一种农机作业指挥机器人
1.本发明涉及农业机械领域,更具体的说是一种农机作业指挥机器人。
背景技术:
2.例如cn201521062604.5公开了一种交通指挥机器人,包括底座、行走机构、立柱组件和指挥手;在下底盘和上底盘之间设有两立板,在两立板之间形成有容置腔;支承架固定在上底盘上;行走机构包括两组行走装置,行走装置包括伺服电机、联轴器、转轴和行走轮,立柱组件安装在支承架上;在立柱组件的两侧分别安装有指挥手。本实用新型能提高稳定性。
技术实现要素:
3.本发明的目的是提供一种农机作业指挥机器人,通用于农田,发明带有充电站部件可以通过将太阳能转换为电能为指挥机器人,还带有移动部件可以进行移动作业,同时带有指挥机器人部件可代替人工指挥农机作业大大节约了人工成本,还带有无人机部件可以从空中多方位监测农机的动作情况方便可以实时指挥农机进行作业,实现机械化种植提高了作业效率,降低了作业成本。
4.本发明的目的通过以下技术方案来实现:
5.一种农机作业指挥机器人,包括充电站部件、移动部件、机器人指挥部件、无人机部件,所述移动部件与机器人指挥部件相连接,无人机部件与充电站部件相连接,充电站部件置于移动部件、机器人指挥部件旁。
6.作为本技术方案的进一步优化,本发明一种农机作业指挥机器人,所述充电站部件包括太阳能电池板、充电站外壳、无人机起落台放置平台、无线充电台、挡板、挡板开合齿轮轴、挡板开合动力轮、皮带a、挡板开合电机、挡板开合动力轴转块、挡板开合动力轴、挡板开合动力轴齿轮、挡板开合电机齿轮,无人机起落台放置平台、挡板开合动力轴转块均与充电站外壳焊接连接,太阳能电池板与充电站外壳转动连接,无线充电台与充电站外壳固定连接,挡板与充电站外壳转动连接,挡板开合齿轮轴与充电站外壳转动连接,挡板与挡板开合齿轮轴啮合连接,挡板开合齿轮轴与皮带a传动连接,皮带a与挡板开合动力轮传动连接,挡板开合动力轮与挡板开合动力轴固定连接,挡板开合动力轴与挡板开合动力轴转块转动连接,挡板开合动力轴与挡板开合动力轴齿轮固定连接,挡板开合动力轴齿轮与挡板开合电机齿轮啮合连接,挡板开合电机齿轮与挡板开合电机输出轴固定连接,太阳能电池板与无线充电台电性连接。
7.作为本技术方案的进一步优化,本发明一种农机作业指挥机器人,所述移动部件包括移动车架、动力轮、移动电机、移动电机轮、轮子转块、辅助轮、履带、皮带b,轮子转块与移动车架焊接连接,动力轮与轮子转块转动连接,移动电机与移动车架固定连接,移动电机轮与移动电机输出轴固定连接,移动电机轮与皮带b传动连接,皮带b与动力轮传动连接,辅助轮与轮子转块转动连接,轮子转块与履带传动连接,履带与辅助轮传动连接,移动部件整
体置于充电站外壳旁。
8.作为本技术方案的进一步优化,本发明一种农机作业指挥机器人,所述机器人指挥部件包括固定板、滑块、滑块连接块、抬升链接a、抬升链接b、抬升链接c、抬升链接d、机器人转动支撑架、机器人转动电机、太阳轮盘、机器人外壳、机器人手臂抬放电机齿轮、机器人手臂链接a、机器人手臂链接b、机器人手臂链接c、机器人手臂链接d、机器人电子摄像头、指示灯、机器人电子摄像头转动块、螺杆、抬升电机、抬升电机轮、皮带c、行星架、行星齿轮、太阳齿轮、机器人手臂链接c动力电机、机器人手臂链接c动力电机齿轮、机器人手臂链接c转动齿轮、机器人手臂链接e、机器人手臂链接e动力电机、机器人手臂链接e动力电机轮、齿轮a、转动杆、机器人手臂链接e拉动杆转动链接、机器人手臂链接e拉动杆、皮带d、机器人手臂动力链接、机器人手臂运动电机、转孔、机器人电子摄像头转孔,固定板与移动车架固定连接,滑块与固定板滑动连