一种用于手部外骨骼的套索传动装置
1.本发明涉及可穿戴式手部外骨骼技术领域,具体涉及一种用于手部外骨骼的套索传动装置。
背景技术:
2.可穿戴式手部外骨骼既能用于健康人手的力量增强,也能辅助手功能障碍患者进行康复训练,是提高人与外界环境交互能力的重要工具之一。
3.为了高效地完成日常抓取任务,设计手部外骨骼时需要在其结构和功能之间寻找平衡点,即如何以更简单的结构实现更复杂的功能。现有的手部外骨骼往往重功能而轻结构,普遍存在控制系统复杂、体积和重量大、便携性差等问题,导致实用性不高。在中国发明专利cn201910672628.9中提出一种外骨骼手指康复训练装置及其使用方法,每根手指都需要一个电机独立驱动来完成康复训练,当多手指同步运动时控制难度陡增;在中国发明专利cn202111528220.8中提出一种智能手指外骨骼机构,每根手指需要两个电机共同驱动,过多的电机不仅提升了控制难度,还增加了设备体积和重量。另外,上述两种手部外骨骼将驱动电机就近布置在手背或者手指上,便携性较差,影响使用者操作自如感。
技术实现要素:
4.为了克服现有技术的缺点,本发明的目的在于提供一种用于手部外骨骼的套索传动装置,仅用两个驱动电机就能实现五个手指自由度的稳定输出,并且输出力大小可调,具有控制简单、体积小、重量轻、便携性强等优点。
5.为了达到上述目的,本发明采取的技术方案是:
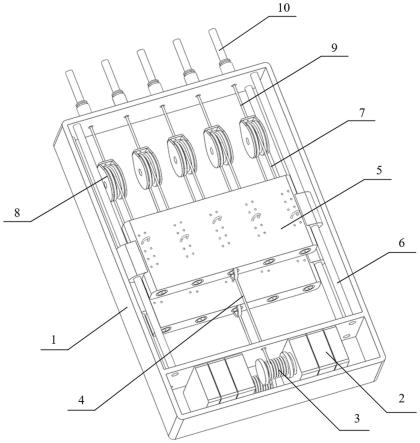
6.一种用于手部外骨骼的套索传动装置,包括控制盒1,控制盒1的一端固定有两个电机2,每一个电机2的输出轴上连接有一个绕线盘3,绕线盘3上缠绕有输入绳索4,输入绳索4另一端和一个弹簧滑块机构5输入端连接;所有弹簧滑块机构5两侧连接在直线导轨6上,弹簧滑块机构5能够在直线导轨6上自由滑动,直线导轨6对称固定在控制盒1的两侧;所述弹簧滑块机构5输出端设有五个支路,每个支路通过一个中间绳索7和一个动滑轮机构8连接;动滑轮机构8和输出绳索9相连,输出绳索9穿过输出绳套管10和相应的手指执行机构相连,输出绳套管10连接在控制盒1的另一端外侧。
7.所述的弹簧滑块机构5包括滑块501、压缩弹簧502和刚度调节卡扣503;滑块501内部均匀分布着五个圆柱形空腔,圆柱形空腔内设有压缩弹簧502,压缩弹簧502的一端和圆柱形空腔内部相连,另一端和沿轴向从圆柱形空腔中间穿过的中间绳索7相连;滑块501表面有沿圆柱形空腔径向分布的小孔,小孔安装有刚度调节卡扣503,刚度调节卡扣503和压缩弹簧502配合实现刚度调节。
8.所述的刚度调节卡扣503限制并改变压缩弹簧502的有效工作长度,进而改变压缩弹簧502刚度和相应输出绳索9在张紧状态下的输出力。
9.所述的压缩弹簧502根据实际需求设置不同的刚度,进而提供不同的输出力来驱
动相应的手指执行机构,实现物体稳定抓取。
10.所述的动滑轮机构8包括滑轮外壳802及其内部安装的动滑轮801,动滑轮801通过中间绳索7和弹簧滑块机构5连接,滑轮外壳802和输出绳索9连接。
11.电机2带动绕线盘3转动,使输入绳索4带动弹簧滑块机构5沿着直线导轨6产生滑移,接着压缩弹簧502开始压缩,使得中间绳索7张紧并产生拉力,进而带动动滑轮机构8、输出绳索9和潜在的手指执行机构产生运动;在手指执行机构未接触到所抓物体之前,所有输出绳索9均正常移动;当其中一个或多个手指执行机构接触到所抓物体时,相应的输出绳索9无法正常移动,使相应的压缩弹簧502进一步压缩变形,此时,弹簧滑块机构5整体仍沿直线导轨6滑移并带动其余输出绳索9和相应的手指执行机构正常运动,直到所有手指执行机构都和所抓物体接触完成抓取任务。
12.所述的一种用于手部外骨骼的套索传动装置远距离布置在用户腰间或者后背。
