一种航空控制盒操作机械手及其操作方法与流程
1.本发明涉及航空机载控制盒测试技术领域,具体为一种航空控制盒操作机械手及其操作方法。
背景技术:
2.航空机载控制盒一般安装在驾驶舱内,为航空设备与其驾驶人员提供人机交互操纵界面。为适应机载设备多种状态和功能,控制盒上设计有多种按钮、旋钮、拨段开关等多种控制器件。在航空机械控制盒功能测试过程中更需要对这些控制器件进行交互操纵,为实现航空控制盒的自动测试,需要通过程控方式用机械手臂和前段的机械装置实现多种操作。
3.中国专利cn201822215486.7《一种全自动出炉机械手》公开了一种用于密闭式电石炉冶炼过程中,用于烧眼、开眼、扩眼、堵眼动作的装置。该装置完成的烧眼、开眼、扩眼、堵眼机械手完成的操作基本一致,不涉及本专利所述的多工作操作。其主要优势在于减低冶炼烧眼、开眼等工作的劳动强度,但其与本发明应用领域和有益效果不同。
4.中国专利cn202011108494.7《一种汽车电子换挡器档位检测系统及检测方法》公开了一种汽车电子换挡器档位检测系统,包括了用于移动换挡杆实现换挡杆角度和力值自动测试。但该发明中所述机械臂只实现换挡杆一种操作器件的线性运动。
5.南京理工大学学报第41卷第5期2017年10月发表的《一种基于视觉识别的按钮自主操作机械手》公开了一种按钮自主操作机械手,可通过程控信号实现按钮的按压动作,但未提及同意机械手在程控信号控制下可完成拨动、旋转等其他动作。因此,无法实现多种操作。
技术实现要素:
6.为了解决上述技术问题,本发明提出了一种航空控制盒操作机械手及其操作方法。
7.本发明所要解决的技术问题采用以下技术方案来实现:
8.一种航空控制盒操作机械手,包括:
9.基座,所述基座用于提供安装和操作基础,同时为机械手的供电线路和通讯线路提供固定位置;
10.程控模块,所述程控模块设置在所述基座上,用于接收外界上位机发送的控制信号驱使机械手上的各驱动电路动作;
11.机械臂,所述机械臂设置在所述基座上,用于受所述程控模块控制在三维空间内实现三个轴向和三个转动方向的运动,完成对被动作对象的定位;
12.可开合前爪,设置在所述机械臂的末端部,用于配合所述机械臂完成对航空控制盒上各种控制器件的多种操作动作;
13.开合机构,所述开合机构设置在所述机械臂的末端部且与所述可开合前爪连接,
用于控制所述可开合前爪的闭合与张开;
14.转动机构,所述转动机构设置在所述机械臂的末端部且与所述开合机构固定连接,用于带动所述开合机构及可开合前爪同步旋转。
15.优选的,所述转动机构带动所述开合机构及可开合前爪旋转的转动范围为0
°
至360
°
。
16.优选的,所述转动机构包括设置在所述机械臂末端部的伺服电机、与所述伺服电机同轴连接的驱动齿轮、与所述驱动齿轮啮合的内齿圈,所述内齿圈与所述开合机构同轴固定连接。
17.优选的,所述开合机构包括与所述内齿圈同轴固定连接的作动器、与所述作动器连接的连杆,所述连杆与所述可开合前爪连接。
18.优选的,所述可开合前爪呈同轴对称两爪式结构,爪型呈长方形结构,内壁呈中间为弧形两边为直线形结构。
19.优选的,所述可开合前爪具有完全闭合状态、半张开状态、完全张开状态。
20.优选的,所述可开合前爪在完全闭合状态下两爪呈中空的矩形结构,在半张开状态下两爪呈带有对称槽的圆形结构。
21.一种航空控制盒操作机械手的操作方法,利用一种航空控制盒操作机械手,包括航空控制盒的按钮按压操作、扭子开关拨动操作以及旋转、拨段开关转动操作,其中,按钮按压操作具体过程如下:
22.(一)开合机构控制可开合前爪在闭合状态;
23.(二)机械臂按照外界的上位机发送的位置坐标信号控制机械臂末端到被操作按钮正上方;
