一种用于辅助作业的可穿戴机器人及控制方法与流程
1.本发明涉及可穿戴机器人技术领域,具体是一种用于辅助作业的外肢体机器人。
背景技术:
2.外肢体机器人是指可以通过穿戴方式固定于人体并能协助人体完成一定任务的机器人,是一种新型的可穿戴机器人。与外骨骼机器人和假肢不同,可穿戴机器人是对人类肢体的拓展,通过机械肢体与人类肢体的对接融合、互助协作来提升人体的活动、感知和操作等能力。可穿戴机器人与原有肢体不存在绑缚关系,相当于人体额外肢体,可以帮助人体完成很多仅通过原有肢体无法完成的任务,在工业生产、医疗康复、助老助残及生活服务等领域都有着广阔的应用前景。例如,在飞机装配天花板过程中,使用外肢体辅助安装天花板,可以代替传统的双人协作安装方法,减少人力成本。然而,在使用外肢体用于辅助作业任务中,也存在着一些问题,不同操作人员的身高尺寸是不相同的,而且不同工作场景的工作高度也存在差异。
3.经对现有技术文献的检所发现:
4.中国专利(申请号202023121159.9):一种可伸缩的仿生外肢体机械臂。该专利主要提供了一种可以进行伸缩的仿生外肢体机械臂,基于仿生理念,参考人体手臂模型配置其自由度与构型,并引入了伸缩自由度,不影响灵巧性的基础上增加了作业空间。然而该外肢体机械臂只具有一个伸缩关节,且伸缩前后自由度没有发生改变;在非工作状态下,占用空间较大,并且其外肢体模块设计为整体结构,不易拆卸。
5.中国专利(申请号202023121258.7):一种具有流线型外壳的可折叠伸缩外肢体机械臂,该机械臂由伸缩模块和多个旋转模块组成,伸缩模块可进行二级伸缩,增加了作业空间;旋转模块可进行折叠,使外肢体机械臂在非工作状态下结构紧凑。但是其模块之间无法进行伸缩,且其伸缩功能通过舵机来实现主动收缩,伸缩前后自由度未发生改变。
6.故需要一种新的技术方案以解决上述技术问题。
技术实现要素:
7.针对以上问题,本发明提供了一种用于辅助作业的可穿戴机器人及控制方法,可以根据穿戴人员的身高尺寸和工作场景的不同改变可穿戴机器人自身的结构,适应不同的工作环境。
8.为实现上述目标功能,本发明用于辅助作业的可穿戴机器人控制方法采用如下技术方案:
9.一种用于辅助作业的可穿戴机器人控制方法,该机器人包括可穿戴辅具及连接于可穿戴辅具上端的变自由度机械臂;变自由度机械臂包括肩部模块、肘部模块、腕部模块、末端执行模块;肩部模块包括安装在穿戴辅具顶部的肩部驱动单元及安装于肩部驱动单元上的肩部薄壁连杆;所述肩部薄壁连杆内部设有空腔且该空腔底部设有第一薄膜压力传感器;肘部模块包括肘部驱动单元及安装于肘部驱动单元上的肘部薄壁连杆,肘部薄壁连杆
内部设有空腔且该空腔底部设有第二薄膜压力传感器;腕部模块包括腕部驱动单元及腕部连杆,末端执行模块安装于腕部连杆前端;所述肘部模块位于肩部薄壁连杆内部并可相对肩部薄壁连杆伸缩;腕部模块位于肘部薄壁连杆内部并可相对肘部薄壁连杆伸缩;
10.该方法包括以下步骤:
11.(1)操作人员与可穿戴机器人建立通信连接,并发送任务开始信号;
12.(2)可穿戴机器人获取当前工作模式信息;根据第一薄膜压力传感器、第二薄膜压力传感器产生的信号,判断可穿戴机器人所进入的工作模式;可穿戴机器人具有4种工作模式;模式0为腕部模块收缩于肘部模块中并压迫第二薄膜压力传感器,肘部模块收缩于肩部模块中并压迫第一薄膜压力传感器,机械臂自由度为4;模式1为腕部模块延伸出肘部模块;肘部模块收缩于肩部模块中,机械臂自由度为5;模式2为腕部模块收缩于肘部模块中,肘部模块延伸出肩部模块,机械臂自由度为5;模式3为腕部模块延伸出肘部模块,肘部模块延伸出肩部模块,机械臂自由度为6;
