控制足式机器人的方法和装置及足式机器人与流程
本申请涉及足式机器人,具体涉及足式机器人规划控制,尤其涉及一种控制足式机器人的方法、装置、一种足式机器人,一种控制足式机器人的设备、以及一种非易失性计算机可读存储介质。
背景技术:
1、随着人工智能及足式机器人技术在民用和商用领域的广泛应用,基于人工智能及足式机器人技术的足式机器人在智能交通、智能家居等领域起到日益重要的作用,也面临着更高的要求。
2、目前,足式机器人(如四足足式机器人)已经能够执行多种不同的动作,例如,跳跃、空翻等。执行这些动作的足式机器人在落地过程中,往往因为缺乏有效的控制方案,导致足式机器人在落地过程中动作僵硬,各个关节受到过大的冲击力,机身回弹较大。甚至由于落地时受到的冲击力过大,导致足式机器人损坏。
3、尤其是执行空翻动作的足式机器人,由于足式机器人在与平面接触的时刻,机身可能具有一个较大的倾斜角,前腿和后腿接触平面的时刻往往存在一定的差异,更容易侧翻。相比于执行自由落地动作的足式机器人,执行空翻动作的足式机器人更需要有效的控制方案来保证足式机器人在落地过程中的稳定。
4、基于此,如何在执行空翻动作的足式机器人的落地过程中,如何对足式机器人进行进一步控制成为了研究热点。
技术实现思路
1、针对以上问题,本公开提供了一种控制足式机器人的方法、装置、一种足式机器人,一种控制足式机器人的设备、以及一种非易失性计算机可读存储介质。
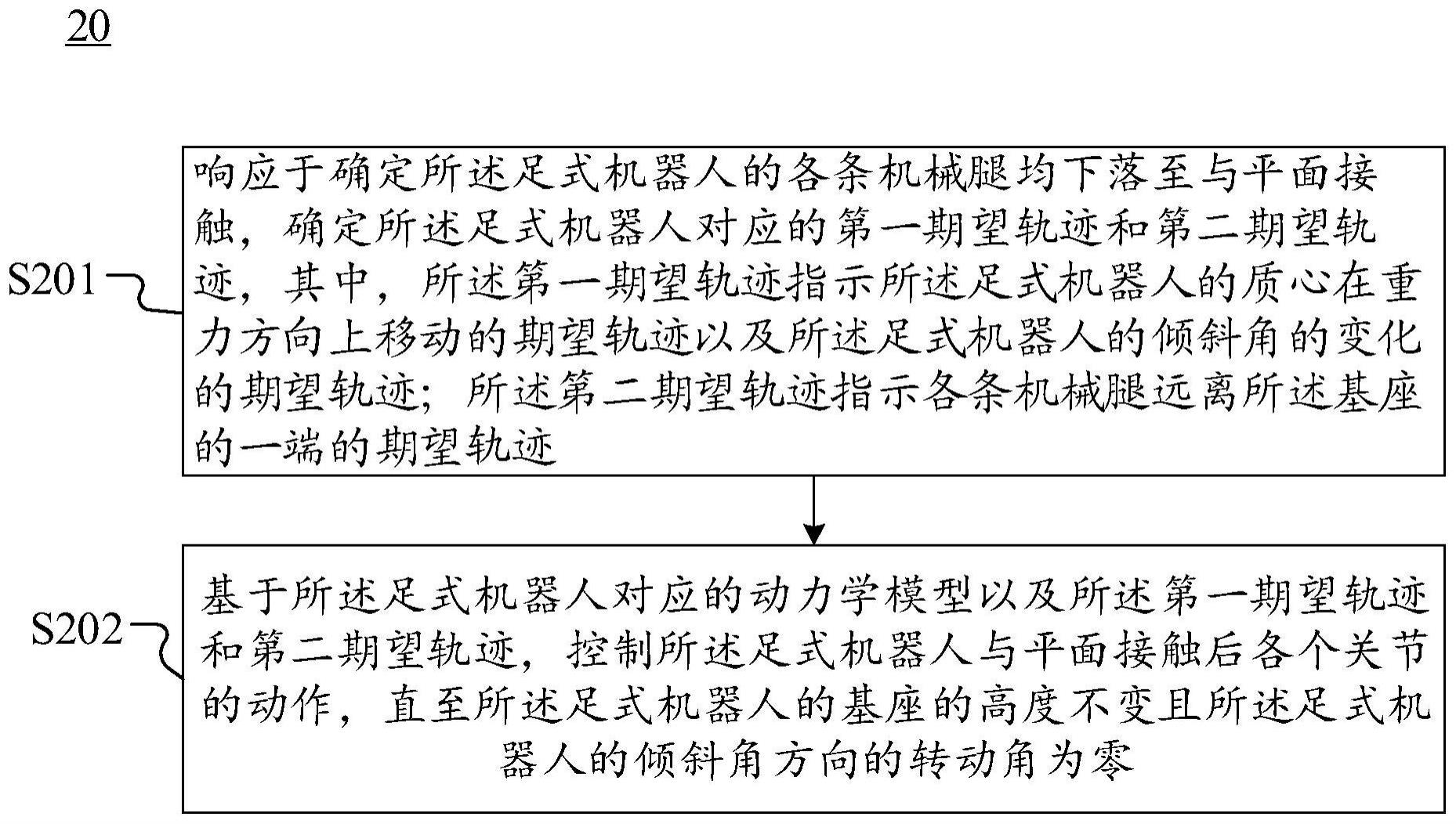
2、根据本公开的一方面,提出了一种控制足式机器人的方法,所述足式机器人包括基座和至少两条机械腿,所述每条机械腿包括至少一个关节,所述方法包括:响应于确定所述足式机器人的各条机械腿均下落至与平面接触,确定所述足式机器人对应的第一期望轨迹和第二期望轨迹,其中,所述第一期望轨迹指示所述足式机器人的质心在重力方向上移动的期望轨迹以及所述足式机器人的倾斜角的变化的期望轨迹;所述第二期望轨迹指示各条机械腿远离所述基座的一端的期望轨迹;基于所述足式机器人对应的动力学模型以及所述第一期望轨迹和第二期望轨迹,控制所述足式机器人与平面接触后各个关节的动作,直至所述足式机器人的基座的高度不变且所述足式机器人的倾斜角方向的转动角为零。
3、根据本公开的另一方面,提出了一种控制足式机器人的装置,所述足式机器人包括基座和至少两条机械腿,所述每条机械腿包括至少一个关节,所述装置包括:规划计算设备,被配置为响应于确定所述足式机器人的各条机械腿均下落至与平面接触,确定所述足式机器人对应的第一期望轨迹和第二期望轨迹,其中,所述第一期望轨迹指示所述足式机器人的质心在重力方向上移动的期望轨迹以及所述足式机器人的倾斜角的变化的期望轨迹;所述第二期望轨迹指示各条机械腿远离所述基座的一端的期望轨迹;控制电机,被配置为基于所述足式机器人的质心对应的动力学模型以及所述第一期望轨迹和第二期望轨迹,控制所述足式机器人与平面接触后各个关节的动作,直至所述足式机器人的基座的高度不变且所述足式机器人的倾斜角方向的转动角为零。
