一种虚实融合操控的数据驱动与机理混合建模与控制方法
本发明属于人与机器人的数字化协作交互,具体涉及一种虚实融合操控的数据驱动与机理混合建模与控制方法。
背景技术:
1、机器人遥操作是通过本地操作人员行为决定远端机器人运动的一项技术。在运用该技术执行任务的过程中,需要克服的最主要困难是由本地-远端之间距离过大导致的时延影响下状态不确定性问题。利用虚拟仿真技术重构远端机器人运动情况,为本地操作人员提供行为参考,是解决前述问题的有效措施。
2、基于虚拟仿真的机器人遥操作系统可将常规遥操作系统的“运动-等待-运动”,存在着在空间上虚拟模型与现场模型能够基于人机交互模型提供参考行为,但无法实现状态同步;除此之外,现有直接通过机器人的各个传感器采集的数据对机器人的姿态、轨迹等数据进行预测,存在着预测状态准确性不高的技术问题。
3、为此,为解决上述现有技术中存在的技术问题,一种新型的面向基于虚拟仿真的机器人遥操作与控制方法有待提出。
技术实现思路
1、本发明的目的是提供一种虚实融合操控的数据驱动与机理混合建模与控制方法,以解决现有技术中对机器人状态预测不准确以及无法实现实时人机交互控制的问题。
2、本发明采用以下技术方案:
3、本发明实施例一提供了一种虚实融合操控的数据驱动与机理混合建模与控制方法,该方法应用于预测模型包括:
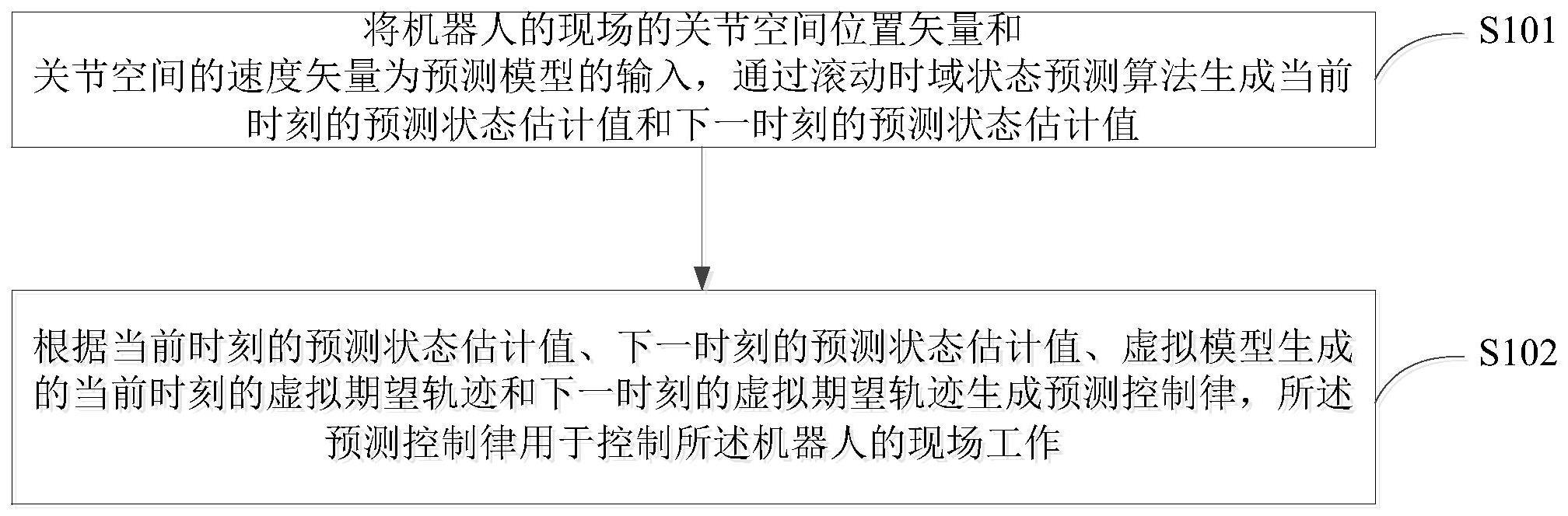
4、将机器人的现场的关节空间位置矢量和关节空间速度矢量为预测模型的输入,通过滚动时域状态预测算法生成当前时刻的预测状态估计值和下一时刻的预测状态估计值;
5、根据当前时刻的预测状态估计值、下一时刻的预测状态估计值、虚拟模型生成的当前时刻的虚拟期望轨迹和下一时刻的虚拟期望轨迹生成预测控制律,预测控制律用于控制机器人现场工作。
6、可选地,将现场的关节空间位置矢量和关节空间速度矢量和虚拟模型生成的期望轨迹作为预测模型的输入,通过滚动时域状态预测算法生成预测状态向量包括:
7、步骤1采用欧拉离散化方法对机器人操作现场的数字化模型进行处理,并迭代计算出当前时刻的预测轨迹的差分和下一时刻的预测轨迹的差分;
8、步骤2根据当前时刻的预测轨迹的差分和下一时刻的预测轨迹的差分,计算出当前时刻的预测状态向量;
9、步骤3通过滑动窗口获取预测状态向量的历史数据,预测状态向量的历史数据根据关节空间位置矢量和关节空间速度矢量计算生成;
10、步骤4以预测状态向量的历史数据与当前时刻的预测状态向量之间损失最小为优化问题,求解出当前时刻的预测状态估计值;
11、步骤5对当前时刻的状态估计值经过非线性计算,获得下一时刻的预测状态估计值。
