一种语音控制可对话助老送药机器人
1.本发明涉及智能助老机器人领域,尤其是涉及一种语音控制可对话助老送药机器人。
背景技术:
2.21世纪以来,随着我国经济高速发展,医疗技术不断进步,国人的生育观念也随之发生了变化,出生率逐年降低以及老龄人口不断增加,使得随之而来的人口老龄化问题也在不断出现在大众的视野当中;人口老龄化程度加重,青年劳动力比重下降,这已成为阻碍我国经济发展迈向新台阶的重要因素之一。据联合国人口调查报告显示,中国将在2024年至2026年之间进入人口老龄化时期。到2050年,我国老年人口数量将超3.5亿,约占总人口的293%。预计到2100年,我国老年人口数量将超过4亿。然而,目前养老机构并没有得到普及与完善,因此居家养老将成为一个重要趋势,而且居家养老通常以独居形式,独居老人的安全问题俨然成为一个当下令人忧虑的问题。因此,如何保障独居老人的安全,给足老人独自居住的安全感,现已成为一个民生热点问题。
3.然而,目前家庭看护机构并没有得到普及与完善,居家看护将成为一个热点领域,家中的安全问题俨然成为一个当下令人忧虑的问题。因此,如何保障居家看护的功能性、安全性,现已成为一个民生热点问题。基于这种背景下,制作语音控制可对话助老送药机器人具有很好的应用价值和意义。
技术实现要素:
4.为了克服现有技术存在的缺陷,本发明提供了一种语音控制可对话助老送药机器人,能够实现高效、精准、稳定的药品抓取的功能。
5.本发明解决其技术问题所采用的技术方案是:
6.一种语音控制可对话助老送药机器人,包括行走机构、语音对话系统、循迹避障系统、用于抓取药品的抓取机构、识别系统、用于判断、调整机器人的姿态的惯导传感器和控制系统,所述行走机构、语音对话系统、循迹避障系统、抓取机构、识别系统和惯导传感器均与控制系统连接,所述控制系统与手机app连接,所述行走机构包括底盘、四个车轮和四个带编码器的直流电机,四个车轮安装在底盘的四个角处,每个直流电机分别通过电机座安装在底盘底部上,并且其电机轴与相应的车轮连接;
7.所述抓取机构包括机械臂和机械爪,所述机械臂通过支撑板安装在底盘上,所述机械爪包括抓取部分和机械爪步进电机,所述抓取部分包括机械爪底座、四个爪子和机械爪传动件,四个爪子均布在机械爪传动件外周,并且其安装在机械爪底座的底部,所述机械爪步进电机安装在机械爪传动件上,并且机械爪步进电机的电机轴与导杆的下端同轴连接,导杆的上端与螺母配合连接,螺母安装在机械爪底座上,螺母与导杆形成丝杆螺母机构,机械爪步进电机带动导杆转动,通过相对运动带动四个爪子的开合;所述识别系统包括用于识别药品的智能摄像头和用于读取、记录及匹配药品所带的条形码的条码扫描模块,
所述智能摄像头安装在机械爪底座上,所述条码扫描模块安装在底盘的后部上。
8.进一步,每个爪子均包括固定部、四根连接杆和爪部,所述固定部与爪部均为三角形,固定部的上端角安装在机械爪底座上,四根连接杆两两一组,两组连接杆平行布置,两组连接杆的上端分别与固定部的下端两角铰接,两组连接杆的下端分别与爪部的上端两角铰接,位于内侧的一组连接杆的下端还通过连接件与机械爪传动件连接。
9.再进一步,所述机械臂包括一级臂、二级臂、第一连杆、三角形连接件、第二连杆、第三连杆、一级臂步进电机和二级臂步进电机,所述一级臂的下端通过转轴可转动地安装在u型支架上,所述u型支架安装在底盘的后部中间处,所述一级臂的上端与二级臂的中后部铰接,所述二级臂的前端与机械爪底座铰接,二级臂步进电机和一级臂步进电机分别安装在u型支架的左右两侧;
10.所述第一连杆、第二连杆和第三连杆均为双关节轴承连杆,所述第一连杆的下端关节铰接在u型支架上,所述三角形连接件的中间角与一级臂的上端可转动连接,所述第一连杆的上端关节与三角形连接件的上端角铰接,所述第二连杆的后端关节与三角形连接件的下端角铰接,所述第二连杆的前端关节与机械爪底座铰接,所述转轴上还设有第一从动带轮,第一从动带轮通过第一同步带与一级臂步进电机的电机轴上的第一主动带轮连接;