13.(3)获取工作场景到人体头部的位置信息;
14.(4)根据所述的位置信息判断工作场景是否处于当前工作模式的范围内;
15.(5)若所述的位置信息不处于当前工作模式的范围内,根据位置信息选择合适的工作模式;
16.(6)可穿戴机器人向操作人员发送工作模式信息,操作人员根据工作模式信息调整构型;
17.(7)操作人员发送任务结束信号,可穿戴机器人接收信号后重新获取调整后的工作模式信息。
18.进一步的,还包括视觉模块、运动和手势识别模块、力感知模块、惯性传导元件;所述的可穿戴机器人的控制方式为:通过视觉模块获取工作场景到人体头部的位置信息,通过坐标转换,计算目标位置相对机器人基座的位置信息;通过运动和手势识别模块获取操作人员手臂的运动信息,用以控制可穿戴机器人开始运行以及停止运行;末端执行器与目标位置接触后,力感知模块获取机器人末端的反馈力,以使可穿戴机器人在用于辅助作业过程中保持稳定的末端位置;通过可穿戴辅具上的惯性传导元件检测机器人基座的扰动,用以补偿可穿戴机器人的运动。
19.进一步的,所述的可穿戴机器人末端位置的稳定控制,基于具有人体扰动项的导纳控制模型实现,具体数学公式如下:
[0020][0021]
δf=f
f-fd[0022]
ax=x
f-xd[0023]
其中mk为可穿戴机器人的惯性参数,bk为阻尼参数,kz为刚度参数,三者的数值随着可穿戴机器人的模式改变而变化;δx为实际位置与期望位置之差,为实际速度与期望速度之差,为实际加速度与期望加速度之差,δf为末端实际反馈力与末端期望作用力之差;δd为人体扰动项,由可穿戴辅具上的惯性传导元件检测;ff为末端执行器实际反馈力,由辅助支撑装置中的力感知模块测量,fd为末端执行器期望作用力,其数值根据工作环境确定,并且按照操作人员意图进行调节;xf为末端执行器的实际位置,由驱动单元返回的角度信息结算获取,xd为末端执行器的期望位置,通过上述公式计算获取。
[0024]
本发明同时提供一种用于辅助作业的可穿戴机器人的技术方案,包括可穿戴辅具、变自由度机械臂和传感检测模块;
[0025]
可穿戴辅具包括连接肩带、肩部底座、穿戴背包,连接肩带用以连接固定肩部底座,穿戴背包用以放置电源和控制器;
[0026]
变自由度机械臂包括肩部模块、肘部模块、腕部模块、末端执行模块;肩部模块包括安装在穿戴辅具顶部的肩部驱动单元及安装于肩部驱动单元上的肩部薄壁连杆;所述肩部薄壁连杆内部设有空腔且该空腔底部设有第一薄膜压力传感器;肘部模块包括肘部驱动单元及安装于肘部驱动单元上的肘部薄壁连杆,肘部薄壁连杆内部设有空腔且该空腔底部设有第二薄膜压力传感器;腕部模块包括腕部驱动单元及腕部连杆,末端执行模块安装于腕部连杆前端;所述肘部模块位于肩部薄壁连杆内部并可相对肩部薄壁连杆伸缩;腕部模块位于肘部薄壁连杆内部并可相对肘部薄壁连杆伸缩;肘部驱动单元的安装盘上开有四个向外延伸的凸棱,肩部薄壁连杆内壁设有对应的限位凹槽,肘部驱动单元沿薄壁连杆内部凹槽上下移动;腕部模块和末端执行模块的连接方式与肘部模块一致;
[0027]
传感检测模块包括力感知模块、视觉模块、惯性测量单元、运动和手势识别模块以及薄膜压力传感器。
[0028]
