四足机器人的控制方法、装置、机器人及存储介质与流程
本申请实施例涉及机器人控制,特别涉及一种四足机器人的控制方法、装置、机器人及存储介质。
背景技术:
1、随着人工智能技术的发展,一些组织和科研机构相继推出了诸如双足机器人、四足机器人等多款能够实现自动行走的机器人。
2、以四足机器人为例,目前对于四足机器人的研究大多侧重于本体结构设计,对于其运动控制的研究相对较少,从而导致目前的四足机器人基本只具备在简单的环境中四足爬行的运动能力。
3、在较为复杂的环境中,四足机器人如何稳定运动,是当前亟待解决的重要技术问题。
技术实现思路
1、本申请提供了一种四足机器人的控制方法、装置、机器人及存储介质,能够实现四足机器人在复杂环境中的进行随机落脚运动。所述技术方案如下:
2、根据本申请的一方面,提供了一种四足机器人的控制方法,所述方法包括:
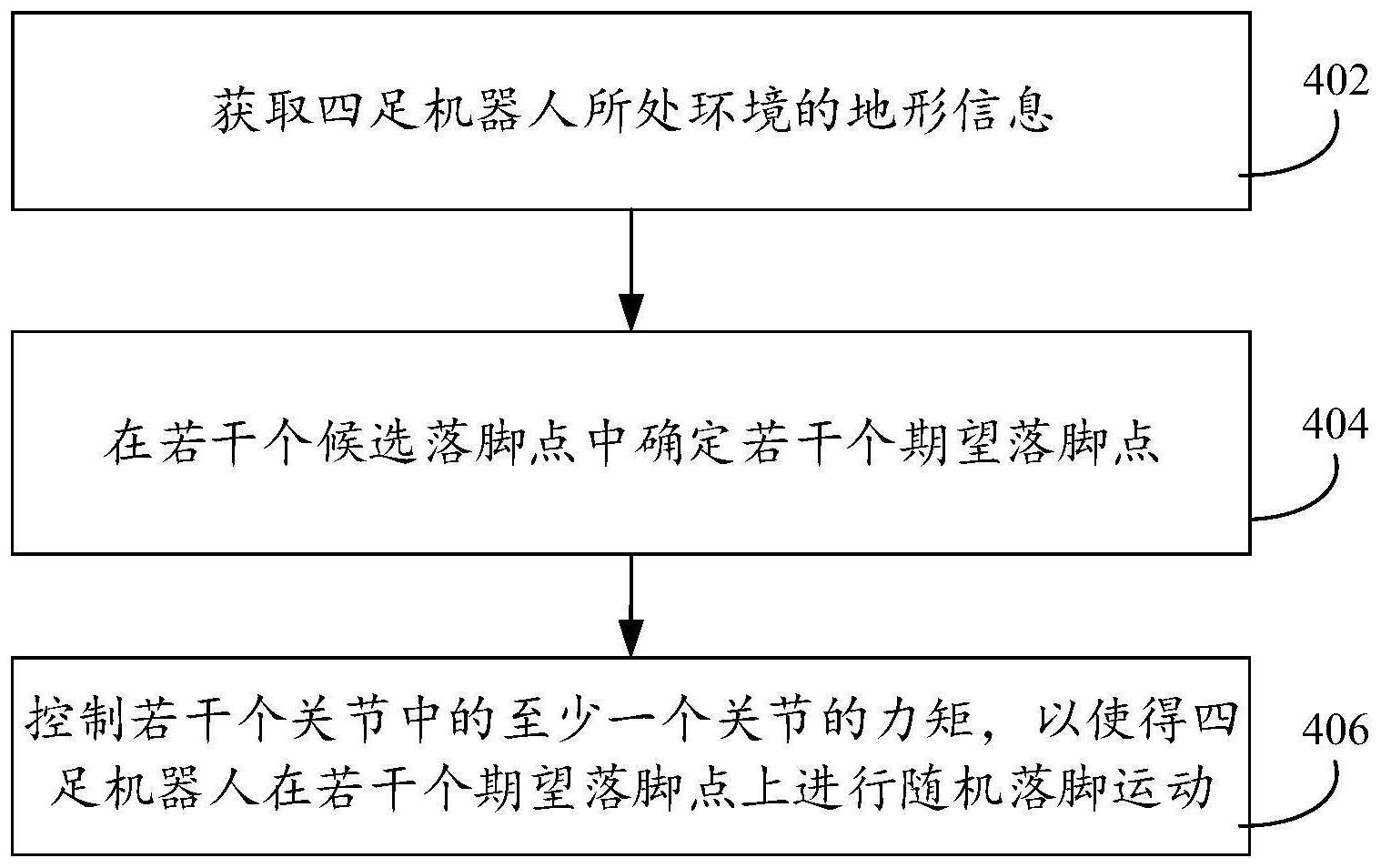
3、获取所述四足机器人所处环境的地形信息,所述地形信息包括若干个候选落脚点;
4、在所述若干个候选落脚点中确定若干个期望落脚点,所述期望落脚点是支撑所述四足机器人在所述环境中运动的落脚点;
5、控制所述若干个关节中的至少一个关节的力矩,以使得所述四足机器人在所述若干个期望落脚点上进行随机落脚运动,所述随机落脚运动中的所述期望落脚点具有随机性或无规律性。
6、根据本申请的一方面,提供了一种四足机器人的控制装置,所述装置包括:
7、获取模块,用于获取所述四足机器人所处环境的地形信息,所述地形信息包括若干个候选落脚点;
8、确定模块,用于在所述若干个候选落脚点中确定若干个期望落脚点,所述期望落脚点是支撑所述四足机器人在所述环境中运动的落脚点;
9、控制模块,用于控制所述若干个关节中的至少一个关节的力矩,以使得所述四足机器人在所述若干个期望落脚点上进行随机落脚运动,所述随机落脚运动中的所述期望落脚点具有随机性或无规律性。
10、根据本申请的另一方面,提供了一种四足机器人,所述四足机器人包括处理器和存储器,所述存储器中存储有至少一条指令,所述至少一条指令由所述处理器加载并执行以实现如上所述的四足机器人的控制方法。
11、根据本申请的另一方面,提供了一种计算机存储介质,计算机可读存储介质中存储有至少一条计算机程序,至少一条计算机程序由处理器加载并执行以实现如上方面所述的四足机器人的控制方法。
12、根据本申请的另一方面,提供了一种计算机程序产品,上述计算机程序产品包括计算机程序,所述计算机程序存储在计算机可读存储介质中;所述计算机程序由计算机设备的处理器从所述计算机可读存储介质读取并执行,使得所述计算机设备执行如上方面所述的四足机器人的控制方法。
13、根据本申请的另一方面,提供了一种芯片,所述芯片包括可编程逻辑电路或程序,安装有所述芯片的设备用于实现如上所述的四足机器人的控制方法。
14、本申请提供的技术方案带来的有益效果至少包括:
15、通过获取四足机器人所处环境的地形信息,在若干个候选落脚点中确定若干个支撑四足机器人在环境中运动的期望落脚点;控制若干个关节中的至少一个关节的力矩,以使得四足机器人在若干个期望落脚点上进行随机落脚运动。本申请基于四足机器人所处环境的地形信息,使得四足机器人能够在复杂环境下稳定的实现随机落脚运动,提升了四足机器人在复杂环境下运动的稳定性以及展示效果。
技术特征:
1.一种四足机器人的控制方法,其特征在于,所述四足机器人包括基座部、设置在所述基座部上的四个足部以及所述四个足部对应的若干个关节,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述控制所述若干个关节中的至少一个关节的力矩,以使得所述四足机器人在所述若干个期望落脚点上随机落脚运动,包括:
3.根据权利要求2所述的方法,其特征在于,所述基本运动方式包括如下运动方式中的至少一种:
4.根据权利要求2所述的方法,其特征在于,所述在所述若干个候选落脚点中确定若干个期望落脚点,包括:
5.根据权利要求4所述的方法,其特征在于,所述在所述若干个候选落脚点中选择与所述偏移落脚点最近的候选落脚点,确定为基于所述基本运动方式进行所述随机落脚运动时的所述期望落脚点,包括:
6.根据权利要求4所述的方法,其特征在于,所述将所述轨迹落脚点按照偏移量进行偏移,得到偏移落脚点,包括:
7.根据权利要求4所述的方法,其特征在于,所述将所述轨迹落脚点按照偏移量进行偏移,得到偏移落脚点,包括:
8.根据权利要求4所述的方法,其特征在于,所述将所述轨迹落脚点按照偏移量进行偏移,得到偏移落脚点,包括:
9.根据权利要求4至8任一所述的方法,其特征在于,所述方法还包括:
10.根据权利要求4至8任一所述的方法,其特征在于,所述方法还包括:
11.根据权利要求10所述的方法,其特征在于,所述述在所述若干个候选落脚点中确定若干个期望落脚点,包括:
12.根据权利要求11所述的方法,其特征在于,所述在所述若干个候选落脚点中选择与所述轨迹落脚点最近的候选落脚点,确定为基于所述基本运动方式进行运动时的所述期望落脚点,包括:
13.根据权利要求1至4任一所述的方法,其特征在于,所述获取所述四足机器人所处环境的地形信息,包括:
14.一种四足机器人的控制装置,其特征在于,所述装置包括:
15.一种四足机器人,其特征在于,所述四足机器人包括处理器和存储器,所述存储器中存储有至少一条指令,所述至少一条指令由所述处理器加载并执行以实现如权利要求1至13任一项所述的四足机器人的控制方法。
16.一种计算机存储介质,其特征在于,所述计算机可读存储介质中存储有至少一条计算机程序,至少一条计算机程序由处理器加载并执行以实现如权利要求1至13中任一项所述的四足机器人的控制方法。
17.一种计算机程序产品,其特征在于,所述计算机程序产品包括计算机程序,所述计算机程序存储在计算机可读存储介质中;所述计算机程序由计算机设备的处理器从所述计算机可读存储介质读取并执行,使得所述计算机设备执行如权利要求1至13中任一项所述的四足机器人的控制方法。
18.一种芯片,其特征在于,所述芯片包括可编程逻辑电路或程序,安装有所述芯片的设备用于实现如权利要求1至13任一所述的四足机器人的控制方法。
技术总结
本申请公开了一种四足机器人的控制方法、装置、机器人及存储介质,属于机器人控制领域。所述方法包括:获取所述四足机器人所处环境的地形信息,所述地形信息包括若干个候选落脚点;在所述若干个候选落脚点中确定若干个期望落脚点,所述期望落脚点是支撑所述四足机器人在所述环境中运动的落脚点;控制所述若干个关节中的至少一个关节的力矩,以使得所述四足机器人在所述若干个期望落脚点上进行随机落脚运动,所述随机落脚运动中的所述期望落脚点具有随机性或无规律性。本申请能够使得四足机器人能够在复杂环境下稳定的实现随机落脚运动,提升了四足机器人在复杂环境下运动时的稳定性以及展示效果。
技术研发人员:姜鑫洋,郑宇,迟万超,王帅,张晟浩,王海涛
受保护的技术使用者:腾讯科技(深圳)有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!