11.所述第三连杆的上端关节与二级臂的后端铰接,所述第三连杆的下端关节与传动连接件的一端铰接,传动连接件的另一端上设有第二从动带轮,第二从动带轮可转动地安装在转轴上,并且其通过第二同步带与二级臂步进电机的电机轴上的第二主动带轮连接。
12.再进一步,所述语音对话系统包括语音识别模块和串口喇叭,所述语音识别模块通过串口线与串口喇叭连接,所述语音识别模块安装在底盘的前部上,串口喇叭安装在支撑板上。
13.再进一步,所述循迹避障系统包括两个用于避障的光电传感器、一个用于避障的七路灰度传感器和一个用于循迹的六路灰度传感器,两个光电传感器分别通过光电传感器支架安装在底盘的前部上,用于避障的七路灰度传感器安装在底盘底部的左右一侧上,用于循迹的六路灰度传感器安装在底盘底部的前侧上,每个灰度传感器上均套有用于防干扰的遮光罩。
14.更进一步,所述控制系统包括单片机、直流电机驱动器、步进电机驱动器、无线通信模块、蓝牙模块和用于供电的电源,所述单片机分别与直流电机驱动器和步进电机驱动器连接,所述直流电机驱动器与所有直流电机连接,所述步进电机驱动器与所有步进电机连接,所述惯导传感器、无线通信模块、蓝牙模块与单片机集成于同一个电路板上,所述识别系统通过无线通信模块与单片机连接,手机app通过无线通信模块或蓝牙模块与单片机连接;
15.所述单片机通过控制开关与电源连接,所述机械爪底座上还设有轻触开关,所述惯导传感器和轻触开关均与单片机连接。
16.本发明的有益效果主要表现在:能够实现高效、精准、稳定的药品抓取的功能,且集成了语音控制、人机交互、智能循迹、自动避障、自动分拣以及老人健康监测等功能,大大提高了该机器人的效率、功能性以及智能化。
附图说明
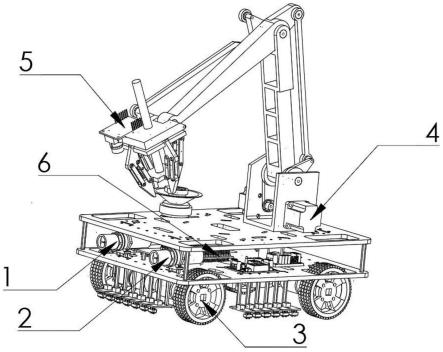
17.图1为本发明的整体结构示意图。
18.图2为本发明的另一个角度的结构示意图。
19.图3为本发明的仰视角度的结构示意图。
20.图4为抓取机构的整体结构示意图。
21.图5为抓取机构的另一个角度的结构示意图。
22.图6为机械爪的整体结构示意图。
23.图7为集成电路板的主视图。
24.图8为机械爪步进电机的结构示意图。
25.图9为同步带的结构示意图。
具体实施方式
26.下面结合附图对本发明作进一步描述。
27.参照图1~图9,一种语音控制可对话助老送药机器人,包括行走机构、语音对话系统、循迹避障系统、用于抓取药品的抓取机构、识别系统、用于判断、调整机器人的姿态的惯导传感器32和控制系统6,所述行走机构、语音对话系统、循迹避障系统、抓取机构、识别系统和惯导传感器32均与控制系统6连接,所述控制系统6与手机app连接,所述行走机构包括底盘、四个车轮和四个带编码器的直流电机9,四个车轮安装在底盘的四个角处,每个直流电机分别通过电机座安装在底盘底部上,并且其电机轴与相应的车轮连接;
28.所述抓取机构包括机械臂和机械爪16,所述机械臂通过支撑板安装在底盘上,所述机械爪包括抓取部分和机械爪步进电机34,所述抓取部分包括机械爪底座15、四个爪子和机械爪传动件27,四个爪子均布在机械爪传动件27外周,并且其安装在机械爪底座15的底部,所述机械爪步进电机34安装在机械爪传动件27上,并且机械爪步进电机34的电机轴与导杆28的下端同轴连接,导杆28的上端与螺母配合连接,螺母安装在机械爪底座15上,螺母与导杆28形成丝杆螺母机构,机械爪步进电机34带动导杆28转动,通过相对运动带动四个爪子的开合;所述识别系统包括用于识别药品的智能摄像头5和用于读取、记录及匹配药品所带的条形码的条码扫描模块14,所述智能摄像头5安装在机械爪底座15上,所述条码扫描模块14安装在底盘的后部上。
29.进一步,每个爪子均包括固定部、四根连接杆29和爪部25,所述固定部与爪部25均为三角形,固定部的上端角安装在机械爪底座15上,四根连接杆29两两一组,两组连接杆平行布置,两组连接杆的上端分别与固定部的下端两角铰接,两组连接杆的下端分别与爪部25的上端两角铰接,位于内侧的一组连接杆的下端还通过连接件与机械爪传动件27连接。
