一种核酸采样机器人的力位混合控制方法及机器人与流程
本发明涉及机器人,尤其涉及的是一种核酸采样机器人的力位混合控制方法及机器人。
背景技术:
1、咽拭子的采集需要轻柔接触受试者敏感的咽喉,同时还要保证有效的采集力度,对采集设备有比较高的要求。
2、机器人在确定采集部位后,需要控制机械臂末端棉签机构运动到采样部位,这个过程机械臂一般处于位置控制模式,该模式对力缺乏反馈,容易伤害受试者引发咽痛呕吐等不良反应。然而为保证采样安全性,如果单纯使用力控制模式容易失去控制精度,难以定位到正确的采集部位,这可能会导致采样失败。因此机器人需要在不同阶段采用不同的控制策略。
3、因此,现有技术还有待改进。
技术实现思路
1、本发明要解决的技术问题在于,针对现有技术缺陷,本发明提供一种核酸采样机器人的力位混合控制方法及机器人,以解决现有的核算采样机器人的力控制精度低的技术问题。
2、本发明解决技术问题所采用的技术方案如下:
3、第一方面,本发明提供一种核酸采样机器人的力位混合控制方法,包括:
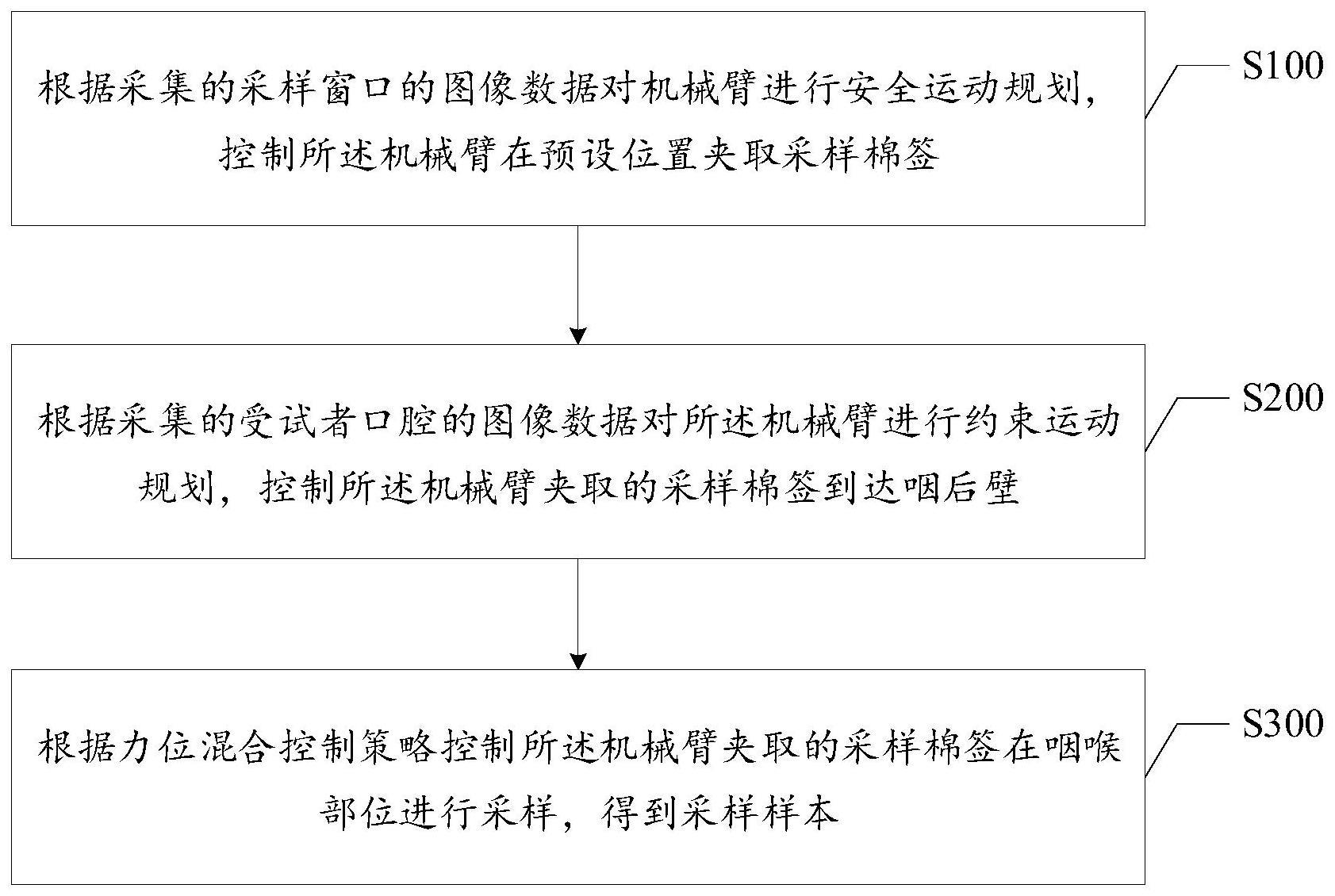
4、根据采集的采样窗口的图像数据对机械臂进行安全运动规划,控制所述机械臂在预设位置夹取采样棉签;
5、根据采集的受试者口腔的图像数据对所述机械臂进行约束运动规划,控制所述机械臂夹取的采样棉签到达咽后壁;
6、根据力位混合控制策略控制所述机械臂夹取的采样棉签在咽喉部位进行采样,得到采样样本。
7、在一种实现方式中,所述根据采集的采样窗口的图像数据对机械臂进行安全运动规划,之前包括:
8、通过机器人的机械臂末端的光学雷达相机采集采样窗口的图像数据;其中,所述采样窗口的图像数据中包括:所述采样棉签的提取位置、处理位置以及丢弃位置。
9、在一种实现方式中,所述根据采集的采样窗口的图像数据对机械臂进行安全运动规划,控制所述机械臂在预设位置夹取采样棉签,包括:
10、根据所述采样窗口的图像数据确定所述采样棉签的提取位置、处理位置以及丢弃位置;
11、根据所述提取位置、所述处理位置以及所述丢弃位置规划对应的安全运动轨迹;
12、根据规划的安全运动轨迹控制所述机械臂执行取所述采样棉签、剪所述采样棉签以及丢所述采样棉签的动作。
13、在一种实现方式中,根据采集的受试者口腔的图像数据对所述机械臂进行约束运动规划,之前包括:
14、通过机器人的机械臂末端的光学雷达相机采集受试者的图像数据和雷达数据,并根据所述图像数据和所述雷达数据识别得到所述受试者口腔的图像数据。