24.(三)转动机构按照外界的上位机发送的角度信号使可开合前爪对正被操作按钮;
25.(四)机械臂前伸对航空控制盒的按钮实施按压,机械臂前段压力传感器反馈压力信号到外界的上位机上,达到设定压力值时,机械臂停止前伸完成按压动作。
26.优选的,扭子开关拨动操作具体过程如下:
27.(a)开合机构控制可开合前爪在设定好的中间开度,机械臂按照外界的上位机发送的位置坐标信号,控制机械臂末端到被操作扭子开关正上方;
28.(b)机械臂、转动机构按照外界的上位机发送的位置信号、角度信号控制可开合前爪套住扭子开关拨动杆,机械臂按外界的上位机控制信号在拨动杆运动方向线性运动至设定的距离,完成开关接通、断开操作。
29.优选的,旋转、拨段开关转动操作具体过程如下:
30.(a)开合机构控制可开合前爪在全开位置,机械臂按照外界的上位机发送的位置坐标信号,控制机械臂末端到被操作旋钮、拨段开关上方;
31.(b)机械臂控制可开合前爪伸出,开合机构控制可开合前爪闭合,机械臂前段压力传感器反馈压力信号到外界的上位机上,达到设定压力值时可开合前爪停止闭合并保持,实现夹住旋钮、拨段开关钮帽的操作;
32.(c)转动机构按照外界的上位机信号转动设定的角度值完成旋钮、拨段开关对应位置的转动操作。
33.本发明的有益效果是:
34.与现有技术相比,
35.1)本发明基于机械臂通过伺服电机、前爪开合机构、转动机构和可开合前爪设计,通过以上部分的动作和结构组合,实现了对航空控制盒上各种按钮,扭子开关、拨段开关,旋钮的各种操作动作,便于控制全流程自动测试的实现。
36.2)本发明避免了为适应多种操作,需要分别设计多种机械臂操作前爪的情况,精简了设备结构,降低了成本。
37.3)本发明拓展了机械手的功能,解决了现有设备需要通过前爪切换实现多种动作的现状,提高了操作效率。
附图说明
38.下面结合附图和实施例对本发明进一步说明:
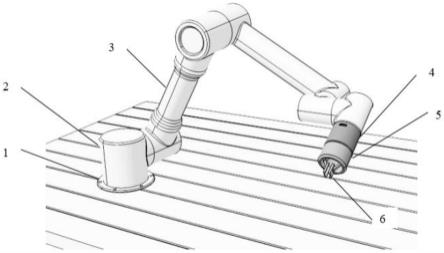
39.图1为本发明中机械手的结构示意图;
40.图2为本发明中转动机构、开合机构及可开合前爪的连接结构示意图;
41.图3为本发明中机械手按压操作示意图;
42.图4为本发明中机械手拨动操作示意图;
43.图5为本发明中机械手旋转操作示意图。
44.图中:1、基座;2、程控模块;3、机械臂;4、转动机构;5、开合机构;6、可开合前爪;7、伺服电机;8、驱动齿轮;9、内齿圈;10、作动器;11、连杆。
具体实施方式
45.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合附图以及实施例对本发明进一步阐述。
46.如图1至图2所示,一种航空控制盒操作机械手,包括基座1、程控模块2、机械臂3、转动机构4、开合机构5、可开合前爪6。
47.具体的,所述基座1用于提供稳固的机械臂3安装和操作基础,同时为机械手的供电线路和通讯线路提供固定位置。
48.所述程控模块2设置在所述基座1上,用于接收外界上位机发送的控制信号驱使机械手上的各驱动电路动作。
49.所述机械臂3设置在所述基座1上,用于受所述程控模块2控制在三维空间内实现三个轴向和三个转动方向的运动,完成对被动作对象的定位。
50.所述转动机构4设置在所述机械臂3的末端部且与所述开合机构5固定连接,用于带动所述开合机构5及可开合前爪6同步旋转,能够在0
°
至360
°
范围内驱动可开合前爪6转动,实现对旋转操作器件各个角度位置的匹配。