30.再进一步,所述机械臂包括一级臂24、二级臂18、第一连杆23、三角形连接件22、第二连杆21、第三连杆、一级臂步进电机和二级臂步进电机4,所述一级臂24的下端通过转轴可转动地安装在u型支架上,所述u型支架安装在底盘的后部中间处,所述一级臂24的上端与二级臂18的中后部铰接,所述二级臂18的前端与机械爪底座15铰接,二级臂步进电机4和一级臂步进电机分别安装在u型支架的左右两侧;
31.所述第一连杆23、第二连杆21和第三连杆均为双关节轴承连杆,所述第一连杆23的下端关节铰接在u型支架上,所述三角形连接件22的中间角与一级臂24的上端可转动连
接,所述第一连杆23的上端关节与三角形连接件22的上端角铰接,所述第二连杆21的后端关节与三角形连接件22的下端角铰接,所述第二连杆21的前端关节与机械爪底座15铰接,所述转轴上还设有第一从动带轮,第一从动带轮通过第一同步带与一级臂步进电机的电机轴上的第一主动带轮连接;
32.所述第三连杆的上端关节与二级臂的后端铰接,所述第三连杆的下端关节与传动连接件的一端铰接,传动连接件的另一端上设有第二从动带轮17,第二从动带轮17可转动地安装在转轴上,并且其通过第二同步带19与二级臂步进电机的电机轴20上的第二主动带轮连接。
33.再进一步,所述语音对话系统包括语音识别模块12和串口喇叭13,所述语音识别模块12通过串口线与串口喇叭13连接,所述语音识别模块12安装在底盘的前部上,串口喇叭13安装在支撑板上。
34.再进一步,所述循迹避障系统包括两个用于避障的光电传感器1、2、一个用于避障的七路灰度传感器7和一个用于循迹的六路灰度传感器10,两个光电传感器1、2分别通过光电传感器支架安装在底盘的前部上,用于避障的七路灰度传感器7安装在底盘底部的左右一侧上,用于循迹的六路灰度传感器10安装在底盘底部的前侧上,每个灰度传感器上均套有用于防干扰的遮光罩。
35.更进一步,所述控制系统包括单片机31、直流电机驱动器8、步进电机驱动器、无线通信模块33、蓝牙模块30和用于供电的电源,所述单片机分别与直流电机驱动器8和步进电机驱动器连接,所述直流电机驱动器8与所有直流电机连接,所述步进电机驱动器与所有步进电机连接,所述惯导传感器32、无线通信模块33、蓝牙模块30与单片机31集成于同一个电路板上,所述识别系统通过无线通信模块33与单片机31连接,手机app通过无线通信模块33或蓝牙模块30与单片机31连接;
36.所述单片机31通过控制开关与电源连接,所述机械爪底座15上还设有轻触开关,所述惯导传感器32和轻触开关均与单片机31连接。
37.图1至图6中的机械爪步进电机省略画法。
38.如图1所示,四个车轮以及四个带编码器的直流电机9构成动力系统11,车轮为防滑轮3,四个防滑轮分别安装在相应的直流电机的输出轴上,硬件上能够提供稳定的动力、实现灵活转向。每个直流电机9由直流电机驱动器8进行驱动,直流电机驱动器8采用60a双路驱动,最大电流可达60a,性能稳定。
39.智能摄像头5采用openmv智能摄像头,是一款成本低,可扩展,支持python的机器视觉模块,可有效处理图像,分析药品外形的颜色与形状,作为抓取前的第一次识别;条码扫描模块14安装在机器人底盘的后部上,可以有效读取、记录药品所带的条形码,并进行匹配,大大提高了抓取的稳定性、准确性。
40.如图2所示,条码扫描模块14采用gm65条形码二维码扫描识别模块,语音识别模块12包括ld3320语音识别芯片和继电器拓展板,可以监测使用者的声音、发出的指令,使喇叭根据使用者命令的不同,做出不同的回应。
41.所述语音对话系统作为机器人的主要部件,对于部分腿脚不灵,对智能设备不够熟悉的人来说,可以极大的满足他们的需求;同时,目前来说,市面上采取该控制方式的机器人类别较少,极具创新性;另外,ld3320语音识别芯片配合继电器拓展板,串口与继电器
