一种基于轨道巡检机器人快速行走的速度控制系统的制作方法
1.本发明属于轨道巡检机器人领域,涉及速度控制技术,具体是一种基于轨道巡检机器人快速行走的速度控制系统。
背景技术:
2.轨道巡检机器人应用于固定的场景,每天重复循环特定的巡检任务,但轨道巡检机器人的轨道并非固定的直轨,而是直轨与弯轨交替出现。轨道巡检机器人在执行巡检任务时,遇到弯轨时的速度需要改变,否则会出现滑轨现象,导致设备运行出现故障。
3.为此,提出一种基于轨道巡检机器人快速行走的速度控制系统。
技术实现要素:
4.本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出一种基于轨道巡检机器人快速行走的速度控制系统,该一种基于轨道巡检机器人快速行走的速度控制系统解决了轨道巡检机器人在执行巡检任务时,遇到弯轨时的速度需要改变,否则会出现滑轨现象,导致设备运行出现故障的问题。
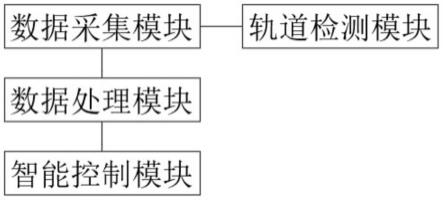
5.为实现上述目的,根据本发明的第一方面的实施例提出一种基于轨道巡检机器人快速行走的速度控制系统,包括数据采集模块、数据处理模块以及智能控制模块;各个模块之间基于数字信号的方式进行信息交互;
6.所述数据采集模块用于采集压力值和速度值;
7.并将所述压力值和所述速度值发送至所述数据处理模块;
8.所述数据处理模块用于接收所述压力值,根据所述压力值获取轨道巡检机器人的运行状态;
9.以及根据轨道巡检机器人的运行状态,获取速度最大值和速度最小值;
10.并将所述速度最大值和所述速度最小值发送至所述智能控制模块;
11.所述智能控制模块用于接收所述速度最大值和所述速度最小值,根据所述速度最大值和所述速度最小值获取速度调节区间;轨道巡检机器人根据所述速度调节区间调节运行速度。
12.优选的,所述数据采集模块包括第一压力传感器、第二压力传感器、第三压力传感器、第四压力传感器以及速度传感器;
13.所述速度传感器安装在轨道巡检机器人上;
14.第一压力传感器安装在轨道巡检机器人前进方向的左前方;
15.第二压力传感器安装在轨道巡检机器人前进方向的右前方;
16.第四压力传感器安装在轨道巡检机器人前进方向的左后方;
17.第三压力传感器安装在轨道巡检机器人前进方向的右后方。
18.优选的,所述数据采集模块获取压力值,具体过程包括:
19.设置采集周期,所述采集周期标记为t;其中,t为大于0的整数,单位为秒;
20.所述第一压力传感器每隔ts采集一次第一压力值,所述第一压力值标记为p
i1
;其中,i为采集周期的编号,i的取值为1,2,3
……
n;
21.所述第二压力传感器每隔ts采集一次第二压力值,所述第二压力值标记为p
i2
;
22.所述第三压力传感器每隔ts采集一次第三压力值,所述第三压力值标记为p
i3
;
23.所述第四压力传感器每隔ts采集一次第四压力值,所述第四压力值标记为p
i4
;
24.所述将所述第一压力值、第二压力值、第三压力值以及第四压力值发送至所述数据处理模块;
25.所述速度传感器每隔ts采集一次速度值,所述速度值标记为vi,单位为cm/s;
26.所述数据采集模块将所述速度值发送至所述数据处理模块。
27.优选的,所述数据处理模块根据所述压力值获取轨道巡检机器人的运行状态,具体过程包括:
28.所述数据处理模块接收所述第一压力值、第二压力值、第三压力值以及第四压力值;
29.根据所述第一压力值和所述第二压力值获取前压力差值,所述前压力差值标记为δp
12
;
30.所述前压力差值的计算公式为:δp
12
=p
1-p2;
31.根据所述第三压力值和所述第四压力值获取后压力差值,所述后压力差值标记为δp
34
;
32.所述后压力差值的计算公式为:δp
34
=p
3-p4;
33.所述数据处理模块设定压力差阈值,所述压力差阈值标记为δp
max
;
34.当|δp
12
|《δp
max
且|δp
34
|《δp
max
时,轨道巡检机器人的运行状态为直轨运行;
35.当p1》p2且|δp
12
|≥δp
max
,并且|δp