12、可选地,根据当前时刻的预测状态估计值、下一时刻的预测状态估计值、虚拟模型生成的当前时刻的虚拟期望轨迹和下一时刻的虚拟期望轨迹生成预测控制律包括:
13、预测控制律的具体计算方式为:
14、
15、其中,定义:tk表示当前时刻,tk+1表示下一时刻,是基于滚动时域优化的状态估计值获取的预测模型的估计矩阵,是基于滚动时域优化的状态估计值获取的预测模型的非线性函数估计项,是下一时刻的预测状态估计值,是当前时刻的预测状态估计值,qd(tk+1)是虚拟模型生成的下一时刻的虚拟期望轨迹,qd(tk)是虚拟模型生成的当前时刻的虚拟期望轨迹,sp(tk)为tk时刻的滑模面,σ为相邻两次采样的时间间隔,ηp为预测模型中的趋近增益,csp是预测模型中的滑模面线性增益,τp(tk)为当前时刻的预测控制律。
16、可选地,虚拟模型生成的当前时刻的虚拟期望轨迹和下一时刻的虚拟期望轨迹通过有线或无线的方式传输至预测模型。
17、本发明实施例二提供了一种虚实融合操控的数据驱动与机理混合建模与控制方法,该方法应用于虚拟模型包括:
18、采用欧拉离散化方法对机器人操作现场的数字化模型进行处理,并迭代计算出当前时刻的虚拟期望轨迹和下一时刻的虚拟期望轨迹;
19、发送当前时刻的虚拟期望轨迹和下一时刻的虚拟期望轨迹;
20、当前时刻的虚拟期望轨迹和下一时刻的虚拟期望轨迹用于生成预测控制律。
21、本发明实施例三提供了一种虚实融合操控的数据驱动与机理混合建模与控制方法,该方法应用于现场模型包括:
22、发送机器人在连续时间下运动产生的现场的关节空间位置矢量和关节空间速度矢量;
23、接收预测控制律;预测控制律的生成方法为:
24、将机器人的现场的关节空间位置矢量和关节空间速度矢量作为预测模型的输入,通过滚动时域状态预测算法生成当前时刻的预测状态估计值和下一时刻的预测状态估计值;
25、根据当前时刻的预测状态估计值、下一时刻的预测状态估计值、当前时刻的虚拟期望轨迹和下一时刻的虚拟期望轨迹生成预测控制律;
26、根据预测控制律控制所述机器人现场运动。
27、本发明实施例四提供了一种虚实融合操控的数据驱动与机理混合建模与控制方法,包括以下步骤:
28、现场模型发送机器人在连续时间下运动产生的现场的关节空间位置矢量和关节空间速度矢量;
29、预测模型接收所述现场模型发送的机器人的现场的关节空间位置矢量和关节空间速度矢量,并输入预测模型,通过滚动时域状态预测算法生成当前时刻的预测状态估计值和下一时刻的预测状态估计值;
30、虚拟模型采用欧拉离散化方法迭代计算出当前时刻的虚拟期望轨迹和下一时刻的虚拟期望轨迹;
31、发送当前时刻的虚拟期望轨迹和下一时刻的虚拟期望轨迹;