配合给出控制信号,利用继电器本身“以小电流控制大电流”的特性,向外输出高低电平作为语音识别模块状态的反馈,为机器人提供了更大的拓展空间。
42.如图3所示,所述遮光罩套在六路灰度传感器上,防止外部光线干扰;所述光电传感器1、2安装在机器人底盘的前方上部,通过光电支架固定,以免发生误判,光电传感器1、2可以有效识别路径障碍物以及人体,可以避开障碍物或者使用者继续前进。循迹避障系统利用光电传感器1、2进行水平方向上障碍的监测,并辅助以灰度传感器,利用灰度传感器经过竖直距离上的位移变化后,出现的电平翻转现象,来弥补部分情况下,光电传感器无法检测到高度较低的障碍的缺点,容错高、识别能力强,并以此为依据,指导机器人进行循迹避障动作。
43.机器人的供电系统以及直电机驱动器8都放置在机器人底盘的下方,这种摆放方式可以尽可能简化动力系统11、控制系统6以及抓取机构之间的走线,提高机器人运作的稳定性。
44.如图4和图5所示,需要抓取药品时,二级臂步进电机4正转,通过第二主动带轮、第二同步带19、第二从动带轮17带动传动连接件向后摆动,从而带动第三连杆向下运动,二级臂18的前端及机械爪16向上抬升;接着一级臂步进电机正转,通过第一主动带轮、第一同步带、第一从动带轮带动一级臂24向前摆动,与此同时,三角形连接件22进行转动,第一连杆23与第二连杆21之间展开,二级臂18向前联动;
45.抓取药品完毕时,一级臂步进电机反转带动一级臂24向后摆动,与此同时,三角形连接件22进行转动,第一连杆23、第二连杆21复位,二级臂18向后联动;接着二级臂步进电机4反转,带动第三连杆向上运动,二级臂18的前端及机械爪16向下运动。
46.同步带35使用磨砂材质,保证了摩擦力,确保传动距离的完整;一级臂24保证了机械臂工作寿命与稳定性的同时,提高了机械臂整体的负载能力,使机械臂在抓取药品时不会出现因为负载能力差导致的抖动、不稳定的现象;另外,一级臂24中间做镂空处理,减轻了机械臂的重量;一级臂24可以通过3d打印制作。机械臂的长度可以调整,运输效率高,能够大大提高搬运效率,以适应不同的应用场景。
47.抓取部分采用柔性材料制作,配合机械爪步进电机34实现抓取功能,以达到机械臂动作迅速、稳定的抓取药品。
48.如图6所示,机械爪底座15的中部设有通孔26,通孔26处安装有螺母,导杆28与螺母配合连接,以机械爪步进电机34正向旋转为例,机械爪步进电机34正向旋转时,带动一根导杆28同时转动,导杆28同时带动四个爪子运动,爪部完成抓取动作;
49.所述抓取机构考虑到抓取药品形状不固定,运动空间较为局限、需要机械臂具有更高的灵活性、自由度的问题,抓取机构的运动控制全部由步进电机来完成,具有精度高,噪音小的优点;螺母与导杆形成上下移动副,机械爪步进电机转动带动导杆的上下移动从而实现四个爪子的同步运动,具有同步性好,便于药品装卸的优点;另外,该机械爪16顶部还设置了轻触开关,一旦抓取机构发生故障、用力过大,该轻触开关会强制张开抓取部分,防止药品损坏。
50.如图7所示,单片机58的型号为stm32f103zet6,无线通信模块60采用esp8266无线通信模块,蓝牙模块57采用hc-08蓝牙串口模块;惯导传感器59采用mpu6050陀螺仪,主要起到判别方向,调节机器人自身位置的作用。采用esp8266无线通信模块与hc-08蓝牙串口模
块,来实现双环节的通信,并通过无线通信模块将药品的数据传输到单片机与手机app,实现老人健康状态的实时监测。即可以与手机app完成实时交互,增加了机器人与使用者之间的交互方式,便于老人亲属实时监测老人的健康情况,同时也可以完成机器人的远程操控,增强了机器人在家居环境中的实用性。esp8266无线通信模块与hc-08蓝牙串口模块组成的通信系统,安装在机器人底盘的前部上。通信系统与单片机集成在同一电路板上,大大减少了机器人的线路的复杂程度,提高了机器人工作时的稳定性。
