸附吊装,并移动至指定位置,据此控制机械臂对幕墙进行吊装,以适应整体需求。
24.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
技术特征:
1.一种新型幕墙安装吊装机械臂,包括前挡板,包括底板(4),所述底板(4)正上方连接有圆台(18),所述底板(4)与所述圆台(18)焊接连接,所述圆台(18)正上方安装有中央控制器(15),所述中央控制器(15)表面电镀有金属铜薄膜,所述中央控制器(15)上连接有摆动构件(14),所述摆动构件(14)由钛钢锻造而成,所述摆动构件(14)两边开设有活塞连接孔(11),所述中央控制器(15)正上方连接有橡胶减震垫(13),所述中央控制器(15)与所述橡胶减震垫(13)通过橡胶型弹性胶粘连连接,所述橡胶减震垫(13)正上方安装有旋转副(12),所述旋转副(12)表面电镀有耐腐蚀铬金属薄膜,所述旋转副(12)与所述大臂(10)焊接连接,所述大臂(10)左上方安装有吸盘主板(6),所述吸盘主板(6)表面连接有框架梁(5),所述吸盘主板(6)与所述框架梁(5)焊接连接。2.根据权利要求1所述的一种新型幕墙安装吊装机械臂,其特征在于:所述吸盘主板(6)表面开设有连接凹槽(8),所述连接凹槽(8)与大臂(10)铆合连接,所述框架梁(5)正上方安装有真空吸盘(7),所述真空吸盘(7)为直径53mm的蘑菇形吸盘。3.根据权利要求1所述的一种新型幕墙安装吊装机械臂,其特征在于:所述传动电线(9)表面为耐腐蚀绝缘层,所述底板(4)侧面安装有连通构件(16),所述底板(4)与所述连通构件(16)铆合连接。4.根据权利要求1所述的一种新型幕墙安装吊装机械臂,其特征在于:所述连通构件正上方连接有扶手,所述扶手正下方连接有螺纹柱,所述连通构件与所述螺纹柱尺寸相合。5.根据权利要求1所述的一种新型幕墙安装吊装机械臂,其特征在于:所述螺纹柱(2)正下方连接有支撑橡胶脚垫(1),所述支撑橡胶脚垫(1)底部设有耐酸保护层。6.根据权利要求1所述的一种新型幕墙安装吊装机械臂,其特征在于:所述底板(4)正下方设置有车轮(17),所述车轮(17)为万向轮。
技术总结
本发明公开了一种新型幕墙安装吊装机械臂,包括底板,所述底板正上方连接有圆台,所述底板与所述圆台焊接连接,所述圆台正上方安装有中央控制器,所述中央控制器表面电镀有金属铜薄膜,所述中央控制器上连接有摆动构件,所述摆动构件由钛钢锻造而成,所述摆动构件两边开设有前活塞连接孔,所述中央控制器正上方连接有橡胶减震垫,所述中央控制器与所述橡胶减震垫通过橡胶型弹性胶粘连连接,所述橡胶减震垫正上方安装有旋转副,所述旋转副表面电镀有耐腐蚀铬金属薄膜,所述旋转副与所述大臂焊接连接,所述大臂左上方安装有吸盘主板,所述吸盘主板表面连接有框架梁,所述吸盘主板与所述框架梁焊接连接,所述吸盘主板表面开设有连接凹槽,所述连接凹槽与大臂铆合连接,这种吊装机械臂可以按照需求改变幕墙安装的角度和位置,这不仅使得在吊装过程中能够减少吊装难度,降低吊装运输成本,同时也能大幅度增加工作效率。作效率。作效率。
技术研发人员:朱雅雯 宫建鲁
受保护的技术使用者:中国十七冶集团有限公司
技术研发日:2022.07.14
技术公布日:2022/9/15
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1