一种用于海洋贝类清理的水下机器人的机械臂
1.本实用新型属于近海养殖设备领域,具体涉及一种海洋贝类清理的水下机器人的机械臂。
背景技术:
2.近海养殖贝类是海洋养殖的重要组成部分,通常选择合适的水域,将扇贝水产品投放于悬吊在海面下数米的养殖笼中进行浮吊养殖。扇贝养殖的敌害生物包括附着性及肉食性二大类,附着性生物包插杂藻、苔藓虫、海绵、牡蛎、藤壶、石灰虫等,贝类表面附着性生物过多时影响其生长和产品质量。现有技术对贝类清理通常是将养殖笼吊出水面,利用高压水枪喷射,去除贝类表面附着物,由于隔着网笼,该方式清理效果不好,人力成本高,另,该方式将贝类频繁吊出水面也影响了贝类生长。也有使用水下机器人,配合简单机械臂并在机械臂末端安装机械刷,伸入到养殖笼中对贝类清理,然而养殖笼具有一定深度,简单机械臂工作时旋转摆动,很容易受网笼侧壁缠绕,影响工作效率。
技术实现要素:
3.本实用新型的目的在于提供一种用于海洋贝类清理的水下机器人的机械臂,该设备自由度高,清理效果好也不影响贝类生长。
4.实现上述目的技术方案包括如下内容。
5.一种用于海洋贝类清理的水下机器人的机械臂,包括控制器和依序通过可控关节连接的第一臂、第二臂、第三臂和机械刷,第一臂和第二臂均为长度可控的伸缩臂。
6.进一步,所述第一臂包括第一臂壳和与第一臂壳配套的第一内衬,第一内衬的一端通过第一可控关节与第二臂相连,第一内衬的另一端从第一臂壳的一端穿插于第一臂壳内,第一臂壳与第一内衬通过第一伸缩机构相连,所述第一伸缩机构包括第一齿条、第一传动轮系、第一步进电机和第一距离传感器,所述第一齿条与第一臂的轴向平行设置,第一内衬的两个相对的内侧壁上均设有第一齿条,所述第一传动轮系包括与第一臂壳相连的第一主动轮和与其啮合的两个第一从动轮,两个第一从动轮对称设置第一主动轮的两侧,两个第一从动轮分别与部署在第一内衬内侧壁上的第一齿条啮合,第一主动轮的转轴与安装在第一臂壳上的第一步进电机的输出端相连,第一距离传感器设置与第一臂壳上,用来测量第一内衬与第一臂壳的相对位置,第一可控关节、第一距离传感器与第一步进电机均与控制器电连接;采用齿轮齿条机构改变第一臂长度相对液压气缸机构可以缩小伸缩机构的体积,进而控制机械臂的径向尺寸,使其更加适合在养殖笼内狭长空间工作。
7.进一步,所述第一伸缩机构还包括第一惰轮系,所述第一惰轮系包括与第一臂壳相连的第一中心惰轮和与其啮合的两个第一传动齿轮,两个第一传动齿轮对称设置第一中心惰轮的两侧,两个第一传动齿轮分别与部署在第一内衬内侧壁上的第一齿条啮合。第一惰轮系对第一齿条起到支撑作用,使得第一内衬在第一臂壳内运动更加平顺,便于第一臂伸缩。
8.进一步,所述第二臂包括第二臂壳和与第二臂壳配套的第二内衬,第二内衬的一端通过第二可控关节与第三臂相连,第二内衬的另一端从第二臂壳的一端穿插于第二臂壳内,第二臂壳的另一端通过第一可控关节与第一臂相连,第二臂壳与第二内衬通过第二伸缩机构相连,所述第二伸缩机构包括第二齿条、第二传动轮系、第二步进电机和第二距离传感器,所述第二齿条与第二臂的轴向平行设置,第二内衬的两个相对的内侧壁上均设有第二齿条,所述第二传动轮系包括与第二臂壳相连的第二主动轮和与其啮合的两个第二从动轮,两个第二从动轮对称设置第二主动轮的两侧,两个第二从动轮分别与部署在第二内衬内侧壁上的第二齿条啮合,第二主动轮的转轴与安装在第二臂壳上的第二步进电机的输出端相连,第二距离传感器设置与第二臂壳上,用来测量第二内衬与第二臂壳的相对位置,第一、二可控关节、第二距离传感器、第二步进电机均与控制器电连接;采用齿轮齿条机构改变第二臂长度相对液压气缸机构可以缩小伸缩机构的体积,进而控制机械臂的径向尺寸,使其更加适合在养殖笼内狭长空间工作。