接,滑块连接块分别与固定板、滑块固定连接,螺杆与滑块连接块转动连接,抬升电机与滑块连接块固定连接,抬升电机轮与抬升电机输出轴固定连接,抬升电机轮与皮带c传动连接,皮带c与螺杆传动连接,抬升链接a分别与固定板、抬升链接b、抬升链接c转动连接,抬升链接b分别与滑块、抬升链接a、抬升链接d转动连接,抬升链接c分别与抬升链接a、固定板、抬升链接d转动连接,抬升链接d分别与滑块、抬升链接b、抬升链接c转动连接,机器人转动支撑架与固定板固定连接,机器人转动电机与机器人转动支撑架固定连接,太阳轮盘与机器人转动支撑架固定的连接,机器人转动电机与太阳轮盘转动连接,太阳齿轮与机器人转动电机输出轴固定连接,行星齿轮分别与太阳齿轮、太阳轮盘啮合连接,行星架与行星齿轮转动连接,机器人外壳与行星架固定连接,指示灯、转孔、机器人电子摄像头转孔均与机器人外壳焊接连接,机器人手臂运动电机输出轴与转孔转动连接,机器人手臂抬放电机齿轮与机器人手臂运动电机输出轴固定连接,机器人手臂抬放电机齿轮与机器人手臂动力链接啮合连接,机器人手臂动力链接与转孔转动连接,机器人手臂动力链接与机器人手臂链接a转动连接,机器人手臂链接a与机器人手臂链接b转动连接,机器人手臂链接b分别与机器人手臂链接c、机器人外壳转动连接,机器人手臂链接c动力电机与机器人手臂链接b固定连接,机器人手臂链接c动力电机齿轮与机器人手臂链接c动力电机输出轴固定连接,机器人手臂链接c动力电机齿轮与机器人手臂链接c转动齿轮啮合连接,机器人手臂链接c转动齿轮与机器人手臂链接c固定连接,机器人手臂链接c与机器人手臂链接d转动连接,机器人手臂链接e动力电机与机器人手臂链接d固定连接,机器人手臂链接e动力电机轮与机器人手臂链接e动力电机输出轴固定连接,机器人手臂链接e动力电机轮与皮带d传动连接,皮带d与转动杆传动连接,转动杆与机器人手臂链接d转动连接,齿轮a与转动杆固定连接,齿轮a与机器人手臂链接e拉动杆转动链接啮合连接,机器人手臂链接e拉动杆转动链接与机器人手臂链接d转动连接,机器人手臂链接e拉动杆与机器人手臂链接e拉动杆转动链接转动连接,机器人手臂链接e分别与机器人手臂链接e、机器人手臂链接e拉动杆转动连接,机器人电子摄像头与机器人电子摄像头转动块转动连接,机器人电子摄像头转动块与机器人电子摄像头转孔转动连接。
9.作为本技术方案的进一步优化,本发明一种农机作业指挥机器人,所述无人机部件包括无人机起落台、无人机夹持器运动电机、无人机夹持器运动电机齿轮、无人机夹持器链接a、无人机本体、无人机扇叶、无人机放置板、无人机夹持器夹板、无人机夹持器链接b、无人机夹持器链接a滑动口,无人机起落台与无人机起落台放置平台固定连接,无人机放置
板、无人机夹持器链接a滑动口均与无人机起落台焊接连接,无人机夹持器运动电机与无人机起落台固定连接,无人机夹持器运动电机齿轮与无人机夹持器运动电机输出轴固定连接,无人机夹持器运动电机齿轮与无人机夹持器链接a啮合连接,无人机夹持器链接a与无人机夹持器链接a滑动口滑动连接,无人机夹持器链接a与无人机夹持器链接b转动连接,无人机夹持器链接b与无人机夹持器夹板转动连接,无人机夹持器夹板与无人机放置板转动连接,无人机本体放置在无人机放置板上,无人机扇叶与无人机本体转动连接。
10.本发明一种农机作业指挥机器人的有益效果为:通用于农田,发明带有充电站部件可以通过将太阳能转换为电能为指挥机器人,还带有移动部件可以进行移动作业,同时带有指挥机器人部件可代替人工指挥农机作业大大节约了人工成本,还带有无人机部件可以从空中多方位监测农机的动作情况方便可以实时指挥农机进行作业,实现机械化种植提高了作业效率,降低了作业成本。