51.供电电源采用两个12v电源,分别为动力系统的四个直流电机和其他系统提供电力,以及6v和5v稳压模块,变压模块采用dcdc ltc3780自动升降压稳压恒压恒流电源模块。所述电源固定在底盘中间下侧,与集成电路板相连,通过电路板为各元件供电。稳压模块、变压模块均与电路板相连,达到与电源并连实现变压稳压的效果。
52.本发明的工作原理如下:
53.第一步:药品录入
54.将需要录入药品首先放置机器人机械爪顶部的智能摄像头5前方,智能摄像头对药品进行多角度的抓拍,使用模板匹配来记录药品的大致形状,在智能摄像头5学习完毕之后会自动发出提示音;提示音收到后,再将药品上的条形码对准条码扫描模块14,条码扫描模块14将药品条码中的数据存储下来,并通过无线通信模块发送至手机app;使用者可以通过手机app来制定用药的时间、次数、药量。
55.第二步:抓取复位
56.机械臂的一级臂和二级臂回归初始位置,根据所抓药品形状及质量特点,调节机械爪16的抓取部分的开度、闭合力度和爪部角度,使抓取部分与药品的接触紧密。
57.第三步:启动控制并等待指令
58.打开控制开关,机器人的单片机31自动上电开始工作,系统开始运行,等待指令。接受到语音或者手机app发出的指令后,语音识别模块12检测到之后发出信号到单片机31,机器人的控制系统6将驱动四个直流电机9运行。
59.第四步:自动循迹避障
60.机器人的循迹避障系统为闭环控制,底盘左侧六路灰度传感器10反馈高低电平信号,作为底盘处是否遇到障碍物的判断,机器人底盘上的两个光电传感用于测量较高位置的障碍物,底盘前部的七路灰度传感器7用于循迹;单片机31根据灰度传感器和光电传感器1、2不同的反馈信号,控制机器人自主进行底盘的调整、避障的动作,以确保机器人的平稳运行,到达药品存放地点。
61.第五步:药品定位
62.首先由机器人上的惯导传感器32反馈信号,监测机器人的姿态是否正对于药品,在检测无误之后通过底盘前部的光电传感器进行细微调整,完成定位;
63.随之第三连杆进行第一个动作,二级臂步进电机4的电机轴20通过同步带轮、同步带将该旋转传递至第三连杆上,使得第三连杆向下运动,二级臂18的前端及机械爪向上抬升;接着一级臂步进电机旋转进行第二个动作,带动一级臂24向前摆动,与此同时,三角形连接件22进行转动,第一连杆23与第二连杆21之间展开,二级臂18向前联动;直至机械爪16末端略高于需要抓取的药品;
64.在机械爪16的高度确认了以后,位于机械爪16顶部的智能摄像头将会进行模板匹
配,找到需要抓取的药品,随之机械臂进行第三个动作,即水平方向上再次调节机械爪16的位置,控制一级臂步进电机和二级臂步进电机4此时同时工作,以二级臂步进电机4与一级臂步进电机以1:5的接收的脉冲数量比例进行反向的运动,保证机械爪16此时的水平移动,直至机械爪16的中心竖直方向上正对于药品的中心;
65.第六步:抓取
66.在抓取位置确定后,二级臂步进电机4单独运动,机械爪16竖直下降至包裹住药品,随后机械爪步进电机34运动,带动四个爪子至抓紧药品;
67.第七步:识别确认
68.抓取结束后,由单片机31发出信号,机械爪16将药品抓取至底盘后方的条码扫描模块14处,通过比对条形码是否相符进行识别确认;若确认无误后,将药品放置在支撑板上,并且通过机械爪16与支撑板固定住药品;
69.第八步:自动循迹避障
70.循迹避障的原理与第四步相同,行走路线为其逆运行。
71.第九步:交送药品并进行语音提醒
72.机器人将药品送达老人处后,控制系统6发出信号,机械臂将药品抬至指定高度,语音对话系统放出第一步在手机app中设定的药品的用量、用药时间以及药品余量,至老人将药品服下,将药品送回,送回步骤与机器人工作的第四步、第五步、第七步相同;
73.第十步:返回初始位置
74.机器人在送药任务完毕后,再次借助灰度传感器、光电传感器1、2进行循迹避障,自动返回其自身的出发点,进入待机模式,此时如果需要继续工作,可以通过语音识别模块12或者手机app远程遥控将其唤醒。
75.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1