进一步的,所述的可穿戴机器人获取当前工作模式信息通过薄膜压力传感器实现,在肩部模块和肘部模块的薄壁连杆底部装有薄膜压力传感器,用以检测模块之间收缩与展开的状态,根据薄膜压力传感器产生的信号,判断可穿戴机器人所进入的工作模式;获取工作场景到人体头部的位置信息通过视觉模块完成,视觉模块穿戴于操作人员头部,测量工作场景到人体头部的位置信息;任务开始和结束信号,通过运动和手势识别模块完成,当检测到操作人员做出预设的开始手势或结束手势后,任务开始或结束。
[0029]
进一步的,肘部驱动单元包括舵机、舵机外壳和舵机安装盘,其中,舵机安装盘上的四个凸棱中有两个凸棱中装有金属探头,其余两个凸棱中装有磁铁;薄壁连杆内部的轨道上安装有电子线路和磁片;其中,凸棱中的磁铁与轨道内部的磁片相吸,用以进行限位;安装盘凸棱中的金属探头通过导线与薄壁连杆轨道中的电子线路连接,构成回路,驱动单元进行移动时,回路中的电阻值发生变化,通过控制器测量回路中电压的变化,从而计算出驱动单元在薄壁连杆中的位置。
[0030]
有益效果:
[0031]
本技术提供的一种用于辅助作业的可穿戴机器人,其变自由度机械臂由模块单元组成,模块单元易进行拆卸、更换和维护,并且模块单元之间可以进行收缩与展开,针对不同的人体身高尺寸和不同的工作场景,该可穿戴机器人具有多种模式进行切换,能够适应不同的工作高度。
[0032]
一种用于辅助作业的可穿戴机器人还具备结构自适应功能,可穿戴机器人通过穿戴于操作人员头部的视觉模块获取工作场景到人体头部的位置信息,可穿戴机器人根据位置信息选择相应的工作模式,操作人员获取工作模式信息后,调整可穿戴机器人构型,以适应当前的工作环境。
附图说明
[0033]
图1为操作者穿戴本发明可穿戴机器人的立体图。
[0034]
图2为可穿戴辅具示意图。
[0035]
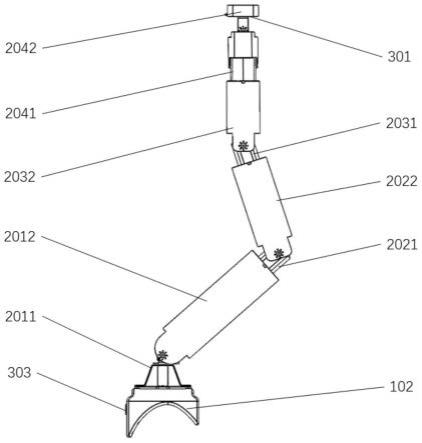
图3为变自由度机械臂示意图。
[0036]
图4为肘部模块爆炸图。
[0037]
图5为肩部薄壁连杆截面图。
[0038]
图6为可穿戴机器人工作模式。
[0039]
图7为结构自适应实施的流程图。
[0040]
图8为可穿戴机器人获取工作模式信息的流程图。
[0041]
图9为可穿戴机器人末端位置稳定控制的原理示意图。
[0042]
其中:可穿戴辅具1、变自由度机械臂2、传感检测模块3、连接肩带101、肩部底座102、穿戴背包103、肩部模块201、肘部模块202、腕部模块203、末端执行模块204、肩部驱动单元2011、肩部薄壁连杆2012、电子线路2012-1、磁片2012-2、肘部驱动单元2021、舵机2021-1、舵机外壳2021-2、滑片2021-3、磁铁2021-4、肘部薄壁连杆2022、腕部驱动单元2031、腕部薄壁连杆2032、末端驱动单元2041、辅助支撑装置2042、力感知模块301、视觉模块302、惯性测量单元303、运动和手势识别模块304以及薄膜压力传感器305。
具体实施方式
[0043]
下面对本发明的实施例作详细说明:
[0044]
如图1-5所示,一种用于辅助作业的可穿戴机器人,包括可穿戴辅具1、变自由度机械臂2和传感检测模块3。
[0045]
可穿戴辅具1穿戴于人体肩部,由连接肩带101、肩部底座102、穿戴背包103组成,连接肩带101用以连接固定肩部底座102,穿戴背包103用以放置电源和控制器;
[0046]