34
|《δp
max
时,轨道巡检机器人的运行状态为进入左弯轨道;
36.当p1《p2且|δp
12
|≥δp
max
,并且|δp
34
|《δp
max
时,轨道巡检机器人的运行状态为进入右弯轨道;
37.当|δp
12
|≥δp
max
且|δp
34
|≥δp
max
,轨道巡检机器人运行状态为弯轨运行。
38.优选的,所述数据处理模块根据轨道巡检机器人的运行状态,获取速度最大值和速度最小值,具体过程包括:
39.当轨道巡检机器人的运行状态为直轨运行,无需调节轨道巡检机器人的速度;
40.当轨道巡检机器人的运行状态为进入左弯轨道或进入右弯轨道或弯轨运行时,根据速度值和前压力差值获取偏移值,所述偏移值标记为δl,单位为cm;
41.所述偏移值的计算公式为:其中,k为压力传感器传导系数,与传感器选型相关;
42.所述数据处理模块设定偏移区间,所述偏移区间标记为l[x1,x2];
[0043]
当δl∈[x1,x2],无需调节轨道巡检机器人的速度,
[0044]
当根据x1获取速度最小值,所述速度最小值标记为v
min
;根据x2获取速度最大值,所述速度最大值标记为v
max
;
[0045]
所述速度最小值的计算公式为:
[0046]
所述速度最大值的计算公式为:
[0047]
将所述速度最小值和所述速度最大值发送至所述智能控制模块。
[0048]
优选的,所述智能控制模块根据所述速度最大值和所述速度最小值获取速度调节区间;轨道巡检机器人根据所述速度调节区间调节运行速度,具体过程包括:
[0049]
所述智能控制模块接收所述速度最小值和所述速度最大值;
[0050]
判断所述速度值与所述速度最小值和所述速度值的大小关系;
[0051]
当vi《v
min
时,根据所述速度最小值和所述速度最大值获取轨道巡检机器人的速度增加区间,所述速度增加区间为[v
min-vi,v
max-vi];
[0052]
所述智能控制模块将所述速度增加区间发送至轨道巡检机器人;
[0053]
轨道巡检机器人根据所述速度增加区间增加速度,增加的速度在速度增加区间内;
[0054]
当vi》v
min
时,根据所述速度最小值和所述速度最大值获取轨道巡检机器人的速度降低区间,所述速度降低区间为[v
i-v
max
,v
i-v
min
];
[0055]
所述智能控制模块将所述速度降低区间发送至轨道巡检机器人;
[0056]
轨道巡检机器人根据所述速度降低区间降低速度,降低的速度在速度降低区间内。
[0057]
优选的,还包括轨道检测模块;
[0058]
所述轨道检测模块用于检验轨道安装是否符合要求,具体过程包括:
[0059]
所述轨道检测模块设定标准速度;
[0060]
轨道巡检机器人以标准速度运行;
[0061]
所述数据采集模块获取轨道巡检机器人在运行过程中的压力值;
[0062]
根据所述压力值、所述标准速度以及偏移值的计算公式获取偏移值;
[0063]
所述轨道检测模块设定标准偏移区间;
[0064]
当所述偏移值在标准区间内时,则轨道安装符合要求;
[0065]
当所述偏移值不在标准区间内时,则轨道安装不符合要求。
[0066]
优选的,所述数据采集模块与所述数据处理模块通信和/或电气连接;
[0067]
所述数据采集模块与所述轨道检测模块通信和/或电气连接;
[0068]
所述数据处理模块和所述智能控制模块通信和/或电气连接。
[0069]
与现有技术相比,本发明的有益效果是:
[0070]
本发明通过数据采集模块采集压力值和速度值;并将压力值和速度值发送至数据处理模块;数据处理模块接收压力值,根据压力值获取轨道巡检机器人的运行状态;
[0071]
根据轨道巡检机器人的运行状态,获取速度最大值和速度最小值;并将速度最大值和速度最小值发送至智能控制模块;智能控制模块接收速度最大值和速度最小值,根据速度最大值和速度最小值获取速度调节区间;轨道巡检机器人根据速度调节区间调节运行速度;自动识别弯轨,调节机器人运行速度,保证设备可靠运行;
[0072]
通过轨道检测模块设定标准速度;轨道巡检机器人以标准速度运行;数据采集模