13.本发明的有益效果为:
14.1、本发明基于欠驱动理念设计而成,仅以两个电机作为驱动就能实现五个自由度的稳定输出,减轻设备整体重量的同时降低了控制难度,可用于控制手部外骨骼等康复设备。
15.2、本发明基于人手抓取物体时的力协同理论设计而成,是一种力协同的机械实现形式,通过调节压缩弹簧的刚度,当电机按设定模式驱动手部外骨骼运动时,各个手指能输出类人的抓握力,实现物体的稳定抓取。
16.3、本发明采用套索传动设计,整体结构简单紧凑、便携性强,不需要靠近手部外骨骼也能实现控制目标,可远程布置在用户腰间或者后背,既节省了空间也不影响操作自如感。
17.4、本发明融入模块化设计理念,以弹簧滑块机构作为基本功能模块,其整体输出自由度可根据实际控制需求进行相应调整,具备良好的可拓展性。
附图说明
18.图1为本发明实施例的结构示意图。
19.图2为本发明弹簧滑块机构示意图,其中(a)为弹簧滑块机构轴测图;(b)为弹簧滑块机构内部结构示意图。
20.图3为本发明动滑轮机构示意图。
具体实施方式
21.下面结合附图和实施例对本发明作详细描述。
22.参照图1,一种用于手部外骨骼的套索传动装置,包括控制盒1,控制盒1的一端固定有两个相对设置的电机2,每一个电机2的输出轴上连接有一个绕线盘3,绕线盘3上缠绕有输入绳索4,输入绳索4另一端和一个弹簧滑块机构5输入端连接;所有弹簧滑块机构5两侧连接在直线导轨6上,弹簧滑块机构5能够在直线导轨6上自由滑动,直线导轨6对称固定在控制盒1的两侧;弹簧滑块机构5输出端设有五个支路,每个支路通过一个中间绳索7和一个动滑轮机构8连接;动滑轮机构8和输出绳索9相连,输出绳索9穿过输出绳套管10和相应的手指执行机构相连,输出绳套管10连接在控制盒1的另一端外侧。
23.参照图2,所述的弹簧滑块机构5包括滑块501、压缩弹簧502和刚度调节卡扣503;滑块501内部均匀分布着五个圆柱形空腔,圆柱形空腔内设有压缩弹簧502,压缩弹簧502的一端和圆柱形空腔内部相连,另一端和沿轴向从圆柱形空腔中间穿过的中间绳索7相连;滑块501表面有沿圆柱形空腔径向分布的小孔,小孔安装有刚度调节卡扣503,刚度调节卡扣503可以限制并改变压缩弹簧502的有效工作长度,进而改变其刚度和相应输出绳索9在张紧状态下的输出力;压缩弹簧502可以根据实际需求设置不同的刚度,进而提供不同的输出力来驱动相应的手指执行机构,实现物体稳定抓取。
24.本发明的工作原理为:输入绳索4、中间绳索7、输出绳索9只能提供拉力,且在张紧状态下的弹性变形均可忽略不计,电机2带动绕线盘3转动,迫使输入绳索4张紧且其有效长度开始变短,输入绳索4带动弹簧滑块机构5沿着直线导轨6产生滑移,接着压缩弹簧502开始压缩,使得中间绳索7张紧并产生拉力,进而带动动滑轮机构8、输出绳索9和潜在的手指执行机构产生运动。在手指执行机构未接触到所抓物体之前,所有输出绳索9均可正常移动;当其中一个或多个手指执行机构接触到所抓物体时,相应的输出绳索9无法正常移动,迫使相应的压缩弹簧502进一步压缩变形,此时,弹簧滑块机构5整体仍可沿直线导轨6滑移并带动其余输出绳索9和相应的手指执行机构正常运动,直到所有手指执行机构都和所抓物体充分接触并完成抓取任务。
25.参照图3,所述的动滑轮机构8包括滑轮外壳802及其内部安装的动滑轮801,动滑轮801通过中间绳索7和弹簧滑块机构5连接,滑轮外壳802和输出绳索9连接。
26.以上实施例只为说明本发明的技术构思和特点,并不能以此限制本发明的保护范围。对于本领域的技术人员来说,凡是根据本发明精神实质所做的等效变换或修饰改进,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1