一种大工作空间冗余驱动六自由度航天器对接用调姿平台的制作方法
1.本发明涉及航天器对接用工装领域,具体为一种大工作空间冗余驱动六自由度航天器对接用调姿平台。
背景技术:
2.航天器总装过程中,存在诸如太阳翼安装、相机安装、天线安装等关键部件的高精度对接过程。太阳翼的安装过程中要保证太阳翼和帆板驱动机构在六个自由度上的精度要求,目前传统的航天器对接工艺过程基于手动调姿的架车或两轴转台和经纬仪,调姿过程中,因俯仰、偏航、滚动三个指标互相耦合,每调整完一个指标后,均需对其他两项指标进行复测,根据结果进行进一步调整,并逐步逼近,对操作者操作技能要求高,整个过程操作复杂、耗时巨大,严重影响了航天器总装的可靠性和精度。
3.航天器对接调姿设备逐渐向着智能化方向发展,智能化的前提是足够的自动化设备,目前,在航天器对接调姿领域中,经常使用六自由度并联机构作为自动化设备的位姿调整装置。在此应用场景中,不仅对六自由度并联机构的位姿精度有很高的要求,而且对负载能力也提出了更高的要求。目前,大负载的六自由度并联机构一般是采用液压驱动,然而,液压驱动的六自由度并联机构的定位精度并不能满足特殊应用的需求。电驱动六自由度并联机构可以达到非常高的定位精度。然而,高精度的电驱动六自由度并联机构的负载能力有限,不能满足大负载应用的需求。在电驱动单元的负载能力不变的条件下提高六自由度并联机构的总体负载能力,对于解决兼顾六自由度并联机构的高精度和大负载的问题具有重要意义。
4.六自由度并联机构不仅具有刚度高、承载能力强、位置误差不累积等特点,而且相较于其他自由度的并联机构,其更加灵活、精度更加高,因此六自由度并联机构可用于航天器对接调姿自动化装备。在确保六自由度并联机构优势的前提下,如何进一步改善构型和结构已经成为一个研究热点,虽然目前已经衍生出各种各样的并联机构,但大部分机构依旧存在以下一些技术问题:
①
为实现六自由度采用了较多的支链,使机构复杂化,难以确保整体结构简单化、运动精度高和好的稳定性;
②
由于支链较多,容易导致支链之间相互干涉进而影响到机构某些自由度的运动范围。因此为了满足航天器位姿调整中高精度和大负载的需求,需要改进现有的六自由度并联机构。
技术实现要素:
5.本发明为了解决现有技术中航天器对接技术粗糙,电驱动六自由度并联机构负载能力有限,不能兼顾高精度和大负载,以及支链过多等问题,提供了一种大工作空间冗余驱动六自由度航天器对接用调姿平台。
6.本发明是通过如下技术方案来实现的:一种大工作空间冗余驱动六自由度航天器对接用调姿平台,包括触地板、调姿台以及连接在调姿台与触地板之间的n条支链,n≥3,所述调姿台呈长方体状结构,所述调姿台通过n条支链对应安装于n个触地板上;所述调姿台
包括调姿台台板,所述调姿台台板的下表面上留有n个定位孔;所述触地板包含触地板上平台和触地板下平台,所述触地板上平台和触地板下平台通过竖直的连接架连接为一体,所述触地板上平台上开有弧形槽,所述弧形槽给安装支链预留了通过空间;n条支链结构相同,所述支链为三自由度并联驱动机构与球副串联而形成的混联机构,每条支链包含一个平行四边形放大机构,所述平行四边形放大机构构成执行单元,包括平行四边形机构第一连接杆、平行四边形机构第二连接杆、平行四边形机构第三连接杆与平行四边形机构第四连接杆;所述平行四边形机构第一连接杆与平行四边形机构第四连接杆通过平行四边形机构第一转动副r1连接,所述平行四边形机构第一连接杆与平行四边形机构第二连接杆通过平行四边形机构第二转动副r2连接,所述平行四边形机构第二连接杆与平行四边形机构第三连接杆通过平行四边形机构第三转动副r3连接;所述平行四边形机构第三连接杆与平行四边形机构第四连接杆通过平行四边形机构第四转动副r4连接;所述平行四边形机构第一转动副r1通过支链第一连接杆连接有第一球铰s1,所述触地板下平台上设有第一球面副外球壳,所述第一球铰s1与第一球面副外球壳相应连接;所述平行四边形机构第三转动副r3与另一转动副r5互相垂直,且两者一体形成了u副u1,所述平行四边形放大机构通过转动副r5与法兰盘模块a连接 ,所述法兰盘模块由法兰盘与垂直于法兰盘的两个连接板固定连接而成,所述转动副r5连接于法兰盘模块的连接板上;所述法兰盘与调姿台台板下表面的定位孔匹配螺栓连接;所述触地板上平台的下表面上设有驱动单元,包括第一移动副p1、第二移动副p2与第三移动副p3;所述第一移动副p1、第二移动副p2与第三移动副p3均采用可实现直线伸缩运动的驱动器作为主动驱动器,所述第一移动副p1通过第一直杆件两端的球副s2与球副s3连接于平行四边形机构第二连接杆,所述第二移动副p2通过第二直杆件两端的球副s5与球副s4连接于平行四边形机构第三转动副r3,所述第三移动副p3通过第三直杆件两端的球副s6与球副s7连接于平行四边形机构第三连接杆,所述第一移动副p1及第三移动副p3与平行四边形放大机构位于同一平面上;所述第二移动副p2垂直于平行四边形放大机构所在平面。
7.本发明所设计的大工作空间冗余驱动六自由度航天器对接用调姿平台,是由调姿台、位于调姿台下部的触地板以及安装于触地板上的支链构成的,调姿台下部的触地板有n个,相应的支链也设有n个,n≥3,支链的结构完全相同,支链与调姿台的安装方式也相同,均是通过法兰盘和相应的定位孔匹配螺栓连接。本发明的调姿平台主要包括触地板、调姿台以及连接在调姿台与触地板之间的多条支链,调姿台可以为多支链调姿台,例如四支链调姿台,调姿台呈长方体状结构,具体是通过多条支链对应安装于对应的触地板上(若需要移动,有独立的移动系统)。调姿台包括调姿台台板,调姿台台板的下表面上留有n个与支链数量相应的定位孔,用于和支链上的法兰盘匹配螺栓连接。触地板用于安装和支撑支链,其主要包含触地板上平台和触地板下平台,触地板上平台和触地板下平台通过竖直的连接架连接为一体,触地板上平台上开有弧形槽,弧形槽给安装支链预留了通过空间,使支链在触地板的支撑下可以起到调节调姿平台的功能。n条支链用于给调姿平台四角进行调节姿态,而且n条支链结构完全相同,支链为三自由度并联驱动机构与球副串联而形成的混联机构,主要包含一个平行四边形放大机构,该平行四边形放大机构构成执行单元,也是整个支链的主体和基础,主要包括平行四边形机构第一连接杆、平行四边形机构第二连接杆、平行四边形机构第三连接杆与平行四边形机构第四连接杆;平行四边形机构第一连接杆与平行四
边形机构第四连接杆通过平行四边形机构第一转动副r1连接,平行四边形机构第一连接杆与平行四边形机构第二连接杆通过平行四边形机构第二转动副r2连接,平行四边形机构第二连接杆与平行四边形机构第三连接杆通过平行四边形机构第三转动副r3连接;平行四边形机构第三连接杆与平行四边形机构第四连接杆通过平行四边形机构第四转动副r4连接,四个转动副使得四个连接杆连接为一体,也使得平行四边形放大机构四边可以随着驱动而形状发生变化。为了使平行四边形放大机构与触地板下平台安装固定,在触地板下平台上设有第一球面副外球壳,平行四边形机构第一转动副r1通过支链第一连接杆连接有第一球铰s1,第一球铰s1与第一球面副外球壳相应连接,则平等四边形放大机构可以以球铰s1为轴进行一定范围的转动。平行四边形机构第三转动副r3与另一转动副r5互相垂直,为了安装方便和节省空间,使两者一体形成了u副u1,转动副r5用于使平行四边形放大机构与法兰盘模块连接。平行四边形放大机构通过转动副r5与法兰盘模块连接,法兰盘模块由法兰盘与垂直于法兰盘的两个连接板固定连接而成,转动副r5连接于法兰盘模块的连接板上;法兰盘与调姿台台板下表面的定位孔匹配螺栓连接,以实现支链与调姿台的连接。