附图说明
11.下面结合附图和具体实施方法对本发明做进一步详细的说明。
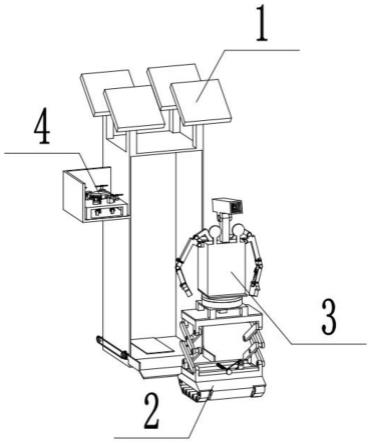
12.图1是本发明的整体结构示意图一;
13.图2是本发明的充电站部件结构示意图一;
14.图3是本发明的充电站部件结构示意图二;
15.图4是本发明的充电站部件结构示意图三;
16.图5是本发明的移动部件结构示意图一;
17.图6是本发明的机器人指挥部件结构示意图一;
18.图7是本发明的机器人指挥部件结构示意图二;
19.图8是本发明的机器人指挥部件结构示意图三;
20.图9是本发明的机器人指挥部件结构示意图四;
21.图10是本发明的机器人指挥部件结构示意图五;
22.图11是本发明的机器人指挥部件结构示意图六;
23.图12是本发明的机器人指挥部件结构示意图七;
24.图13是本发明的机器人指挥部件结构示意图八;
25.图14是本发明的机器人指挥部件结构示意图九;
26.图15是本发明的机器人指挥部件结构示意图十;
27.图16是本发明的机器人指挥部件结构示意图十一;
28.图17是本发明的机器人指挥部件结构示意图十二;
29.图18是本发明的机器人指挥部件结构示意图十三;
30.图19是本发明的机器人指挥部件结构示意图十四;
31.图20是本发明的机器人指挥部件结构示意图十五;
32.图21是本发明的机器人指挥部件结构示意图十六;
33.图22是本发明的机器人指挥部件结构示意图十七;
34.图23是本发明的机器人指挥部件结构示意图十八;
35.图24是本发明的机器人指挥部件结构示意图十九;
36.图25是本发明的无人机部件结构示意图一;
37.图26是本发明的无人机部件结构示意图二;
38.图27是本发明的无人机部件结构示意图三;
39.图28是本发明的无人机部件结构示意图四。
40.图中:充电站部件1;太阳能电池板1-1;充电站外壳1-2;无人机起落台放置平台1-3;无线充电台1-4;挡板1-5;挡板开合齿轮轴1-6;挡板开合动力轮1-7;皮带a1-8;挡板开合电机1-9;挡板开合动力轴转块1-10;挡板开合动力轴1-11;挡板开合动力轴齿轮1-12;挡板开合电机齿轮1-13;移动部件2;移动车架2-1;动力轮2-2;移动电机2-3;移动电机轮2-4;轮子转块2-5;辅助轮2-6;履带2-7;皮带b2-8;机器人指挥部件3;固定板3-1;滑块3-2;滑块连接块3-3;抬升链接a3-4;抬升链接b3-5;抬升链接c3-6;抬升链接d 3-7;机器人转动支撑架3-8;机器人转动电机3-9;太阳轮盘3-10;机器人外壳3-11;机器人手臂抬放电机齿轮3-12;机器人手臂链接a3-13;机器人手臂链接b3-14;机器人手臂链接c3-15;机器人手臂链接d3-16;机器人电子摄像头3-17;指示灯3-18;机器人电子摄像头转动块3-19;螺杆3-20;抬升电机3-21;抬升电机轮3-22;皮带c3-23;行星架3-24;行星齿轮3-25;太阳齿轮3-26;机器人手臂链接c动力电机3-27;机器人手臂链接c动力电机齿轮3-28;机器人手臂链接c转动齿轮3-29;机器人手臂链接e3-30;机器人手臂链接e动力电机3-31;机器人手臂链接e动力电机轮3-32;齿轮a3-33;转动杆3-34;机器人手臂链接e拉动杆转动链接3-35;机器人手臂链接e拉动杆3-36;皮带d3-37;机器人手臂动力链接3-38;机器人手臂运动电机3-39;转孔3-40;机器人电子摄像头转孔3-41;无人机部件4;无人机起落台4-1;无人机夹持器运动电机4-2;无人机夹持器运动电机齿轮4-3;无人机夹持器链接a4-4;无人机本体4-5;无人机扇叶4-6;无人机放置板4-7;无人机夹持器夹板4-8;无人机夹持器链接b4-9;无人机夹持器链接a滑动口4-10。
