一种基于脑机接口的猴子下肢外骨骼系统及其控制方法与流程
本技术涉及外骨骼控制,特别是一种基于脑机接口的猴子下肢外骨骼系统及其控制方法。
背景技术:
1、脑机接口在运动神经康复等领域有着重要的发展潜力,通过探索脑机信号以及运动康复之间的关联,有助于为后续通过脑机接口信号帮助瘫痪人群实现自主运动,基于脑机接口信号重塑神经系统,基于脑机接口信号实现运动康复等研究领域奠定基础。
2、然而基于脑机接口技术的研究具有一定的风险,特别是侵入式的脑机接口存在更大的风险,因此在探索相关研究时更倾向于先从与人类相近的灵长类动物开始,例如exio-a brain-controlled lower limbexoskeleton for rhesus macaques提供了一种基于脑机接口的恒河猴下肢外骨骼系统。
3、但是,现有的猴子下肢外骨骼系统存在以下问题:不能调整尺寸;没有针对踝关节进行柔性设计;不支持四足步行步态;不支持落地行走;给猴子的固定方式不够牢靠。
技术实现思路
1、鉴于所述问题,提出了本技术以便提供克服所述问题或者至少部分地解决所述问题的一种基于脑机接口的猴子下肢外骨骼系统及其控制方法,包括:
2、一种基于脑机接口的猴子下肢外骨骼系统,包括:脑机接口设备和外骨骼设备;所述外骨骼设备包括背板结构、相对设置在所述背板结构左右两侧的腰部调节结构和与所述腰部调节结构连接的下肢驱动结构;
3、所述腰部调节结构包括用于调节两个所述下肢驱动结构间距的第一调节组件和用于调节所述下肢驱动结构与所述背板结构间距的第二调节组件;所述第一调节组件与所述背板结构的侧边连接;所述第二调节组件与所述第一调节组件的活动端连接;所述下肢驱动结构与所述第二调节组件的活动端连接;
4、所述下肢驱动结构包括电机组件设置在所述电机组件的输出端的传感器组件;所述背板结构包括用于控制所述电机组件转动的驱动器;所述脑机接口设备分别与所述传感器组件和所述驱动器无线连接;所述驱动器与所述电机组件电连接;
5、当猴子穿戴所述猴子下肢外骨骼系统时,所述脑机接口设备与所述猴子的脑部连接;所述背板结构对应于所述猴子的背部位置;所述下肢驱动结构对应于所述猴子的下肢位置,其中,所述电机组件对应于所述猴子的髋关节位置和膝关节位置。
6、优选的,所述背板结构包括背板壳体、开关按钮、急停按钮、接线插座和所述驱动器;所述开关按钮、所述急停按钮和所述接线插座分别设置在所述背板壳体的表面;所述驱动器设置在所述背板壳体的内部;所述开关按钮、所述急停按钮和所述接线插座分别与所述驱动器电连接;所述第一调节组件与所述背板壳体的侧边连接。