变自由度机械臂2由肩部模块201、肘部模块202、腕部模块203、末端执行模块204组成,肩部模块201、肘部模块202、腕部模块203由驱动单元和薄壁连杆组成;末端执行模块由驱动单元和辅助支撑装置2042组成,其中驱动单元与薄壁连杆上开有用以走线的孔槽。肩部驱动单元2011固定在肩部底座102上,其输出端与肩部薄壁连杆2012连接;肘部驱动单元2021的安装盘上开有四个向外延伸的凸棱,肩部薄壁连杆2012内壁设有对应的限位凹槽,驱动单元可沿薄壁连杆内部凹槽上下移动,实现模块之间的收缩和展开。腕部模块203和末端执行模块204的连接方式与肘部模块202的连接方式相同,腕部驱动单元2031与肘部薄壁连杆2022连接,末端驱动单元2041与腕部薄壁连杆2032连接。
[0047]
驱动单元由舵机2021-1、舵机外壳2021-2和舵机安装盘组成,其中,舵机安装盘上的四个凸棱中有两个凸棱中装有金属探头2021-3,其余两个凸棱中装有磁铁2021-4;薄壁连杆内部的轨道上安装有电子线路2012-1和磁片2012-2。其中,凸棱中的磁铁2021-4与轨道内部的磁片2012-2相吸,用以进行限位;安装盘凸棱中的金属探头2021-3通过导线与薄壁连杆轨道中的电子线路2012-1连接,构成回路,驱动单元进行移动时,回路中的电阻值会发生变化,可以通过控制器测量回路中电压的变化,从而计算出驱动单元在薄壁连杆中的位置。
[0048]
传感检测模块由力感知模块301、视觉模块302、惯性测量单元303、运动手势识别模块304以及薄膜压力传感器305组成。力感知模块301安装在辅助支撑装置2042的下方,用以检测用于辅助作业过程中工作场景施加给末端的力;视觉模块302佩戴于操作人员的头
部,用以获取工作场景到人体头部的位置信息;惯性测量单元303安装在肩部底座102上,测量操作人员在工作过程中的人体扰动;运动和手势识别模块304穿戴于操作人员小臂末端,用以检测操作人员的手臂运动和识别操作人员做出的手势;薄膜压力传感器305分别位于肩部薄壁连杆2012和肘部薄壁连杆2022的底部,用以检测驱动单元是否收缩到薄壁连杆底部。
[0049]
可穿戴机器人具有4种工作模式,如图6所示从左到右分别是模式0、模式1、模式2、模式3。可穿戴机器人获取工作模式信息的流程如图8所示,根据肩部模块201和肘部模块202中的薄膜压力传感器305是否产生信号,来获取可穿戴机器人的工作模式信息。如果两个薄膜压力传感器305都产生信号,可穿戴机器人的工作模式为模式0,该模式下机械臂的自由度为4,拓扑结构为soc{r
⊥r⊥r⊥
r};若只有肩部模块单元201的薄膜压力传感器305产生信号,可穿戴机器人的工作模式为模式1,该模式下机械臂的自由度为5,拓扑结构为soc{r
⊥
r∥r
⊥r⊥
r};若只有肘部模块单元202的薄膜压力传感器305产生信号,可穿戴机器人的工作模式为模式2,该模式下机械臂的自由度为5,拓扑结构为soc{r
⊥
r∥r
⊥r⊥
r};若两个薄膜压力传感器305都没有产生信号,则机械臂没有进行收缩,可穿戴机器人的工作模式为模式4,该模式下机械臂的自由度为6,拓扑结构为soc{r
⊥
r∥r∥r
⊥r⊥
r}。
[0050]
可穿戴机器人在进行辅助工人进行过顶任务之前,需要根据工作场景以及操作人员的身高选择相应的模式,结构自适应的实施包括以下步骤:
[0051]
步骤1:操作人员与可穿戴机器人建立通信连接,并发送任务开始信号。本步骤中使用运动和手势识别模块304识别预设的操作人员手势,作为任务开始信号,例如,操作人员做出握拳手势时,任务开始;