51.所述开合机构5设置在所述机械臂3的末端部且与所述可开合前爪6连接,用于控制所述可开合前爪6的闭合与张开。所述开合机构5控制所述可开合前爪6的两爪之间的距离,使所述可开合前爪6在闭合状态用于按钮按压,半开状态用于扭子开关拨动操作,全开状态用于旋钮、拨段开关转动,通过控制两爪开度适应不同尺寸的拨段开关和旋钮。
52.所述可开合前爪6设置在所述机械臂3的末端部,用于配合所述机械臂3完成对航空控制盒上各种控制器件的多种操作动作。
53.作为本实施例的进一步改进,所述转动机构4由伺服电机7、驱动齿轮8、内齿圈9组成;所述伺服电机7与所述驱动齿轮8连接,所述驱动齿轮8与所述内齿圈9啮合,所述转动机构4和开合机构5固定连接。所述伺服电机7转动时通过驱动齿轮8、内齿圈9的传动实现可开合前爪6的同轴转动。
54.作为本实施例的进一步改进,所述开合机构5由作动器10、连杆11组成;所述可开合前爪6通过连杆11与所述作动器10活动连接,通过作动器10的动作可实现所述可开合前爪6的闭合与张开。
55.作为本实施例的进一步改进,所述可开合前爪6设计为同轴对称两爪式结构,爪型采用长方形结构,内壁呈中间为弧形两边为直线形结构,通过连杆11与所述开合机构5连接。
56.再进一步地,所述可开合前爪6在两爪完全闭合时呈中空的矩形结构,可完成按压同时可满足带指示灯按钮的透光需求;两爪半开状态时呈带有对称槽的圆形结构,可与拨段开关完全重合,实现拨段开关较大旋转力矩的稳固操作。
57.一种航空控制盒操作机械手的操作方法,利用上述的一种航空控制盒操作机械手,来完成航空控制盒的按钮按压操作、扭子开关拨动操作以及旋转、拨段开关转动操作。其中,如图3所示,按钮按压操作具体过程如下:
58.开合机构5控制可开合前爪6在闭合状态;机械臂3按照外界的上位机发送的位置坐标信号控制机械臂3末端到被操作按钮正上方;转动机构4按照外界的上位机发送的角度信号使可开合前爪6对正被操作按钮;机械臂3前伸对航空控制盒的按钮实施按压,机械臂3前段压力传感器反馈压力信号到外界的上位机上,达到设定压力值时,机械臂3停止前伸完成按压动作。
59.如图4所示,扭子开关拨动操作具体过程如下:
60.开合机构5控制可开合前爪6在设定好的中间开度,机械臂3按照外界的上位机发送的位置坐标信号,控制机械臂3末端到被操作扭子开关正上方;机械臂3、转动机构4按照外界的上位机发送的位置信号、角度信号控制可开合前爪6套住扭子开关拨动杆,机械臂3按外界的上位机控制信号在拨动杆运动方向线性运动至设定的距离,完成开关接通、断开操作。
61.如图5所示,旋转、拨段开关转动操作具体过程如下:
62.开合机构5控制可开合前爪6在全开位置,机械臂3按照外界的上位机发送的位置坐标信号,控制机械臂3末端到被操作旋钮、拨段开关上方;机械臂3控制可开合前爪6伸出,开合机构5控制可开合前爪6闭合,机械臂3前段压力传感器反馈压力信号到外界的上位机上,达到设定压力值时可开合前爪6停止闭合并保持,实现夹住旋钮、拨段开关钮帽的操作;转动机构4按照外界的上位机信号转动设定的角度值完成旋钮、拨段开关对应位置的转动操作。
63.与现有技术相比,本发明基于机械臂通过伺服电机、前爪开合机构、转动机构和可开合前爪设计,通过以上部分的动作和结构组合,实现了对航空控制盒上各种按钮,扭子开关、拨段开关,旋钮的各种操作动作,便于控制全流程自动测试的实现。本发明避免了为适应多种操作,需要分别设计多种机械臂操作前爪的情况,精简了设备结构,降低了成本。本发明拓展了机械手的功能,解决了现有设备需要通过前爪切换实现多种动作的现状,提高
了操作效率。
64.以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1