夹爪装置及机器人的制作方法
本技术涉及自动化设备,尤其涉及一种夹爪装置及机器人。
背景技术:
1、目前市场中的机器人夹爪基本为全驱动形式或者摩擦片、绳驱等欠驱动传动结构,其中全驱动形式的夹爪每个关节的驱动均由减速电机(由电机和减速器组成)旋转来实现指节的旋转抓取功能,有几个关节就设置几个减速电机,这种结构的夹爪控制复杂,加工制造难度大,生产成本高。利用摩擦片、绳驱等方式进行动力的传递,从而实现了夹爪指节的运动,这种方式驱动效率低、传动不稳定、且使用一段时间后需要对摩擦片以及驱动绳进行调整,调整繁琐,使用操作不便。
2、申请内容
3、本技术旨在至少解决相关技术中存在的技术问题之一。为此,本技术提出一种夹爪装置,有效简化了夹爪装置的结构,降低了生产成本,提高了传动效率。
4、本技术还提出一种机器人。
5、根据本技术第一方面实施例的夹爪装置,包括:
6、安装座部件;
7、手指部件,包括包括与所述安装座部件连接的壳体组件和多个指节组件,以及分别设置于所述壳体组件的第一驱动组件、多个所述手指传动组件和多个所述驱动传动组件;所述手指传动组件与对应的所述指节组件以及所述驱动传动组件连接,且至少一个所述驱动传动组件通过连接机构与对应的所述手指传动组件连接,至少一个所述驱动传动组件或者至少一个所述手指传动组件设置有连接机构,所述第一驱动组件与所述驱动传动组件连接;所述连接机构适于在第一状态与第二状态之间切换,在所述第一状态,所述驱动传动组件通过所述连接机构与对应的所述手指传动组件连接;在所述第二状态,所述驱动传动组件带动所述连接机构与对应的所述手指传动组件滚动配合。
8、根据本技术实施例的夹爪装置,通过采用连接机构连接驱动传动组件与手指传动组件,当对应的指节组件受到外力作用时,使得连接机构由第一状态切换为第二状态,使得驱动传动组件与手指传动组件由连接状态切换为滑动配合状态,其他指节组件继续运动抓取物件。在第二状态由于驱动传动组件与手指传动组件采用滚动配合方式,相较于滑动摩擦滚动摩擦的功率损失更小,有效提高了传动效率,具有结构简单,传动比稳定以及生产成本低的优点。
9、根据本技术的一个实施例,所述夹爪装置包括:
10、第一指节组件,包括浮动摇臂,所述浮动摇臂的第一端与对应的所述手指传动组件连接;
11、第二指节组件,与所述浮动摇臂的第二端以及对应的所述手指传动组件连接。
12、根据本技术的一个实施例,所述第二指节组件包括:
13、第一摇臂,所述第一摇臂的第一端与对应的所述手指传动组件连接;
14、第一连杆,所述第一连杆的第一端与所述第一摇臂的第二端转动配合;
15、手指机构,分别与所述浮动摇臂的第二端以及所述第一连杆的第二端转动配合。
16、根据本技术的一个实施例,所述手指部件包括:
17、第一手指传动组件,包括第一转轴、第一锥齿、固定锥齿和传动轴,所述第一转轴与所述壳体组件转动配合,并与所述第一锥齿以及对应的所述驱动传动组件连接;所述传动轴与所述壳体组件转动配合,所述传动轴的第一端与所述固定锥齿连接,所述传动轴的中部与所述第一摇臂的第一端连接,所述固定锥齿与所述第一锥齿啮合;
18、第二手指传动组件,与所述第一手指传动组件间隔布置,所述第二手指传动组件与所述传动轴的第二端转动配合。
19、根据本技术的一个实施例,所述第二手指传动组件包括:
20、第二转轴,与所述壳体组件以及对应的所述驱动传动组件转动配合,所述第二转轴的外周形成有转盘;
21、第二锥齿,与所述第二转轴连接;
22、浮动锥齿,可转动地套设于所述传动轴的第二端,并与所述第二锥齿啮合,所述浮动摇臂的第一端与所述浮动锥齿连接。
23、根据本技术的一个实施例,所述手指部件包括:
24、第一驱动传动组件,包括第一齿轮,所述第一齿轮与所述第一转轴连接;
25、第二驱动传动组件,包括第二齿轮,所述第二齿轮可转动地套设于所述第二转轴的外周,所述第二齿轮与所述第一齿轮啮合,所述连接机构设置于所述第二齿轮;在所述第一状态,所述连接机构与所述转盘连接;在所述第二状态,所述连接机构与所述转盘滚动配合。
26、根据本技术的一个实施例,所述连接机构包括:
27、球头柱塞,与所述第二齿轮连接,所述转盘朝向所述第二齿轮的一侧设置有凹槽,在所述第一状态,所述球头柱塞的球头嵌设于所述凹槽内;在所述第二状态,所述球头柱塞的球头与所述转盘滚动配合。
28、根据本技术的一个实施例,所述连接机构包括两个所述球头柱塞,所述第二齿轮设置有两个安装孔,两个所述安装孔关于所述第二齿轮的转轴对称,两个所述球头柱塞一一对应地嵌设于所述安装孔内。
29、根据本技术的一个实施例,所述第一驱动组件包括:
30、第一驱动电机,与所述壳体组件连接,所述第一驱动电机的转轴设置有第一主动齿轮,所述第一主动齿轮与所述第二齿轮啮合。
31、根据本技术的一个实施例,所述手指部件还包括:
32、角度旋转检测组件,与所述固定锥齿和/或所述浮动锥齿中的至少一个连接,所述角度旋转检测组件适于检测所述固定锥齿和/或所述浮动锥齿的旋转角度。
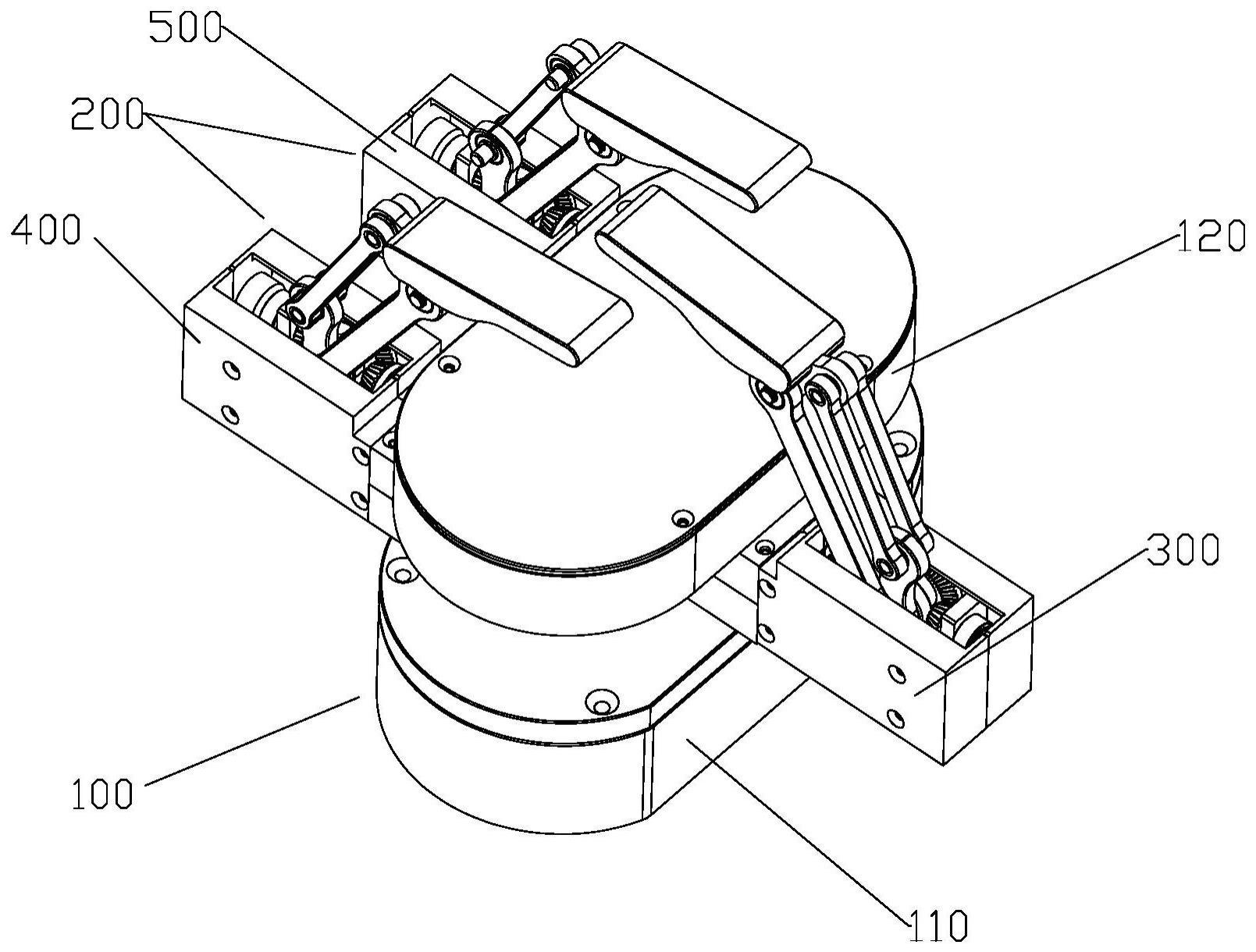
33、根据本技术的一个实施例,所述夹爪装置包括:
34、第一手指部件,所述第一手指部件的所述壳体组件与所述安装座部件连接;
35、第二手指部件,所述第二手指部件的所述壳体组件与所述安装座部件转动配合;
36、第三手指部件,所述第三手指部件的所述壳体组件与所述安装座部件转动配合;
37、传动部件,分别与所述第二手指部件以及所述第三手指部件的所述壳体组件连接,并与所述安装座部件转动配合;
38、手指驱动部件,分别与所述安装座部件以及所述传动部件连接,所述手指驱动部件适于驱动所述第二手指部件以及所述第三手指部件转动。
39、根据本技术的一个实施例,所述传动部件包括:
40、第二主动齿轮,与所述手指驱动部件连接;
41、第一旋转轴,与所述第二手指部件的所述壳体组件连接,并与所述安装座部件转动配合;
42、第二旋转轴,与所述第三手指部件的所述壳体组件连接,并与所述安装座部件转动配合;
43、第一从动齿轮,与所述第一旋转轴连接,并与所述第二主动齿轮啮合;
44、第二从动齿轮,与所述第二旋转轴连接,并与所述第二主动齿轮啮合。
45、根据本技术第二方面实施例的机器人,包括机器人主体和上述任意一项所述的夹爪装置,所述机器人主体与所述安装座部件连接。
46、本技术实施例中的上述一个或多个技术方案,至少具有如下技术效果之一:
47、根据本技术实施例的夹爪装置,通过采用连接机构连接驱动传动组件与手指传动组件,当对应的指节组件受到外力作用时,使得连接机构由第一状态切换为第二状态,使得驱动传动组件与手指传动组件由连接状态切换为滑动配合状态,其他指节组件继续运动抓取物件。在第二状态由于驱动传动组件与手指传动组件采用滚动配合方式,相较于滑动摩擦滚动摩擦的功率损失更小,有效提高了传动效率,具有结构简单,传动比稳定以及生产成本低的优点。
48、进一步的,通过使用上述夹爪装置,简化了机器人的结构,方便进行维护,降低了机器人的能耗和生产成本,增强了机器人的产品竞争力。
49、本技术的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
技术实现思路
- 还没有人留言评论。精彩留言会获得点赞!