一种移动副驱动的可重构并联机器人
1.本发明涉及机器人技术领域,尤其是一种移动副驱动可重构并联机器人。
背景技术:
2.航空航天制造领域作为国家高端装备制造业的典型代表,其技术水平和生产能力是国家制造业实力和国防科技工业现代化水平的综合体现。随着大飞机、新一代运载火箭等典型构件的日益复杂及新材料的不断涌现,航空航天产品结构趋向复杂化、大型化,且其生产过程中可重复性工作较少,自动化程度较低。此外,航空航天产品还具有性能指标精度高、载荷重等特点。目前,用于加工航空航天产品的传统制造装备造价成本高且柔性较差,无法满足我国航空航天制造领域的生产需求。
3.工业机器人作为衡量国家制造业水平和自动化程度的重要标准,已逐步发展成为具有多功能、智能化和快速可重构等特征的作业单元,特别适用于航空航天制造领域大型复杂结构件现场局部原位加工及自动化装配等操作。然而,与传统制造业不同,航空航天产品多种类、小批量的生产特点还要求机器人具有良好的作业柔性和可扩展性。此外,现有的用于航空航天制造领域的并联机器人常以固定基座的模式用作机床,其可达工作空间较小、工作效率较低。因此,提出一种可实现大范围移动加工的可重构并联机器人,对实现航空航天制造领域大型复杂结构件高效加工至关重要。
技术实现要素:
4.发明目的:本发明的目的在于提供一种移动副驱动的可重构并联机器人,使得可重构并联机器人在移动副的带动下具有大面积移动范围,同时具有多种操作模式实现高效加工。
5.技术方案:本发明提供的一种移动副驱动的可重构并联机器人,包含机架、动平台,所述机架与动平台之间通过三条结构相同的运动支链相连,所述运动支链之间并联连接;每个运动支链均包含虎克铰、可锁球关节、移动副;运动支链通过虎克铰与动平台铰接,同时可锁球关节与移动副固定连接;所述可锁球关节包含三个结构相同的可锁转动副,可锁转动副互相正交连接;
6.所述机架包括x方向导轨和y方向导轨,x方向导轨与y方向导轨垂直交叉均匀分布,x方向导轨与y方向导轨顶面均设有沿各导轨延伸方向所延伸的齿条;
7.所述移动副包含正交布置的x方向电机与y方向电机,且x方向电机输出端装有x方向齿轮;y方向电机输出端装有y方向齿轮;x方向电机输出端轴线与y方向电机输出端轴线垂直,当x方向齿轮与x方向导轨的齿条啮合时,y方向齿轮悬空;当y方向齿轮与y方向导轨的齿条啮合时,x方向齿轮悬空;
8.所述x方向导轨与y方向导轨相交处为换向位置,该换向位置设置凹槽,凹槽将x方向导轨与y方向导轨截断,当移动副移动至该换向位置时,x方向齿轮与x方向导轨末端接触,同时y方向齿轮与y方向导轨末端接触。
9.进一步的,可锁球关节包含三个结构相同,且互相正交分布的可锁转动副,分别为第一可锁转动副、第二可锁转动副、第三可锁转动副,可锁转动副均包含电机、卡盘扳手、三爪卡盘,卡盘扳手的一端固定于三爪卡盘的齿轮方孔中,电机转动时带动卡盘扳手旋转,三爪卡盘同时趋近或离散,可锁转动副相应的处于锁住或释放状态。
10.进一步的,通过可锁转动副的不同状态带动三条运动支链,可重构并联机器人相应的具有三种操作模式,通过移动副与导轨内部齿条嵌合,可重构并联机器人相应的具有六种运动方式,即每种操作模式下均有六种运动方式。
11.进一步的,该机器人具有六种运动方式,设三条运动支链分别为第一运动支链、第二运动支链、第三运动支链,六种运动方式分别为:
12.三条运动支链均沿y方向导轨运动;
13.三条运动支链均沿x方向导轨运动;
14.第一运动支链沿x方向导轨运动,第二运动支链及第三运动支链均沿y方向导轨运动;
15.第一运动支链沿y方向导轨运动,第二运动支链及第三运动支链均沿x方向导轨运动;
16.第一运动支链及第三运动支链均沿y方向导轨运动,第二运动支链沿x方向导轨运动;
17.第一运动支链及第二运动支链均沿x方向导轨运动,第三运动支链沿y方向导轨运动。
18.进一步的,三种操作模式分别为:
19.(1)所有可锁转动副均处于释放状态,该可重构并联机器人具有六个自由度,无几何约束;
20.(2)锁住第一可锁转动副或第二可锁转动副,该可重构并联机器人具有3-prs并联机构形态,其中,p表示移动副驱动,r表示转动副,s表示球关节;