7、优选的,所述第一调节组件包括连接在所述背板结构侧边的第一导轨、滑动设置在所述第一导轨表面的第一滑块、固定在所述第一导轨远离所述背板结构的端部的第一挡块和用于锁紧所述第一滑块和所述第一导轨的第一紧固件;所述第一紧固件设置在所述第一滑块与所述第一导轨之间;所述第二调节组件包括连接在所述第一滑块侧边的第二导轨,滑动设置在所述第二导轨表面的第二滑块,固定在所述第二导轨远离所述第一滑块的端部的第二挡块、用于锁紧所述第二滑块和所述第二导轨的第二紧固件和固定在所述第二滑块侧边的减震模块;所述第二紧固件设置在所述第二滑块与所述第二导轨之间。
8、优选的,所述下肢驱动结构包括与所述第二调节组件活动端连接的髋关节动力组件、与所述髋关节动力组件转动连接的大腿组件、与所述大腿组件转动连接的小腿组件和与所述小腿组件转动连接的脚部组件;所述髋关节动力组件包括髋关节电机;所述大腿组件包括膝关节电机;所述髋关节电机和所述膝关节电机分别与所述驱动器电连接。
9、优选的,所述髋关节动力组件包括与所述第二调节组件活动端连接的髋关节摆臂、固定在所述髋关节摆臂远离所述第二调节组件的端部的所述髋关节电机和固定在所述髋关节电机侧边的髋部限位块;所述大腿组件与所述髋关节电机的输出端连接;
10、所述大腿组件包括与所述髋关节电机的输出端连接的大腿连接筒、固定在所述大腿连接筒远离所述髋关节电机的端部的所述膝关节电机、固定在所述大腿连接筒侧边的大腿支撑杆和固定在所述大腿支撑杆远离所述大腿连接筒的端部的大腿挡板;所述小腿组件与所述膝关节电机的输出端连接;
11、所述小腿组件包括与所述膝关节电机的输出端连接的膝关节摆臂、固定在所述膝关节摆臂侧边的小腿挡板、固定在所述膝关节摆臂侧边的绑带夹座和固定在所述膝关节摆臂远离所述膝关节电机的端部的踝关节转动座;所述脚部组件与所述踝关节转动座转动连接;
12、所述脚部组件包括踝关节转轴和与所述踝关节转轴连接的硅胶垫板;所述踝关节转轴与所述踝关节转动座转动连接。
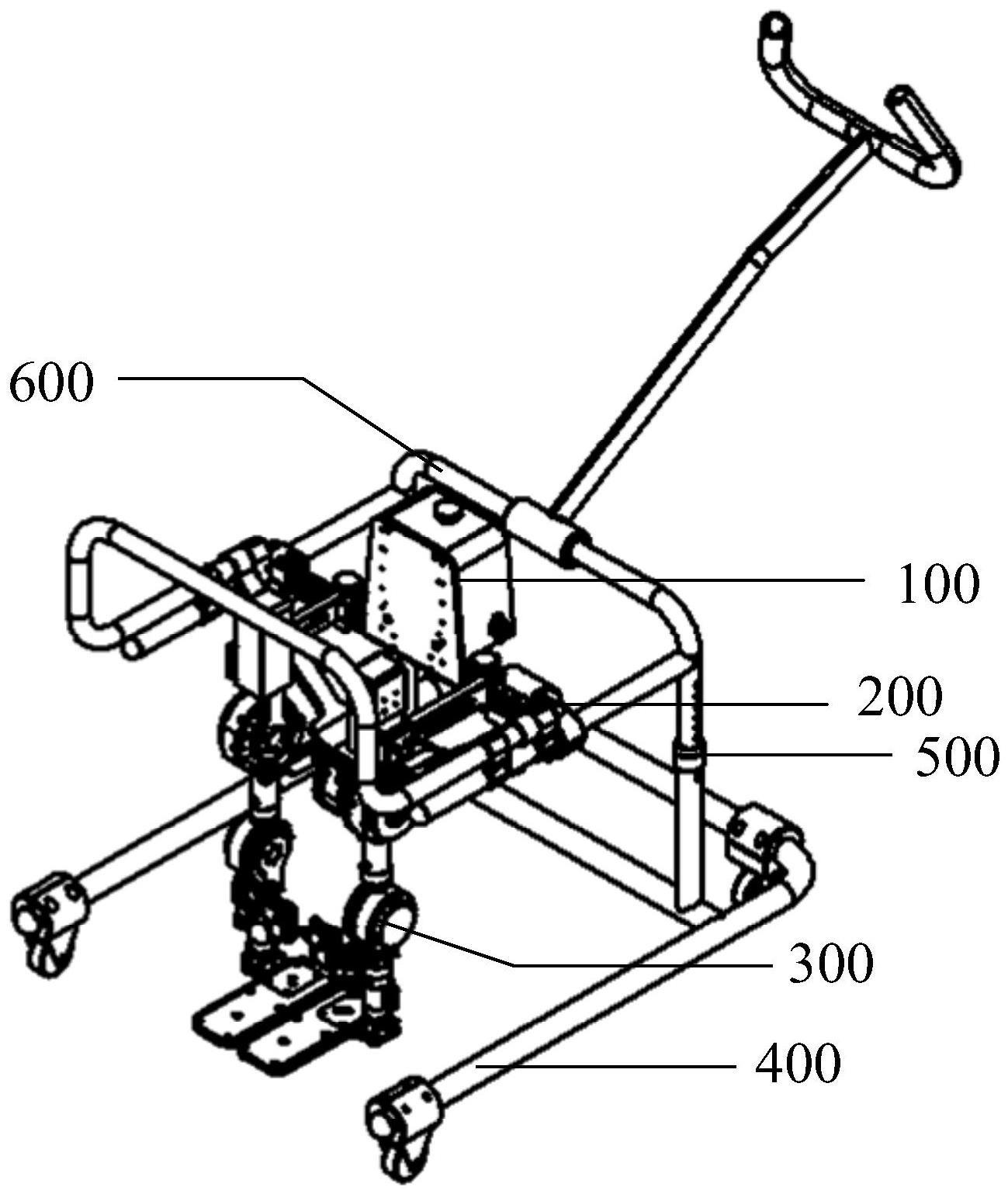
13、优选的,还包括:底座、设置在所述底座上的升降机构、与所述升降机构连接的支架和设置在所述支架上的臀部绑带;所述背板结构固定在所述支架上。
14、优选的,所述支架包括推手和扶手;所述推手和所述扶手相对设置在所述背板结构的前后两侧。
15、一种如上述任一项所述的猴子下肢外骨骼系统的控制方法,所述控制方法针对所述脑机接口设备;包括:
16、获取所述猴子的实时脑电信号和所述电机组件的实时运动参数;
17、依据所述实时脑电信号,确定期望腰部运动轨迹和期望脚底运动轨迹;
18、依据所述期望腰部运动轨迹、所述期望脚底运动轨迹和所述实时运动参数,确定髋关节输出力矩和膝关节输出力矩,并将所述髋关节输出力矩和膝关节输出力矩发送至所述驱动器。