32、虚拟模型根据当前时刻的预测状态估计值、下一时刻的预测状态估计值、当前时刻的虚拟期望轨迹和下一时刻的虚拟期望轨迹生成预测控制律,所述预测控制律用于控制所述机器人的现场工作;
33、虚拟模型接收所述预测模型生成的当前时刻的预测状态估计值和下一时刻的预测状态估计值;
34、根据当前时刻的虚拟期望轨迹、下一时刻的虚拟期望轨迹、当前时刻的预测状态估计值和下一时刻的预测状态估计值生成当前时刻的虚拟控制律。
35、本发明实施例五提供了一种虚实融合操控的数据驱动与机理混合建模与控制系统,包括:
36、现场模型,用于发送机器人在连续时间下运动产生的现场的关节空间位置矢量和关节空间速度矢量;接收预测控制律;所述预测控制律的生成方法为:
37、将机器人的现场的关节空间位置矢量和关节空间速度矢量作为预测模型的输入,通过滚动时域状态预测算法生成当前时刻的预测状态估计值和下一时刻的预测状态估计值;
38、根据当前时刻的预测状态估计值、下一时刻的预测状态估计值、当前时刻的虚拟期望轨迹和下一时刻的虚拟期望轨迹生成预测控制律;
39、根据所述预测控制律控制所述机器人现场运动;
40、预测模型,用于将机器人的现场的关节空间位置矢量和关节空间速度矢量作为预测模型的输入,通过滚动时域状态预测算法生成当前时刻的预测状态估计值和下一时刻的预测状态估计值;
41、根据当前时刻的预测状态估计值、下一时刻的预测状态估计值、当前时刻的虚拟期望轨迹和下一时刻的虚拟期望轨迹生成预测控制律,所述预测控制律用于控制所述机器人的现场工作;
42、虚拟模型,用于发送机器人在连续时间下运动产生的现场的关节空间位置矢量和关节空间速度矢量;
43、接收预测控制律;所述预测控制律的生成方法为:
44、将机器人的现场的关节空间位置矢量和关节空间速度矢量作为预测模型的输入,通过滚动时域状态预测算法生成当前时刻的预测状态估计值和下一时刻的预测状态估计值;
45、根据当前时刻的预测状态估计值、下一时刻的预测状态估计值、当前时刻的虚拟期望轨迹和下一时刻的虚拟期望轨迹生成预测控制律;根据所述预测控制律控制所述机器人现场运动。
46、本发明的有益效果是:本发明面向基于虚拟仿真的机器人遥操作过程,预测模型生成根据采集机器人历史运动数据,采用数据驱动方法计算出机器人精准的预测状态向量,通过数字化人机交互过程,形成稳定的预测操控指令,继而驱动现场模型开展实际任务作业;同时现场模型,将机器人的现场信息反馈给虚拟模型进行修正,并保证双边一致;本发明的优势在于相比传统的双边遥操作过程,操作人员不会受到现场模型直接反馈的力矩影响,通过虚拟仿真场景进行现场的理解,同时具有快速响应的特点,还能够通过设计预测和虚拟模型的更新效率,控制交互频率,降低系统的功耗。
- 还没有人留言评论。精彩留言会获得点赞!