21.(3)锁住第三可锁转动副,该可重构并联机器人具有3-puu并联机构形态,其中,u表示虎克铰。
22.进一步的,所述x方向导轨在x方向导轨齿条两侧设有向下凹陷的x方向导槽,该x方向导槽的延伸方向与x方向导轨齿条延伸方向相同;y方向导轨在y方向导轨齿条两侧设有向下凹陷的y方向导槽,该y方向导槽的延伸方向与y方向导轨齿条延伸方向相同;所述移动副底部设有四个向下凸出的导块,四个导块之间形成十字形的间隙;移动副在x方向导轨上移动时,四个导块位于x方向导槽中,x方向导轨齿条位于十字形的间隙中;移动副在y方向导轨上移动时,四个导块位于y方向导槽中,y方向导轨齿条位于十字形的间隙中。
23.有益效果:本发明与现有技术相比,其显著特点是通过移动副驱动并联机器人在导轨任意x/y方向移动,使得并联机器人实现大范围移动,同时通过改变可锁转动副的不同状态,实现并联机器人在三种操作模式间切换,此时带动动平台平动或转动,使得机器人能够大范围内加工,提高了工作空间范围及工作效率。
附图说明
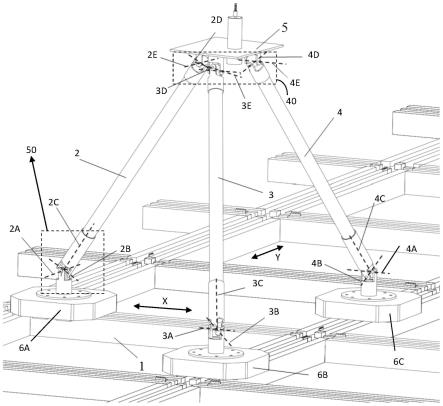
24.图1是本发明的结构示意图;
25.图2是本发明中移动副中x方向齿轮与x方向导轨齿条配合图;
26.图3是本发明中机架结构示意图;
27.图4是本发明中齿轮与齿条接触时的状态示意图;
28.图5是本发明中移动副结构示意图;
29.图6是本发明中六种运动方式示意图;
30.图7是本发明中可锁转动副结构示意图。
具体实施方式
31.下面结合附图对本发明做进一步的详细说明。
32.本发明提供的一种移动副驱动的可重构并联机器人,请参阅图1所示,包含机架1、动平台5,所述机架1与动平台5之间通过三条结构相同的运动支链相连,所述运动支链之间并联连接,分别为第一运动支链2、第二运动支链3、第三运动支链4;每个运动支链包含虎克铰40、可锁球关节50、移动副;运动支链通过虎克铰40与动平台5铰接,同时可锁球关节50与移动副固定连接。
33.请参阅图3所示,机架1包括x方向导轨和y方向导轨,x方向导轨与y方向导轨垂直交叉均匀分布,x方向导轨与y方向导轨顶面均设有沿各导轨延伸方向所延伸的齿条7。
34.请参阅图1所示,虎克铰40均包含两个正交布置的转动副,分别为上转动副、下转动副,上转动副与动平台5固定连接,下转动副与上转动副铰接,其中,第一运动支链2的虎克铰中,包含两条轴线,分别为第一轴线2d、第二轴线2e;第二运动支链3的虎克铰中,包含两条轴线,分别为第一轴线3d、第二轴线3e;第三运动支链4的虎克铰中,包含两条轴线,分别为第一轴线4d、第二轴线4e;第二轴线3e与第二轴线4e相互平行,且均与第二轴线2e互相垂直。
35.请参阅图1及图2并结合图5所示,移动副分别为第一移动副6a、第二移动副6b、第三移动副6c,以第一移动副6a为例,包含正交布置的x方向电机80与y方向电机81,且x方向电机80输出端装有x方向齿轮90;y方向电机输出端装有y方向齿轮91;x方向电机80输出端轴线与y方向电机81输出端轴线垂直,当x方向齿轮90与x方向导轨的齿条啮合时,y方向齿轮91悬空;当y方向齿轮91与y方向导轨的齿条啮合时,x方向齿轮90悬空。
36.请参阅图3及图4所示,x方向导轨与y方向导轨相交处为换向位置,该换向位置设置凹槽,凹槽将x方向导轨与y方向导轨截断,当移动副移动至该换向位置时,x方向齿轮与x方向导轨末端接触,同时y方向齿轮与y方向导轨末端接触。
37.请参阅图3及图4并结合图5所示,x方向导轨在x方向导轨齿条两侧设有向下凹陷的x方向导槽71,该x方向导槽71的延伸方向与x方向导轨齿条延伸方向相同;y方向导轨在y方向导轨齿条两侧设有向下凹陷的y方向导槽72,该y方向导槽72的延伸方向与y方向导轨齿条延伸方向相同;所述移动副底部设有四个向下凸出的导块73,四个导块73之间形成十字形的间隙;移动副在x方向导轨上移动时,四个导块73位于x方向导槽中,x方向导轨齿条位于十字形的间隙中;移动副在y方向导轨上移动时,四个导块位于y方向导槽中,y方向导轨齿条位于十字形的间隙中。
38.可锁球关节包含三个结构相同的可锁转动副,可锁转动副互相正交连接,分别为第一可锁转动副、第二可锁转动副、第三可锁转动副,可锁转动副均包含电机、卡盘扳手、三