具体实施方式
41.下面结合附图对本发明作进一步详细说明。
42.本装置中所述的固定连接是指通过焊接、螺纹固定等方式进行固定,结合不同的使用环境,使用不同的固定方式,所述的转动连接是指通过将轴承烘装在轴上,轴或轴孔上设置有弹簧挡圈槽,通过将弹性挡圈卡在挡圈槽内实现轴承的轴向固定,实现转动,所述的滑动连接是指通过滑块在滑槽或导轨内的滑动进行连接,所述的铰接是指通过在铰链,销轴和短轴等连接零件上进行活动的连接方式,所需密封处均是通过密封圈或o形圈实现密封。
43.具体实施方式一:
44.下面结合图1-28说明本实施方式,一种农机作业指挥机器人,包括充电站部件1、移动部件2、机器人指挥部件3、无人机部件4,所述移动部件2与机器人指挥部件3相连接,无人机部件4与充电站部件1相连接,充电站部件1置于移动部件2、机器人指挥部件3旁。
45.具体实施方式二:
46.下面结合图1-28说明本实施方式,本实施方式对实施方式一作进一步说明,所述充电站部件1包括太阳能电池板1-1、充电站外壳1-2、无人机起落台放置平台1-3、无线充电台1-4、挡板1-5、挡板开合齿轮轴1-6、挡板开合动力轮1-7、皮带a1-8、挡板开合电机1-9、挡板开合动力轴转块1-10、挡板开合动力轴1-11、挡板开合动力轴齿轮1-12、挡板开合电机齿
轮1-13,无人机起落台放置平台1-3、挡板开合动力轴转块1-10均与充电站外壳1-2焊接连接,太阳能电池板1-1与充电站外壳1-2转动连接,无线充电台1-4与充电站外壳1-2固定连接,挡板1-5与充电站外壳1-2转动连接,挡板开合齿轮轴1-6与充电站外壳1-2转动连接,挡板1-5与挡板开合齿轮轴1-6啮合连接,挡板开合齿轮轴1-6与皮带a1-8传动连接,皮带a1-8与挡板开合动力轮1-7传动连接,挡板开合动力轮1-7与挡板开合动力轴1-11固定连接,挡板开合动力轴1-11与挡板开合动力轴转块1-10转动连接,挡板开合动力轴1-11与挡板开合动力轴齿轮1-12固定连接,挡板开合动力轴齿轮1-12与挡板开合电机齿轮1-13啮合连接,挡板开合电机齿轮1-13与挡板开合电机1-9输出轴固定连接,太阳能电池板1-1与无线充电台1-4电性连接,
47.启动挡板开合电机1-9,挡板开合电机1-9输出轴转动带动挡板开合电机齿轮1-13转动,挡板开合电机齿轮1-13转动带动挡板开合动力轴齿轮1-12转动,挡板开合动力轴齿轮1-12转动带动挡板开合动力轴1-11绕着挡板开合动力轴转块1-10转动,挡板开合动力轴1-11转动带动挡板开合动力轮1-7转动,挡板开合动力轮1-7转动带动皮带a1-8动,皮带a1-8动带动挡板开合齿轮轴1-6转动绕着固定轨迹转动,挡板开合齿轮轴1-6转动带动挡板1-5绕着固定轨迹转动从而实现挡板开合的动作,转动太阳能电池板1-1将太阳能电池板1-1对向太阳从而将太阳能转换为电能储存在无线充电台1-4中为移动部件2、机器人指挥部件3充电。
48.具体实施方式三:
49.下面结合图1-28说明本实施方式,本实施方式对实施方式一作进一步说明,所述移动部件2包括移动车架2-1、动力轮2-2、移动电机2-3、移动电机轮2-4、轮子转块2-5、辅助轮2-6、履带2-7、皮带b2-8,轮子转块2-5与移动车架2-1焊接连接,动力轮2-2与轮子转块2-5转动连接,移动电机2-3与移动车架2-1固定连接,移动电机轮2-4与移动电机2-3输出轴固定连接,移动电机轮2-4与皮带b2-8传动连接,皮带b2-8与动力轮2-2传动连接,辅助轮2-6与轮子转块2-5转动连接,轮子转块2-5与履带2-7传动连接,履带2-7与辅助轮2-6传动连接,移动部件2整体置于充电站外壳1-2旁,
50.启动移动电机2-3,移动电机2-3输出轴转动带动移动电机轮2-4转动,移动电机轮2-4转动带动皮带b2-8动,皮带b2-8动带动动力轮2-2绕着轮子转块2-5转动,动力轮2-2转动带动履带2-7动,履带2-7动带动辅助轮2-6绕着轮子转块2-5转动从而实现移动的动作。
51.具体实施方式四:
52.下面结合图1-28说明本实施方式,本实施方式对实施方式一作进一步说明,所述机器人指挥部件3包括固定板3-1、滑块3-2、滑块连接块3-3、抬升链接a3-4、抬升链接b3-5、抬升链接c3-6、抬升链接d 3-7、机器人转动支撑架3-8、机器人转动电机3-9、太阳轮盘3-10、机器人外壳3-11、机器人手臂抬放电机齿轮3-12、机器人手臂链接a3-13、机器人手臂链接b3-14、机器人手臂链接c3-15、机器人手臂链接d3-16、机器人电子摄像头3-17、指示灯3-18、机器人电子摄像头转动块3-19、螺杆3-20、抬升电机3-21、抬升电机轮3-22、皮带c3-23、行星架3-24、行星齿轮3-25、太阳齿轮3-26、机器人手臂链接c动力电机3-27、机器人手臂链接c动力电机齿轮3-28、机器人手臂链接c转动齿轮3-29、机器人手臂链接e3-30、机器人手臂链接e动力电机3-31、机器人手臂链接e动力电机轮3-32、齿轮a3-33、转动杆3-34、机器人手臂链接e拉动杆转动链接3-35、机器人手臂链接e拉动杆3-36、皮带d3-37、机器人手臂动
力链接3-38、机器人手臂运动电机3-39、转孔3-40、机器人电子摄像头转孔3-41,固定板3-1与移动车架2-1固定连接,滑块3-2与固定板3-1滑动连接,滑块连接块3-3分别与固定板3-1、滑块3-2固定连接,螺杆3-20与滑块连接块3-3转动连接,抬升电机3-21与滑块连接块3-3固定连接,抬升电机轮3-22与抬升电机3-21输出轴固定连接,抬升电机轮3-22与皮带c3-23传动连接,皮带c3-23与螺杆3-20传动连接,抬升链接a3-4分别与固定板3-1、抬升链接b3-5、抬升链接c3-6转动连接,抬升链接b3-5分别与滑块3-2、抬升链接a3-4、抬升链接d 3-7转动连接,抬升链接c3-6分别与抬升链接a3-4、固定板3-1、抬升链接d 3-7转动连接,抬升链接d 3-7分别与滑块3-2、抬升链接b3-5、抬升链接c3-6转动连接,机器人转动支撑架3-8与固定板3-1固定连接,机器人转动电机3-9与机器人转动支撑架3-8固定连接,太阳轮盘3-10与机器人转动支撑架3-8固定的连接,机器人转动电机3-9与太阳轮盘3-10转动连接,太阳齿轮3-26与机器人转动电机3-9输出轴固定连接,行星齿轮3-25分别与太阳齿轮3-26、太阳轮盘3-10啮合连接,行星架3-24与行星齿轮3-25转动连接,机器人外壳3-11与行星架3-24固定连接,指示灯3-18、转孔3-40、机器人电子摄像头转孔3-41均与机器人外壳3-11焊接连接,机器人手臂运动电机3-39输出轴与转孔3-40转动连接,机器人手臂抬放电机齿轮3-12与机器人手臂运动电机3-39输出轴固定连接,机器人手臂抬放电机齿轮3-12与机器人手臂动力链接3-38啮合连接,机器人手臂动