19、优选的,所述依据所述实时脑电信号,确定期望腰部运动轨迹和期望脚底运动轨迹的步骤,包括:
20、依据所述实时脑电信号,确定期望步态、期望步幅和期望步速;
21、依据所述期望步态,确定所述期望腰部运动轨迹;
22、依据所述期望步幅和所述期望步速,确定所述期望脚底运动轨迹。
23、优选的,所述实时运动参数包括实时髋关节角度、实时髋关节角速度、实时膝关节角度和实时膝关节角速度;所述依据所述期望腰部运动轨迹、所述期望脚底运动轨迹和所述实时运动参数,确定髋关节输出力矩和膝关节输出力矩的步骤,包括:
24、依据所述期望腰部运动轨迹和所述期望脚底运动轨迹,确定期望髋关节运动轨迹和期望膝关节运动轨迹;
25、依据所述期望髋关节运动轨迹,确定期望髋关节角度和期望髋关节角速度,并依据所述期望髋关节角度、所述期望髋关节角速度、所述实时髋关节角度和所述实时髋关节角速度,生成所述髋关节输出力矩;
26、依据所述期望膝关节运动轨迹,确定期望膝关节角度和期望膝关节角速度,并依据所述期望膝关节角度、所述期望膝关节角速度、所述实时膝关节角度和所述实时膝关节角速度,生成所述膝关节输出力矩。
27、本技术具有以下优点:
28、在本技术的实施例中,相对于现有猴子下肢外骨骼系统不能调整尺寸的问题,本技术提供了通过所述腰部调节结构连接所述下肢驱动结构和所述背板结构的解决方案,具体为:“一种基于脑机接口的猴子下肢外骨骼系统,包括:脑机接口设备和外骨骼设备;所述外骨骼设备包括背板结构、相对设置在所述背板结构左右两侧的腰部调节结构和与所述腰部调节结构连接的下肢驱动结构;所述腰部调节结构包括用于调节两个所述下肢驱动结构间距的第一调节组件和用于调节所述下肢驱动结构与所述背板结构间距的第二调节组件;所述第一调节组件与所述背板结构的侧边连接;所述第二调节组件与所述第一调节组件的活动端连接;所述下肢驱动结构与所述第二调节组件的活动端连接;所述下肢驱动结构包括电机组件设置在所述电机组件的输出端的传感器组件;所述背板结构包括用于控制所述电机组件转动的驱动器;所述脑机接口设备分别与所述传感器组件和所述驱动器无线连接;所述驱动器与所述电机组件电连接;当所述猴子穿戴所述猴子下肢外骨骼系统时,所述脑机接口设备与所述猴子的脑部连接;所述背板结构对应于所述猴子的背部位置;所述下肢驱动结构对应于所述猴子的下肢位置,其中,所述电机组件对应于所述猴子的髋关节位置和膝关节位置”。通过将所述腰部调节结构设置在所述背板结构与所述下肢驱动结构之间,便于对两个所述下肢驱动结构的间距以及所述下肢驱动结构与所述背板结构的间距进行调节,使得所述猴子下肢外骨骼系统适用于不同体型的穿戴对象。
- 还没有人留言评论。精彩留言会获得点赞!