学校巡查机器人的制作方法
1.本发明涉及校园智慧机器人的技术领域,具体为学校巡查机器人。
背景技术:
2.由于社会的高速发展,校园安全已经成为大家关心的焦点话题,目前校园巡逻都是人工进行巡逻,这不仅仅是在校园,在人们的日常工作生活中,往往都是采用人工进行巡逻,尽管人工巡逻存在很大的安全性以及保障,但是会出现以下问题:1、在出现恶劣的天气下巡逻人员无法正常巡逻;2、在夜晚巡逻人的视线有限,不能够清楚的观察的黑夜中的事物;3、人工巡逻毕竟不是机器,巡逻的值班人们很容易出现懈怠情绪,造成巡逻效率不高,且人工巡逻浪费生产力;目前已经存在巡逻机器人,其存在的缺点是单方向的进行拍摄以及设置的行走结构是仿照人的行走方式或者采用轮子进行移动,但是,现有的巡逻机器人在校园内部巡逻时,遇到车辆或者行人可能发生碰撞的风险,而且机器人也无法识别可疑人员。
3.所以针对这些问题,我们提出了学校巡查机器人来解决。
技术实现要素:
4.针对现有技术的不足,本发明提供了学校巡查机器人,解决了现有的巡逻机器人在校园内部巡逻时,遇到车辆或者行人可能发生碰撞的风险,而且机器人也无法识别可疑人员的问题。
5.为实现上述目的,本发明提供如下技术方案:
6.学校巡查机器人,包括行进机构以及安装在所述行进机构上方的机器人主体,所述行进机构包括第一红外监控机构,所述机器人主体包括机械掌以及所述机械掌上方固定连接的第二红外监控机构,所述机械掌的外侧固定连接有机械泵,所述机械泵的外表面活动连接有连接桥,所述机械泵远离机械掌的一端活动连接有承接块,所述承接块的外侧固定连接有机械夹爪。
7.进一步的,所述行进机构还包括安装支架,所述安装支架的外侧活动安装有前进轮,所述安装支架的上表面固定连接有固定把手,所述固定把手设置有两组,所述第一红外监控机构设置在两组所述固定把手之间。
8.进一步的,所述机器人主体还包括与所述安装支架表面相连接的转动圆盘,所述转动圆盘上方固定连接有机械胸膛,所述机械胸膛的外表面固定安装有第三红外监控机构。
9.进一步的,所述机械胸膛的上方活动连接有机械头颅,所述机械头颅的上方活动连接有监控摄像头。
10.进一步的,所述机械胸膛的外侧活动连接有机械臂膀,所述机械臂膀的外侧活动连接有机械胳膊,所述机械胳膊的外侧活动连接有机械手臂,所述机械胳膊与所述机械手臂的连接处穿接有第一轴杆。
11.进一步的,所述机械手臂远离机械胳膊的一端活动连接有机械小臂,所述机械手臂与所述机械小臂连接处穿接有第二轴杆,所述机械小臂的外侧活动连接有机械掌。
12.进一步的,所述机器人主体通过所述转动圆盘活动安装在所述行进机构的上表面,所述机器人主体通过所述转动圆盘可以实现在所述行进机构上表面的转动。
13.进一步的,所述第一红外监控机构、第二红外监控机构、第三红外监控机构以及监控摄像头均具备夜视功能。
14.本发明技术方案,具有如下有益效果:
15.1、该学校巡查机器人,通过红外信号感知机器人主体离障碍物或者车辆之间的距离,通过发射出的红外信号反馈给第一红外监控机构障碍物距离,行进机构从而控制前进轮的刹停,从而实现对机器人主体的精准避障。
16.2、该学校巡查机器人,通过内置的机械驱动机构控制机械胳膊、机械手臂以及机械小臂模拟人类手臂运动,以第一轴杆以及第二轴杆为转动基点转动从而实现对人类手臂工作的模拟。
17.3、该学校巡查机器人,通过红外信号反馈感知机械掌距离学生的距离,避免机械掌离学生距离过近,对学生造成损伤的问题。
18.4、该学校巡查机器人,通过机械泵工作,带动连接桥运动,承接块带动两组机械夹爪进行夹持合拢,机械夹爪继而对学生的书包等其他重物进行夹持,减轻学生的负担,也增加学生的校园乐趣。