触地板上平台的下表面上还设有驱动单元,包括第一移动副p1、第二移动副p2与第三移动副p3,三个移动副驱动平行四边形放大机构,使其形状位置发生变化,实现调节的目的。第一移动副p1、第二移动副p2与第三移动副p3均采用可实现直线伸缩运动的驱动器作为主动驱动器,第一移动副p1通过第一直杆件两端的球副s2与球副s3连接于平行四边形机构第二连接杆,用于使平行四边形机构第二连接杆运动;第二移动副p2通过第二直杆件两端的球副s5与球副s4连接于平行四边形机构第三转动副r3,用于使平行四边形放大机构整体动作,整体动作时,以第一球铰s1为轴向外或向内翻动;第三移动副p3通过第三直杆件两端的球副s6与球副s7连接于平行四边形机构第三连接杆,用于使平行四边形机构第三连接杆运动。为了实现平行四边形放大机构的动作,第一移动副p1及第三移动副p3与平行四边形放大机构位于同一平面上;第二移动副p2垂直于平行四边形放大机构所在平面。驱动单元和执行单元可以形成一整个模块,模块化设计方便于拆卸。
8.本发明具体操作为:调姿台下方有n个触地板起支撑作用,n个触地板上对应安装有n个支链,所有支链并联驱动机构,每个支链均有对应的平行四边形放大机构,平行四边形放大机构为执行单元,其通过各个铰接元件进行安装;在触地板上平台设有驱动机构,包括第一移动副p1、第二移动副p2与第三移动副p3,触地板下台板上设有第一球面副外球壳,与平行四边形放大机构通过支链第一连接杆与第一球铰s1连接,当每个支链的第一移动副p1与第三移动副p3进行直线方向的移动时,第一直杆件和第三直杆件通过相应的球副驱动平行四边形机构第二连接杆和平行四边形机构第三连接杆移动或以平行四边形机构第三转动副r3(即u副u1)为轴转动;当第二移动副p2进行直线方向的移动时,第二直杆件通过相应的球副驱动u副动作,整个平行四边形放大机构以第一球铰s1为轴向外或向内翻动,这样就形成了高刚度全闭环链,使得单个支链调节了调姿台对应处的姿态。当四个支链每个支链对应的三个移动副(即12个移动副)均移动时,则可以实现调姿台六自由度的调整,也就可以实现航天器舱段的位姿(包括位置和姿态)调整,该冗余驱动方式提高了调姿平台的承载能力。
9.进一步的,为了实现调姿前调姿台的移动,所述调姿台台板的下表面四角上通过四根支撑杆各连接有一个麦克纳姆轮,所述麦克纳姆轮由麦克纳姆轮驱动电机驱动,所述
麦克纳姆轮驱动电机通过麦克纳姆轮减速器与麦克纳姆轮连接,通过控制驱动电机和减速器来控制调姿台的前进。四个麦克纳姆轮与支链协调工作,四个麦克纳姆轮组构成的全向移动轮系可以在平面内沿任意方向、任意轨迹进行连续运动,可实现整个轮系的全方位运动,以供调姿台宏动时进行全向移动,多条支链构成的微调系统供调姿台微动调整航天器位姿。初始时采用全向移动轮系进行移动,当移动到指定位置时,全向移动轮系停止工作,调整多条支链构成的微调系统着地,利用多条支链进行微调,进一步完成调姿工作。优选的,所述调姿台上表面还设有航天器支架,所述航天器支架包括水平部分和弧形部分,水平部分可放置太阳帆板等大平面待对接调姿部件,弧形部分可放置航天器舱段等圆柱形待对接调姿部件。
10.优选的,所述触地板上平台和触地板下平台之间的连接架为镂空的,这样可以减轻触地板的重量。
11.优选的,所述第二移动副p2连接的第二直杆件与平行四边形放大机构所在平面设有夹角α,0
°
≤α≤90
°
。
12.与现有技术相比本发明具有以下有益效果:本发明所提供的一种大工作空间冗余驱动六自由度航天器对接用调姿平台:
①
采用并联驱动机构,各支链的驱动的数量和形式相同,使得各支链承载能力均衡。本发明驱动单元包含12个移动副驱动,实现机身6自由度的调整,采用此种冗余驱动方式可提高承载能力,满足精度要求;
②