4、根据本公开的另一方面,提出了一种足式机器人,包括:基座部;下肢部,其连接至所述基座部,所述下肢部包括四条下肢,其中每条下肢包括髋关节两个自由度和膝关节1个自由度;控制器,所述控制器设置在所述足式机器人上,且能够执行上述的方法。
5、根据本公开的另一方面,提出了一种控制足式机器人的设备,包括:处理器;和存储器,其中,所述存储器中存储有计算机可执行代码,所述计算机可执行代码当由所述处理器运行时,执行上述的方法。
6、根据本公开的另一方面,提出了一种非易失性计算机可读存储介质,其上存储有可执行代码,所述可执行代码在被处理器执行时,使得所述处理器执行上述方法。
7、本公开的实施例对自由落体运动下的足式机器人的建立了模型,并基于该模型,对足式机器人落地后的质心运动轨迹和足端位置轨迹进行了规划,并基于规划的质心运动轨迹和足端位置轨迹,求解各个电机的控制力矩,对足式机器人进行控制。从而,保证了足式机器人在落地过程中,各个关节仅受到较小的冲击力,机身回弹较小,倾斜角变化较小,在保证落地功能的同时对足式机器人形成了良好的抗冲击保护效果。
技术特征:
1.一种控制足式机器人的方法,所述足式机器人包括基座和至少两条机械腿,每条机械腿包括至少一个关节,所述方法包括:
2.如权利要求1所述的方法,其中,所述至少两条机械腿包括至少一条前腿和至少一条后腿,所述响应于确定所述足式机器人下落至与平面接触,确定所述足式机器人对应的第一期望轨迹和第二期望轨迹包括:
3.如权利要求2所述的方法,其中,所述第一期望轨迹使得以下各项的组合达到极值:所述足式机器人的质心波动量、所述足式机器人受到的冲击力总量、所述足式机器人的下蹲量、所述足式机器人受到的冲击力突变量。
4.如权利要求3所述的方法,其中,所述第一期望轨迹满足以下各项约束条件:
5.如权利要求1所述的方法,其中,所述响应于确定所述足式机器人的各条机械腿均下落至与平面接触,确定所述足式机器人对应的第一期望轨迹和第二期望轨迹包括:
6.如权利要求1所述的方法,其中,所述控制所述足式机器人与平面接触后各个关节的动作包括:
7.如权利要求1所述的方法,其中,所述第一期望轨迹指示:在所述足式机器人的各条机械腿与平面接触后,所述足式机器人的质心在重力方向上的高度逐渐降低然后逐渐上升,并且所述足式机器人的倾斜角的角度值逐渐增加后逐渐降低。