[0052]
步骤2:可穿戴机器人获取当前工作模式信息。本步骤中,可穿戴机器人通过采集肩部模块201和肘部模块202中的薄膜压力传感器305信号,判断可穿戴机器人的工作模式,获取当前工作模式的工作范围信息;
[0053]
步骤3:获取工作场景到人体头部的位置信息。本步骤中,通过佩戴于操作人员头部的视觉模块302,获取工作场景到人体头部的位置信息;
[0054]
步骤4:根据所述的位置信息判断工作场景是否处于当前工作模式的范围内。本步骤中,将步骤2获得的工作范围信息与步骤3中获得的位置信息进行比较;
[0055]
步骤5:若所述的位置信息不处于工作范围内,根据位置信息选择合适的工作模式。本步骤中,将步骤3中获得的位置信息与其他3中模式的工作范围进行比较;
[0056]
步骤6:可穿戴机器人向操作人员发送工作模式信息,操作人员根据工作模式信息调整构型。本步骤中,操作人员通过视觉模块302的界面获得可穿戴机器人发送的模式信息,根据模式信息,调整模块之间的收缩与展开关系;
[0057]
步骤7:操作人员发送任务结束信号,可穿戴机器人获取调整后的工作模式信息,切换相应的可穿戴机器人构型。本步骤中使用运动和手势识别模块304识别操作人员的手势,作为任务结束信号,例如,操作人员做出张开手势时,任务结束。
[0058]
确定可穿戴机器人的构型后,对其控制方式为:通过视觉模块302获取工作场景到人体头部的位置信息,并通过坐标转换,计算目标位置相对机器人基座的位置信息;通过运动和手势识别模块304获取操作人员手臂的运动信息,用以控制可穿戴机器人开始运行以及停止运行,例如当操作人员手臂抬起时,可穿戴机器人运行到目标位置,操作人员放下手
臂时,可穿戴机器人回归到初始位置;通过辅助支撑装置2042中的力感知模块301用以获得机械臂末端的反馈力,当反馈力低于预设的阈值时,增大驱动单元的扭矩,当反馈力高于预设的阈值时,降低驱动单元的扭矩,预设的阈值根据实际过顶作业任务进行设定;通过可穿戴辅具1上的惯性传导元件303检测机器人基座的扰动,用以补偿可穿戴机器人的运动。
[0059]
所述的可穿戴机器人末端位置的稳定控制,基于具有人体扰动项的导纳控制模型实现,具体数学公式如下:
[0060][0061]
δf=f
f-fd[0062]
ax=x
f-xd[0063]
其中mk为可穿戴机器人的惯性参数,bk为阻尼参数,kz为刚度参数,三者的数值随着外肢体可穿戴机器人的模式改变而变化。δx为实际位置与期望位置之差,为实际速度与期望速度之差,为实际加速度与期望加速度之差,δf为末端实际反馈力与末端期望作用力之差。δd为人体扰动项,由可穿戴辅具1上的惯性传导元件303检测。ff为末端执行器实际反馈力,由辅助支撑装置2042中的力感知模块301测量,fd为末端执行器期望作用力,其数值根据工作环境确定,并且按照操作人员意图进行调节。xf为末端执行器的实际位置,由驱动单元返回的角度信息结算获取,xd为末端执行器的期望位置,通过上述公式计算获取。
[0064]
本发明具体实现的方法和途径很多,以上所述仅是本发明的优选实施方式。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改性,这些都是属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1