采用四分支实现六自由度运动,使整体平台简洁化,支链数目适中,支链之间不容易相互干涉,各自由度的运动范围较大;
③
本发明与4条支链连接的触地板与地面之间为平面副连接,各支链与调姿台通过法兰盘螺栓连接,方便拆卸和安装,为模块化设计奠定基础。
附图说明
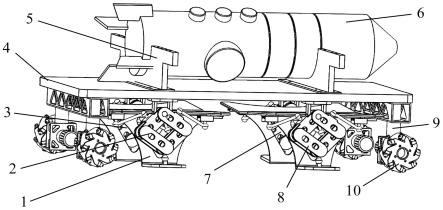
13.图1为本发明调姿平台的整体结构示意图。
14.图2为本发明调姿平台移动系统的结构示意图。
15.图3为本发明调姿台的结构示意图。
16.图4为本发明并联调姿平台支链的结构示意图。
17.图5为本发明支链的结构示意图。
18.图6为本发明触地板的结构示意图。
19.图7为本发明支链机构的运动简图。
20.图中标记如下:1-触地板,2-第一支链,3-第二支链,4-调姿台,5-航天器支架,6-航天器舱段,7-第三支链,8-第四支链,9-支撑杆,10-麦克纳姆轮,11-触地板上台板,12-第一球面副外球壳,31-触地板下台板,32-支链第一连接杆,33-第一移动副p1,34-第二移动副p2,35-第三移动副p3,36-法兰盘,37-定位孔,40-第一球铰s1,41-调姿台台板,42-麦克纳姆轮减速器,43-麦克纳姆轮驱动电机,50-平行四边形放大机构,51-平行四边形机构第一连接杆,52-平行四边形机构第二连接杆,53-平行四边形机构第三连接杆,54-平行四边形机构第四连接杆,55-平行四边形机构第一转动副r1,56-平行四边形机构第二转动副r2,57-平行四边形机构第三转动副r3,58-平行四边形机构第四转动副r4,59-转动副r5,60-u副u1,61-球副s2,62-第一直杆件,63-球副s3,64-球副s4,65-第二直杆件,66-球副s5,67-球副s6,68-第三直杆件,69-球副s7,102-连接架。
具体实施方式
21.以下结合具体实施例对本发明作进一步说明。
22.一种大工作空间冗余驱动六自由度航天器对接用调姿平台,如图1~图6所示:包括触地板1、调姿台4以及连接在调姿台4与触地板1之间的n条支链,n≥3,所述调姿台4呈长方体状结构,所述调姿台4通过n条支链对应安装于n个触地板1上;所述调姿台4包括调姿台台板41,所述调姿台台板41的下表面上留有n个定位孔37;所述触地板1包含触地板上平台11和触地板下平台31,所述触地板上平台11和触地板下平台31通过竖直的连接架102连接为一体,所述触地板上平台11上开有弧形槽,所述弧形槽给安装支链预留了通过空间;n条支链结构相同,所述支链为三自由度并联驱动机构与球副串联而形成的混联机构,每条支链包含一个平行四边形放大机构50,所述平行四边形放大机构50构成执行单元,包括平行四边形机构第一连接杆51、平行四边形机构第二连接杆52、平行四边形机构第三连接杆53与平行四边形机构第四连接杆54;所述平行四边形机构第一连接杆51与平行四边形机构第四连接杆54通过平行四边形机构第一转动副r155连接,所述平行四边形机构第一连接杆51与平行四边形机构第二连接杆52通过平行四边形机构第二转动副r256连接,所述平行四边形机构第二连接杆52与平行四边形机构第三连接杆53通过平行四边形机构第三转动副r357连接;所述平行四边形机构第三连接杆53与平行四边形机构第四连接杆54通过平行四边形机构第四转动副r458连接;所述平行四边形机构第一转动副r155通过支链第一连接杆32连接有第一球铰s140,所述触地板下平台31上设有第一球面副外球壳12,所述第一球铰s140与第一球面副外球壳12相应连接;所述平行四边形机构第三转动副r357与另一转动副r559互相垂直,且两者一体形成了u副u160,所述平行四边形放大机构50通过转动副r559与法兰盘模块a连接 ,所述法兰盘模块由法兰盘36与垂直于法兰盘36的两个连接板固定连接而成,所述转动副r559连接于法兰盘模块的连接板上;所述法兰盘36与调姿台台板41下表面的定位孔37匹配螺栓连接;所述触地板上平台11的下表面上设有驱动单元,包括第一移动副p133、第二移动副p234与第三移动副p335;所述第一移动副p133、第二移动副p234与第三移动副p335均采用可实现直线伸缩运动的驱动器作为主动驱动器,所述第一移动副p133通过第一直杆件62两端的球副s261与球副s363连接于平行四边形机构第二连接杆52,所述第二移动副p234通过第二直杆件65两端的球副s564与球副s466连接于平行四边形机构第三转动副r357,所述第三移动副p335通过第三直杆件68两端的球副s669与球副s767连接于平行四边形机构第三连接杆53,所述第一移动副p133及第三移动副p335与平行四边形放大机构50位于同一平面上;所述第二移动副p234垂直于平行四边形放大机构50所在平面。本实施例采用了以下优选方案:所述调姿台台板41的下表面四角上通过四根支撑杆9各连接有一个麦克纳姆轮10,所述麦克纳姆轮10由麦克纳姆轮驱动电机43驱动,所述麦克纳姆轮驱动电机43通过麦克纳姆轮减速器42与麦克纳姆轮10连接;所述调姿台4上表面还设有航天器支架5,所述航天器支架5包括水平部分和弧形部分,水平部分用于放置太阳帆板,弧形部分用于支撑和固定航天器舱段6,如图1所示;所述触地板上平台11和触地板下平台31之间的连接架102为镂空的;所述第二移动副p234连接的第二直杆件65与平行四边形放大机构50所在平面设有夹角α,0
°
≤α≤90
°
;3≤n≤6;本实施例中支链设有四条,即n=4,分别为第一支链2、第二支链3、第三支链7与第四支链8,相应的所述调姿台台板41的下表面上留有四个矩形布置的定位孔37。在本实施例中,单个触地板1上的驱动单元和执行单元形成了一个整体的
模块,该整体模块安装在调姿台台板下表面的定位孔处,使其方便安装与拆卸。
23.本实施例具体操作为:将航天器舱段6固定于航天器支架5的弧形部分内,根据需要,控制麦克纳姆轮驱动电机43和麦克纳姆轮减速器42驱动四个麦克纳姆轮10,将调姿台4移动到位,之后进行调姿台4的调姿,调姿的具体过程为:调姿台4下方四个触地板1起支撑作用,四个触地板1上安装有四个支链,所有支链为并联驱动机构,每个支链均有对应的平行四边形放大机构50,其为执行单元,通过各个铰接元件进行安装;在触地板1上平台设有驱动单元,包括第一移动副p133、第二移动副p234与第三移动副p335,触地板下台板31上设有第一球面副外球壳12,与平行四边形放大机构50通过支链第一连接杆32与第一球铰s140连接,当每个支链的第一移动副p133与第三移动副p335进行直线方向的移动时,第一直杆件62和第三直杆件68通过相应的球副驱动平行四边形机构第二连接杆52和平行四边形机构第三连接杆53移动或以平行四边形机构第三转动副r357(即u副u160)为轴转动;当第二移动副p234进行直线方向的运动时,第二直杆件65通过相应的球副驱动u副u160动作,整个平行四边形放大机构50以第一球铰s140为轴向外或向内翻动,这样就形成了高刚度全闭环链,使得单个支链调节了调姿台4对应处的姿态。当四个支链中每个支链对应的三个移动副(即12个移动副)均移动时,则可以实现调姿台六自由度的调整,也就可以实现航天器舱段的位姿调整,该冗余驱动方式提高了调姿平台的承载能力。
24.本发明要求保护的范围不限于以上具体实施方式,而且对于本领域技术人员而言,本发明可以有多种变形和更改,凡在本发明的构思与原则之内所作的任何修改、改进和等同替换都应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1