19.5、该学校巡查机器人,通过机器人主体内部存储所有师生的人脸信息,当机器人主体上方的监控摄像头扫描到未记录的陌生人脸信息,将会发出报警声,并后台提醒学校工作人员,保证师生的安全,避免可疑人员进行校园。
附图说明
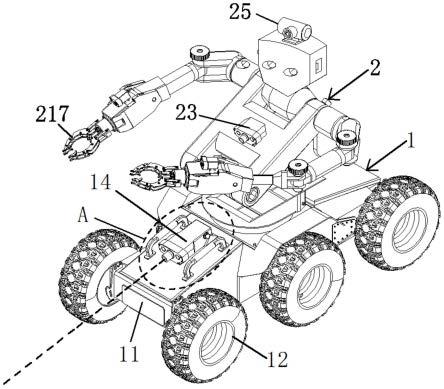
20.图1为本发明整体结构示意图;
21.图2为本发明图1中a区域结构放大示意图;
22.图3为本发明机器人主体连接结构示意图;
23.图4为本发明机械掌连接结构示意图;
24.图5为本发明图4中b区域结构放大示意图;
25.图6为本发明机械夹爪连接结构示意图。
26.图中:1、行进机构;11、安装支架;12、前进轮;13、固定把手;14、第一红外监控机构;
27.2、机器人主体;21、转动圆盘;22、机械胸膛;23、第三红外监控机构;24、机械头颅;25、监控摄像头;26、机械臂膀;27、机械胳膊;28、机械手臂;29、第一轴杆;210、机械小臂;211、第二轴杆;212、机械掌;213、第二红外监控机构;214、机械泵;215、连接桥;216、承接块;217、机械夹爪。
具体实施方式
28.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于
本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
29.在本公开中,术语如“上”、“下”、“左”、“右”、“前”、“后”、“竖直”、“水平”、“侧”、“底”等指示的方位或位置关系为基于附图所示的方位或位置关系,只是为了便于叙述本公开各部件或元件结构关系而确定的关系词,并非特指本公开中任一部件或元件,不能理解为对本公开的限制。
30.本公开中,术语如“固接”、“相连”、“连接”等应做广义理解,表示可以是固定连接,也可以是一体地连接或可拆卸连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的相关科研或技术人员,可以根据具体情况确定上述术语在本公开中的具体含义,不能理解为对本公开的限制。
31.请参阅图1-图6,学校巡查机器人,包括行进机构1以及安装在行进机构1上方的机器人主体2,行进机构1包括第一红外监控机构14,机器人主体2包括机械掌212以及机械掌212上方固定连接的第二红外监控机构213,机械掌212的外侧固定连接有机械泵214,机械泵214的外表面活动连接有连接桥215,机械泵214远离机械掌212的一端活动连接有承接块216,承接块216的外侧固定连接有机械夹爪217。
32.行进机构1还包括安装支架11,安装支架11的外侧活动安装有前进轮12,安装支架11的上表面固定连接有固定把手13,固定把手13设置有两组,第一红外监控机构14设置在两组固定把手13之间。
33.机器人主体2通过行进机构1上的前进轮12进行运动,实现机器人主体2的整体运动,在机器人主体2进行前进时,行进机构1上的第一红外监控机构14以及机器人主体2上的第三红外监控机构23同时发出红外线信号,红外信号感知机器人主体2离障碍物或者车辆之间的距离,通过发射出的红外信号反馈给第一红外监控机构14障碍物距离,行进机构1从而控制前进轮12的刹停,从而实现对机器人主体2的精准避障。