8.如权利要求2所述的方法,其中,所述动力学模型至少部分地基于所述近似模型,并且所述动力学模型指示所述单刚体的加速度与第一推力、第二推力和重力之间的关系,并且所述动力学模型还指示所述单刚体的角加速度与第一推力和第二推力之间的关系。
9.如权利要求2所述的方法,其中,所述基于所述足式机器人对应的动力学模型以及所述第一期望轨迹和第二期望轨迹,控制所述足式机器人与平面接触后各个关节的动作包括:
10.如权利要求9所述的方法,其中,所述基于所述足式机器人对应的动力学模型以及所述第一期望轨迹和第二期望轨迹,控制所述足式机器人与平面接触后各个关节的动作包括:
11.如权利要求1所述的方法,其中,所述基于所述足式机器人对应的动力学模型以及所述第一期望轨迹和第二期望轨迹,控制所述足式机器人与平面接触后各个关节的动作包括:
12.如权利要求1所述的方法,其中,所述确定足式机器人的各条机械腿均下落至与平面接触包括:
13.如权利要求1所述的方法,其中,所述基于所述足式机器人对应的动力学模型以及所述第一期望轨迹和第二期望轨迹,控制所述足式机器人与平面接触后各个关节的动作包括:
14.如权利要求12-13中的任一项所述的方法,其中,所述当前状态信息包括以下各项中的至少一项:
15.一种控制足式机器人的装置,所述足式机器人包括基座和至少两条机械腿,每条机械腿包括至少一个关节,所述装置包括:
16.一种足式机器人,包括:
17.一种控制足式机器人的设备,包括:
18.一种非易失性计算机可读存储介质,其上存储有可执行代码,所述可执行代码在被处理器执行时,使得所述处理器执行权利要求1-14中任一所述的方法。
技术总结
本公开的实施例提供一种控制足式机器人的方法、装置、一种足式机器人,一种控制足式机器人的设备、以及一种非易失性计算机可读存储介质。足式机器人包括基座和至少两条机械腿,每条机械腿包括至少一个关节,该方法包括:响应于确定所述足式机器人的各条机械腿均下落至与平面接触,确定所述足式机器人对应的第一期望轨迹和第二期望轨迹,其中,所述第一期望轨迹指示所述足式机器人的质心在重力方向上移动的期望轨迹以及所述足式机器人的倾斜角的变化的期望轨迹;所述第二期望轨迹指示各条机械腿远离所述基座的一端的期望轨迹;基于所述足式机器人对应的动力学模型以及所述第一期望轨迹和第二期望轨迹,控制所述足式机器人与平面接触后各个关节的动作。
技术研发人员:王帅,郑宇,周钦钦,迟万超
受保护的技术使用者:腾讯科技(深圳)有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!