力链接3-38与转孔3-40转动连接,机器人手臂动力链接3-38与机器人手臂链接a3-13转动连接,机器人手臂链接a3-13与机器人手臂链接b3-14转动连接,机器人手臂链接b3-14分别与机器人手臂链接c3-15、机器人外壳3-11转动连接,机器人手臂链接c动力电机3-27与机器人手臂链接b3-14固定连接,机器人手臂链接c动力电机齿轮3-28与机器人手臂链接c动力电机3-27输出轴固定连接,机器人手臂链接c动力电机齿轮3-28与机器人手臂链接c转动齿轮3-29啮合连接,机器人手臂链接c转动齿轮3-29与机器人手臂链接c3-15固定连接,机器人手臂链接c3-15与机器人手臂链接d3-16转动连接,机器人手臂链接e动力电机3-31与机器人手臂链接d3-16固定连接,机器人手臂链接e动力电机轮3-32与机器人手臂链接e动力电机3-31输出轴固定连接,机器人手臂链接e动力电机轮3-32与皮带d3-37传动连接,皮带d3-37与转动杆3-34传动连接,转动杆3-34与机器人手臂链接d3-16转动连接,齿轮a3-33与转动杆3-34固定连接,齿轮a3-33与机器人手臂链接e拉动杆转动链接3-35啮合连接,机器人手臂链接e拉动杆转动链接3-35与机器人手臂链接d3-16转动连接,机器人手臂链接e拉动杆3-36与机器人手臂链接e拉动杆转动链接3-35转动连接,机器人手臂链接e3-30分别与机器人手臂链接e3-30、机器人手臂链接e拉动杆3-36转动连接,机器人电子摄像头3-17与机器人电子摄像头转动块3-19转动连接,机器人电子摄像头转动块3-19与机器人电子摄像头转孔3-41转动连接,
53.启动抬升电机3-21,抬升电机3-21输出轴转动带动抬升电机轮3-22转动,抬升电机轮3-22转动带动皮带c3-23动,皮带c3-23动带动螺杆3-20绕着滑块连接块3-3固定的轨迹转动从而拉动滑块连接块3-3,滑块连接块3-3动带动滑块3-2沿着固定板3-1固定的轨迹滑动,滑块3-2动带动抬升链接b3-5绕着滑块3-2、抬升链接a3-4、抬升链接d 3-7固定的轨迹转动,抬升链接b3-5动带动抬升链接a3-4绕着固定板3-1、抬升链接b3-5、抬升链接c3-6固定的轨迹转动,抬升链接b3-5动同时带动抬升链接d 3-7绕着滑块3-2、抬升链接b3-5、抬升链接c3-6固定的轨迹转动,抬升链接a3-4动带动抬升链接c3-6绕着抬升链接a3-4、固定板3-1、抬升链接d 3-7固定的轨迹转动,抬升链接d 3-7带动滑块3-2沿着固定板3-1固定的
轨迹滑动,抬升链接c3-6动带动固定板3-1动从而实现抬升的动作,启动机器人转动电机3-9,机器人转动电机3-9输出轴绕着太阳轮盘3-10固定轨迹转动,机器人转动电机3-9输出轴转动带动太阳齿轮3-26转动,太阳齿轮3-26转动带动行星齿轮3-25沿着太阳齿轮3-26、太阳轮盘3-10配合形成的轨迹动,行星齿轮3-25动带动行星架3-24转动,行星架3-24转动带动机器人外壳3-11转动从而实现机器人转身的动作,启动机器人手臂运动电机3-39,机器人手臂运动电机3-39输出轴转绕着转孔3-40转动,机器人手臂运动电机3-39输出轴转动带动机器人手臂抬放电机齿轮3-12转动,机器人手臂抬放电机齿轮3-12转动带动机器人手臂动力链接3-38绕着转孔3-40转动,机器人手臂动力链接3-38动带动机器人手臂链接a3-13动,机器人手臂链接a3-13动带动机器人手臂链接b3-14绕着机器人外壳3-11固定轨迹转动,机器人手臂链接b3-14动带动机器人手臂链接c3-15动,启动机