34.机器人主体2还包括与安装支架11表面相连接的转动圆盘21,转动圆盘21上方固定连接有机械胸膛22,机械胸膛22的外表面固定安装有第三红外监控机构23,机械胸膛22的上方活动连接有机械头颅24,机械头颅24的上方活动连接有监控摄像头25,机械胸膛22的外侧活动连接有机械臂膀26,机械臂膀26的外侧活动连接有机械胳膊27,机械胳膊27的外侧活动连接有机械手臂28,机械胳膊27与机械手臂28的连接处穿接有第一轴杆29,机械手臂28远离机械胳膊27的一端活动连接有机械小臂210,机械手臂28与机械小臂210连接处穿接有第二轴杆211,机械小臂210的外侧活动连接有机械掌212,机器人主体2通过转动圆盘21活动安装在行进机构1的上表面,机器人主体2通过转动圆盘21可以实现在行进机构1上表面的转动,第一红外监控机构14、第二红外监控机构213、第三红外监控机构23以及监控摄像头25均具备夜视功能。在机器人主体2进行校园巡逻时,机械头颅24上方的监控摄像头25保持同步监控,并将监控信息进行储存,同时,机器人主体2内部存储所有师生的人脸信息,当机器人主体2上方的监控摄像头25扫描到未记录的陌生人脸信息,将会发出报警声,并后台提醒学校工作人员,保证师生的安全,避免可疑人员进行校园。
35.机器人主体2在校园内部进行巡逻时,在遇到学生时,学生可以将书包等重物放入机器人主体2上的机械夹爪217中,机器人主体2可以通过内置的机械驱动机构控制机械胳膊27、机械手臂28以及机械小臂210模拟人类手臂运动,以第一轴杆29以及第二轴杆211为
转动基点转动从而实现对人类手臂工作的模拟,当机械小臂210调整到合适高度之后,带动机械掌212也同步到达合适高度,机械掌212的上方固定连接有第二红外监控机构213,第二红外监控机构213同步发出红外信号,通过红外信号反馈感知机械掌212距离学生的距离,避免机械掌212离学生距离过近,对学生造成损伤的问题;同时,机械泵214工作,带动连接桥215运动,承接块216带动两组机械夹爪217进行夹持合拢,机械夹爪217继而对学生的书包等其他重物进行夹持,减轻学生的负担,也增加学生的校园乐趣。
36.为了方便理解本发明的上述技术方案,以下就本发明在实际过程中的工作原理或者操作方式进行详细说明:
37.工作原理:在使用时,机器人主体2通过行进机构1上的前进轮12进行运动,实现机器人主体2的整体运动,在机器人主体2进行前进时,行进机构1上的第一红外监控机构14以及机器人主体2上的第三红外监控机构23同时发出红外线信号,红外信号感知机器人主体2离障碍物或者车辆之间的距离,通过发射出的红外信号反馈给第一红外监控机构14障碍物距离,行进机构1从而控制前进轮12的刹停,从而实现对机器人主体2的精准避障。
38.同时,机器人主体2在校园内部进行巡逻时,在遇到学生时,学生可以将书包等重物放入机器人主体2上的机械夹爪217中,机器人主体2可以通过内置的机械驱动机构控制机械胳膊27、机械手臂28以及机械小臂210模拟人类手臂运动,以第一轴杆29以及第二轴杆211为转动基点转动从而实现对人类手臂工作的模拟,当机械小臂210调整到合适高度之后,带动机械掌212也同步到达合适高度,机械掌212的上方固定连接有第二红外监控机构213,第二红外监控机构213同步发出红外信号,通过红外信号反馈感知机械掌212距离学生的距离,避免机械掌212离学生距离过近,对学生造成损伤的问题;同时,机械泵214工作,带动连接桥215运动,承接块216带动两组机械夹爪217进行夹持合拢,机械夹爪217继而对学生的书包等其他重物进行夹持,减轻学生的负担,也增加学生的校园乐趣。
39.在机器人主体2进行校园巡逻时,机械头颅24上方的监控摄像头25保持同步监控,并将监控信息进行储存,同时,机器人主体2内部存储所有师生的人脸信息,当机器人主体2上方的监控摄像头25扫描到未记录的陌生人脸信息,将会发出报警声,并后台提醒学校工作人员,保证师生的安全,避免可疑人员进行校园。
40.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1