15、在一种实现方式中,所述根据采集的受试者口腔的图像数据对所述机械臂进行约束运动规划,控制所述机械臂夹取的采样棉签到达咽后壁,包括:
16、根据所述受试者口腔的图像数据和rt轨迹规划算法规划避开窗口障碍物、牙齿以及舌头的约束运动路径;
17、根据所述约束运动路径和分段控制策略控制所述机械臂夹取的采样棉签到达咽后壁。
18、在一种实现方式中,所述分段控制策略包括:
19、设定力阈值fthre;
20、判断运动过程中的受力fact是否小于fthre;
21、若受力fact小于fthre,则判定未触碰到所述受试者,并根据位置控制模式控制所述机械臂继续前进;
22、若受力fact等于或大于fthre,则判定触碰到所述受试者,并根据阻抗控制策略控制所述机械臂夹取的采样棉签到达咽后壁。
23、在一种实现方式中,所述力位混合控制策略,包括:
24、约束vx,vy,ωx,ωy,ωz方向上的运动,采用阻抗控制策略控制z方向,并根据期望力和输入力的差值控制所述机械臂的输出力保持在预设范围内。
25、在一种实现方式中,所述根据力位混合控制策略控制所述机械臂夹取的采样棉签在咽喉部位进行采样,包括:
26、控制所述机械臂夹取的棉签越过所述受试者的舌根,分别在所述受试者的扁桃体位置和所述咽后壁上进行来回擦拭,并根据六维力传感器采集的力数据控制所述受试者的受力在预设范围内。
27、第二方面,本发明还提供一种机器人,包括:处理器以及存储器,所述存储器存储有核酸采样机器人的力位混合控制程序,所述核酸采样机器人的力位混合控制程序被所述处理器执行时用于实现如第一方面所述的核酸采样机器人的力位混合控制方法的操作。
28、第三方面,本发明还提供一种存储介质,所述存储介质为计算机可读存储介质,所述存储介质存储有核酸采样机器人的力位混合控制程序,所述核酸采样机器人的力位混合控制程序被处理器执行时用于实现如第一方面所述的核酸采样机器人的力位混合控制方法的操作。
29、本发明采用上述技术方案具有以下效果:
30、本发明根据采集的采样窗口的图像数据对机械臂进行安全运动规划,可以控制机械臂在预设位置夹取采样棉签;并且根据采集的受试者口腔的图像数据对机械臂进行约束运动规划,可以控制机械臂夹取的采样棉签到达咽后壁;以及根据力位混合控制策略控制机械臂夹取的采样棉签在咽喉部位进行采样,可以得到采样样本;本发明基于不同的采样阶段灵活使用不同的控制策略,充分发挥位置控制带来的高精度,同时能保证基于力反馈的及时响应,保证采样的有效性、舒适性和安全性,提高了采样效率。
技术特征:
1.一种核酸采样机器人的力位混合控制方法,其特征在于,包括:
2.根据权利要求1所述的核酸采样机器人的力位混合控制方法,其特征在于,所述根据采集的采样窗口的图像数据对机械臂进行安全运动规划,之前包括:
3.根据权利要求1所述的核酸采样机器人的力位混合控制方法,其特征在于,所述根据采集的采样窗口的图像数据对机械臂进行安全运动规划,控制所述机械臂在预设位置夹取采样棉签,包括:
4.根据权利要求1所述的核酸采样机器人的力位混合控制方法,其特征在于,根据采集的受试者口腔的图像数据对所述机械臂进行约束运动规划,之前包括:
5.根据权利要求1所述的核酸采样机器人的力位混合控制方法,其特征在于,所述根据采集的受试者口腔的图像数据对所述机械臂进行约束运动规划,控制所述机械臂夹取的采样棉签到达咽后壁,包括:
6.根据权利要求5所述的核酸采样机器人的力位混合控制方法,其特征在于,所述分段控制策略包括:
7.根据权利要求1所述的核酸采样机器人的力位混合控制方法,其特征在于,所述力位混合控制策略,包括:
8.根据权利要求1所述的核酸采样机器人的力位混合控制方法,其特征在于,所述根据力位混合控制策略控制所述机械臂夹取的采样棉签在咽喉部位进行采样,包括:
9.一种机器人,其特征在于,包括:处理器以及存储器,所述存储器存储有核酸采样机器人的力位混合控制程序,所述核酸采样机器人的力位混合控制程序被所述处理器执行时用于实现如权利要求1-8中任意一项所述的核酸采样机器人的力位混合控制方法的操作。
10.一种存储介质,其特征在于,所述存储介质为计算机可读存储介质,所述存储介质存储有核酸采样机器人的力位混合控制程序,所述核酸采样机器人的力位混合控制程序被处理器执行时用于实现如权利要求1-8中任意一项所述的核酸采样机器人的力位混合控制方法的操作。
技术总结
本发明公开了一种核酸采样机器人的力位混合控制方法及机器人,包括:根据采集的采样窗口的图像数据对机械臂进行安全运动规划,控制所述机械臂在预设位置夹取采样棉签;根据采集的受试者口腔的图像数据对所述机械臂进行约束运动规划,控制所述机械臂夹取的采样棉签到达咽后壁;根据力位混合控制策略控制所述机械臂夹取的采样棉签在咽喉部位进行采样,得到采样样本。本发明基于不同的采样阶段灵活使用不同的控制策略,充分发挥位置控制带来的高精度,同时能保证基于力反馈的及时响应,保证采样的有效性、舒适性和安全性,提高了采样效率。
技术研发人员:张添威,郑仕沛,林天麟
受保护的技术使用者:深圳市人工智能与机器人研究院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!