器人手臂链接c动力电机3-27,机器人手臂链接c动力电机3-27输出轴转动带动机器人手臂链接c动力电机齿轮3-28转动,机器人手臂链接c动力电机齿轮3-28转动带动机器人手臂链接c转动齿轮3-29转动,机器人手臂链接c转动齿轮3-29转动带动机器人手臂链接c3-15绕着机器人手臂链接b3-14固定轨迹转动,机器人手臂链接c3-15动带动机器人手臂链接d3-16动,机器人手臂链接d3-16动带动机器人手臂链接e3-30动,启动机器人手臂链接e动力电机3-31,机器人手臂链接e动力电机3-31输出轴转动带动机器人手臂链接e动力电机轮3-32转动,机器人手臂链接e动力电机轮3-32转动带动皮带d3-37动,皮带d3-37动带动转动杆3-34绕着机器人手臂链接d3-16固定轨迹转动,转动杆3-34转动带动齿轮a3-33转动,齿轮a3-33转动带动机器人手臂链接e拉动杆转动链接3-35绕着机器人手臂链接d3-16固定轨迹转动,机器人手臂链接e拉动杆转动链接3-35转动带动机器人手臂链接e拉动杆3-36动,机器人手臂链接e拉动杆3-36动带动机器人手臂链接e3-30绕着机器人手臂链接d3-16固定轨迹转动,通过以上动作操控机器人手臂实现指挥农机的动作,同时可以转动机器人电子摄像头3-17使机器人电子摄像头3-17绕着机器人电子摄像头转动块3-19固定轨迹转动,还可以转动机器人电子摄像头转动块3-19使其绕着机器人电子摄像头转孔3-41转动从而实现手动调整角度监测农机工况方便进行指挥。
54.具体实施方式五:
55.下面结合图1-28说明本实施方式,本实施方式对实施方式一作进一步说明,所述无人机部件4包括无人机起落台4-1、无人机夹持器运动电机4-2、无人机夹持器运动电机齿轮4-3、无人机夹持器链接a4-4、无人机本体4-5、无人机扇叶4-6、无人机放置板4-7、无人机夹持器夹板4-8、无人机夹持器链接b4-9、无人机夹持器链接a滑动口4-10,无人机起落台4-1与无人机起落台放置平台1-3固定连接,无人机放置板4-7、无人机夹持器链接a滑动口4-10均与无人机起落台4-1焊接连接,无人机夹持器运动电机4-2与无人机起落台4-1固定连接,无人机夹持器运动电机齿轮4-3与无人机夹持器运动电机4-2输出轴固定连接,无人机夹持器运动电机齿轮4-3与无人机夹持器链接a4-4啮合连接,无人机夹持器链接a4-4与无人机夹持器链接a滑动口4-10滑动连接,无人机夹持器链接a4-4与无人机夹持器链接b4-9转动连接,无人机夹持器链接b4-9与无人机夹持器夹板4-8转动连接,无人机夹持器夹板4-8与无人机放置板4-7转动连接,无人机本体4-5放置在无人机放置板4-7上,无人机扇叶4-6与无人机本体4-5转动连接,
56.无人机扇叶4-6绕着无人机本体4-5固定轨迹转动带动无人机本体4-5飞起,实现
动态监测农机工况使得机器人指挥部件3可以更好的指挥农机进行作业,启动无人机夹持器运动电机4-2,无人机夹持器运动电机4-2输出轴转动带动人机夹持器运动电机齿轮4-3转动,人机夹持器运动电机齿轮4-3转动带动无人机夹持器链接a4-4沿着无人机夹持器链接a滑动口4-10滑动,无人机夹持器链接a4-4动带动无人机夹持器链接b4-9动,无人机夹持器链接b4-9动带动无人机夹持器夹板4-8绕着无人机放置板4-7固定轨迹转动实现夹持无人机的动作。
57.当然,上述说明并非对本发明的限制,本发明也不仅限于上述举例,本技术领域的普通技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1