块获取轨道巡检机器人在运行过程中的压力值;根据压力值、标准速度以及偏移值的计算公式获取偏移值;轨道检测模块设定标准偏移区间;根据标准区间和偏移值检测轨道安装是否符合要求。
附图说明
[0073]
图1为本发明的原理图。
具体实施方式
[0074]
下面将结合实施例对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
[0075]
如图1所示,一种基于轨道巡检机器人快速行走的速度控制系统,包括数据采集模块、数据处理模块以及智能控制模块;各个模块之间基于数字信号的方式进行信息交互;
[0076]
所述数据采集模块用于采集压力值和速度值;
[0077]
并将所述压力值和所述速度值发送至所述数据处理模块;
[0078]
所述数据处理模块用于接收所述压力值,根据所述压力值获取轨道巡检机器人的运行状态;
[0079]
以及根据轨道巡检机器人的运行状态,获取速度最大值和速度最小值;
[0080]
并将所述速度最大值和所述速度最小值发送至所述智能控制模块;
[0081]
所述智能控制模块用于接收所述速度最大值和所述速度最小值,根据所述速度最大值和所述速度最小值获取速度调节区间;轨道巡检机器人根据所述速度调节区间调节运行速度。
[0082]
本实施例中,所述数据采集模块包括第一压力传感器、第二压力传感器、第三压力传感器、第四压力传感器以及速度传感器;需要进一步说明的是,辅助轮带伸缩弹簧,压力传感器位于辅助轮和轨道巡检机器人固定结构间,可以检测到辅助轮的弹簧方向的压力;
[0083]
所述速度传感器安装在轨道巡检机器人上;
[0084]
第一压力传感器安装在轨道巡检机器人前进方向的左前方;
[0085]
第二压力传感器安装在轨道巡检机器人前进方向的右前方;
[0086]
第四压力传感器安装在轨道巡检机器人前进方向的左后方;
[0087]
第三压力传感器安装在轨道巡检机器人前进方向的右后方。
[0088]
所述数据采集模块获取压力值,具体过程包括:
[0089]
设置采集周期,所述采集周期标记为t;其中,t为大于0的整数,单位为秒;
[0090]
所述第一压力传感器每隔ts采集一次第一压力值,所述第一压力值标记为p
i1
;其中,i为采集周期的编号,i的取值为1,2,3
……
n;
[0091]
所述第二压力传感器每隔ts采集一次第二压力值,所述第二压力值标记为p
i2
;
[0092]
所述第三压力传感器每隔ts采集一次第三压力值,所述第三压力值标记为p
i3
;
[0093]
所述第四压力传感器每隔ts采集一次第四压力值,所述第四压力值标记为p
i4
;
[0094]
所述将所述第一压力值、第二压力值、第三压力值以及第四压力值发送至所述数
据处理模块;
[0095]
所述速度传感器每隔ts采集一次速度值,所述速度值标记为vi,单位为cm/s;
[0096]
所述数据采集模块将所述速度值发送至所述数据处理模块。
[0097]
本实施例中,所述数据处理模块根据所述压力值获取轨道巡检机器人的运行状态,具体过程包括:
[0098]
所述数据处理模块接收所述第一压力值、第二压力值、第三压力值以及第四压力值;
[0099]
根据所述第一压力值和所述第二压力值获取前压力差值,所述前压力差值标记为δp
12
;
[0100]
所述前压力差值的计算公式为:δp
12
=p
1-p2;
[0101]
根据所述第三压力值和所述第四压力值获取后压力差值,所述后压力差值标记为δp
34
;
[0102]
所述后压力差值的计算公式为:δp
34
=p
3-p4;
[0103]
所述数据处理模块设定压力差阈值,所述压力差阈值标记为δp
max
;
[0104]
当|δp
12
|《δp
max
且|δp
34
|《δp
max
时,轨道巡检机器人的运行状态为直轨运行;
[0105]
当δp
12
≥δp
max
且|δp
34
|《δp
max
时,轨道巡检机器人的运行状态为进入左弯轨道;需要进一步说明的是,δp
12
》δp
max
,即p1》p2且|δp
12
|≥δp
max
;
[0106]