爪卡盘,卡盘扳手的一端固定于三爪卡盘的齿轮方孔中,电机转动时带动卡盘扳手旋转,三爪卡盘同时趋近或离散,可锁转动副相应的处于锁住或释放状态。
39.请参阅图7所示,以第二运动支链3为例,第二运动支链3中的可锁球关节包含三个可锁转动副,分别为第一可锁转动副3a、第二可锁转动副3b、第三可锁转动副3c,其中,第三可锁转动副3c分别与第一可锁转动副3a、第二可锁转动副3b互相正交布置,且固定于运动支链内,以第一可锁转动副3a为例,第一可锁转动副3a中,包含电机10、卡盘扳手11、三爪卡盘12,卡盘扳手11的一端固定于三爪卡盘的齿轮方孔中,卡盘扳手11的另一端与电机10固定连接,电机10工作时带动卡盘扳手11旋转,三爪卡盘12同时趋近或离散,此时,第一可锁转动副3a相应的处于锁住或释放状态。
40.同理,第一运动支链2中的可锁球关节包含三个可锁转动副,分别为第一可锁转动副2a、第二可锁转动副2b、第三可锁转动副2c,第三可锁转动副2c分别与第一可锁转动副2a、第二可锁转动副2b互相正交布置,且固定于运动支链内;第三运动支链4中的可锁球关节包含三个可锁转动副,分别为第一可锁转动副4a、第二可锁转动副4b、第三可锁转动副4c,第三可锁转动副4c分别与第一可锁转动副4a、第二可锁转动副4b互相正交布置,且固定于运动支链内;同样均通过电机电动卡盘扳手旋转,进而使得三爪卡盘同时趋近或离散,可锁转动副相应的处于锁住或释放状态;同时,第一可锁转动副3a的轴线与第一可锁转动副4a的轴线互相平行,两者轴线均垂直于第一可锁转动副2a的轴线。
41.通过可锁转动副的不同状态带动三条运动支链,可重构并联机器人相应的具有三种操作模式,通过移动副与导轨内部齿条嵌合,可重构并联机器人相应的具有六种运动方式,即每种操作模式下均有六种运动方式。
42.因此,第二运动支链上的可锁球关节,根据可锁转动副的不同状态,实现第二运动支链的不同转向与运动及三种不同的操作模式,同理,第一运动支链与第三运动支链同样能够实现不同转向与运动及三种不同的操作模式,进而使得可重构并联机器人实现三种操作模式及六种运动方式。
43.请参阅图6所示,六种运动方式分别为:
44.三条运动支链均沿y方向导轨运动;
45.三条运动支链均沿x方向导轨运动;
46.第一运动支链沿x方向导轨运动,第二运动支链及第三运动支链均沿y方向导轨运动;
47.第一运动支链沿y方向导轨运动,第二运动支链及第三运动支链均沿x方向导轨运动;
48.第一运动支链及第三运动支链均沿y方向导轨运动,第二运动支链沿x方向导轨运动;
49.第一运动支链及第二运动支链均沿x方向导轨运动,第三运动支链沿y方向导轨运动。
50.三种操作模式分别为:
51.(1)所有可锁转动副均处于释放状态,该可重构并联机器人具有六个自由度,无几何约束。
52.(2)当同时锁住所有运动支链上的第一可锁转动副或第二可锁转动副,即第一可
锁转动副2a、第一可锁转动副3a、第一可锁转动副4a,或第二可锁转动副2b、第二可锁转动副3b、第二可锁转动副4b,处于锁住状态时,该可重构并联机器人具有3-prs并联机构形态,其中,p表示移动副驱动,r表示转动副,s表示球关节。
53.为方便区分,当第一可锁转动副2a、第一可锁转动副3a、第一可锁转动副4a处于锁住状态时,此时可重构并联机器人的模式称为3-prsa并联机构;当第二可锁转动副2b、第二可锁转动副3b、第二可锁转动副4b处于锁住状态时,此时可重构并联机器人的模式称为3-prsb并联机构。
54.(3)当同时锁住所有运动支链上的第三可锁转动副,及第三可锁转动副2c、第三可锁转动副3c、第三可锁转动副4c,均处于锁住状态,该可重构并联机器人具有3-puu并联机构形态,进而实现3t运动,其中,u表示虎克铰。
55.因此,可重构并联机器人有三种操作模式,且三种操作模式下均有六种运动方式,该可重构并联机器人的驱动副为各运动支链中的移动副,驱动方式为移动副中的电机驱动的齿轮齿条;进而带动该可重构并联机器人在多种操作模式及运动模式间切换,同时带动动平台实现转动和平动。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1