当δp
12
《0且|δp
12
|≥δp
max
,并且|δp
34
|《δp
max
时,轨道巡检机器人的运行状态为进入右弯轨道;
[0107]
当|δp
12
|≥δp
max
且|δp
34
|≥δp
max
,轨道巡检机器人运行状态为弯轨运行。
[0108]
本实施例中,所述数据处理模块根据轨道巡检机器人的运行状态,获取速度最大值和速度最小值,具体过程包括:
[0109]
当轨道巡检机器人的运行状态为直轨运行,无需调节轨道巡检机器人的速度;
[0110]
当轨道巡检机器人的运行状态为进入左弯轨道或进入右弯轨道或弯轨运行时,根据速度值和前压力差值获取偏移值,所述偏移值标记为δl,单位为cm;
[0111]
所述偏移值的计算公式为:其中,k为压力传感器传导系数,与传感器选型相关;
[0112]
所述数据处理模块设定偏移区间,所述偏移区间标记为l[x1,x2];
[0113]
当δl∈[x1,x2],无需调节轨道巡检机器人的速度,
[0114]
当根据x1获取速度最小值,所述速度最小值标记为v
min
;根据x2获取速度最大值,所述速度最大值标记为v
max
;
[0115]
所述速度最小值的计算公式为:
[0116]
所述速度最大值的计算公式为:
[0117]
将所述速度最小值和所述速度最大值发送至所述智能控制模块。
[0118]
所述智能控制模块根据所述速度最大值和所述速度最小值获取速度调节区间;轨道巡检机器人根据所述速度调节区间调节运行速度,具体过程包括:
[0119]
所述智能控制模块接收所述速度最小值和所述速度最大值;
[0120]
判断所述速度值与所述速度最小值和所述速度值的大小关系;
[0121]
当vi《v
min
时,即轨道巡检机器人的速度较低,根据所述速度最小值和所述速度最大值获取轨道巡检机器人的速度增加区间,所述速度增加区间为[v
min-vi,v
max-vi];
[0122]
所述智能控制模块将所述速度增加区间发送至轨道巡检机器人;
[0123]
轨道巡检机器人根据所述速度增加区间增加速度,增加的速度在速度增加区间内;
[0124]
当vi》v
min
时,即轨道巡检机器人的速度较高,根据所述速度最小值和所述速度最大值获取轨道巡检机器人的速度降低区间,所述速度降低区间为[v
i-v
max
,v
i-v
min
];
[0125]
所述智能控制模块将所述速度降低区间发送至轨道巡检机器人;
[0126]
轨道巡检机器人根据所述速度降低区间降低速度,降低的速度在速度降低区间内。
[0127]
本实施例中,所述数据采集模块与所述数据处理模块通信和/或电气连接;
[0128]
所述数据采集模块与所述轨道检测模块通信和/或电气连接;
[0129]
所述数据处理模块和所述智能控制模块通信和/或电气连接。
[0130]
本实施例中,还包括轨道检测模块;
[0131]
所述轨道检测模块用于检验轨道安装是否符合要求;
[0132]
所述轨道检测模块检验轨道安装是否符合要求,具体过程包括:
[0133]
所述轨道检测模块设定标准速度;
[0134]
轨道巡检机器人以标准速度运行;
[0135]
所述数据采集模块获取轨道巡检机器人在运行过程中的压力值;
[0136]
根据所述压力值、所述标准速度以及偏移值的计算公式获取偏移值;
[0137]
所述轨道检测模块设定标准偏移区间;
[0138]
当所述偏移值在标准区间内时,则轨道安装符合要求;
[0139]
当所述偏移值不在标准区间内时,则轨道安装不符合要求。
[0140]
上述公式均是去除量纲取其数值计算,公式是由采集大量数据进行软件模拟得到最接近真实情况的一个公式,公式中的预设参数和预设阈值由本领域的技术人员根据实际情况设定或者大量数据模拟获得。
[0141]
以上实施例仅用以说明本发明的技术方法而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方法进行修改或等同替换,而不脱离本发明技术方法的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1