9.进一步,所述第二伸缩机构还包括第二惰轮系,所述第二惰轮系包括与第二臂壳相连的第二中心惰轮和与其啮合的两个第二传动轮,两个第二传动轮对称设置第二中心惰轮的两侧,两个第二传动轮分别与部署在第二内衬内侧壁上的第二齿条啮合。第二惰轮系对第二齿条起到支撑作用,使得第二内衬在第二臂壳内运动更加平顺,便于第二臂伸缩。
10.进一步,机械刷包括高速电机、中心杆、复位簧、滑环和刷爪,高速电机通过第三可控关节与第三臂连接,中心杆的上端与高速无刷电机转轴相连,复位簧套接在中心杆上,复位簧上端与中心杆相连,滑环与复位簧下端相连并套装在中心杆上,所述刷爪包括刷板、连杆,刷板底面设有毛刷,刷板一端与中心杆底端通过铰链连接,刷板另一端通过连杆与滑环相连,刷爪不少于3个并围绕中心杆的下部均匀部署,高速无刷电机与控制器电连接。
11.进一步,所述刷爪为3个,3个刷爪围绕中心杆下部间隔120
°
部署。
12.进一步,所述刷板长50-150mm。合适长度的刷板,有利于刷洗清洁贝类表面,又不至于太大造成在养殖笼中活动收限。
13.上述用于海洋贝类清理的水下机器人的机械臂使用时,第一臂与水下机器人相连,机械臂伸入到贝类养殖笼内,机械刷擦除贝类表面的有害附着物,可以根据养殖笼的长度,通过调整第一臂和第二臂的长度,以调整机械刷进入养殖笼的位置,使机械刷能够顺利清理到养殖笼中的所有养殖的贝类产品;进一步优化的是,本案的机械刷采用高速电机驱动刷爪高速转动,在复位簧的作用下,刷板与贝类表面保持弹性压力,既能够清除贝类表面杂物又可以有效保护贝类免受伤害。
14.本实用新型的水下机器人的机械臂采用了可控的关节,可以实现对末端机械刷角度的调节,本案的机械臂第一、二臂能够伸缩相对现有简易机械臂可以更好的在狭小养殖笼内进行伸展,满足清理的需要。
15.本案所述可控关节是指装有两个电机具有两个可控的自由度的活动关节组件。
附图说明
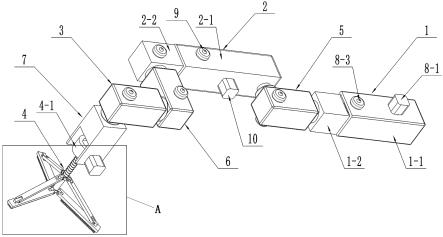
16.图1为本实用新型实施例的结构示意图;
17.图2为图1中a部放大图;
18.图3为实施例的第一伸缩机构与第一内衬、第一臂壳的结构示意图;
19.图4为实施例的电路连接示意图。
20.图中,1.第一臂;1-1.第一臂壳;1-2.第一内衬;2.第二臂;2-1第二臂壳2-2.第二内衬;3.第三臂;4.机械刷;4-1.高速电机;4-2.中心杆;4-3.复位簧;4-4.滑环;4-5.刷爪;4-5
‑ꢀ
1.刷板;4-5-2.连杆;5.第一可控关节;6.第二可控关节;7.第三可控关节;8.第一伸缩机构; 8-1.第一步进电机;8-2.第一传动轮系;8-2-1.第一主动轮;8-2-2.第一从动轮;8-3.第一距离传感器;8-4.第一齿条;8-5.第一惰轮系;8-5-1.第一中心惰轮;8-5.第一传动齿轮;9.第二距离传感器;10.第二步进电机。
具体实施方式
21.以下结合实施例对本实用新型进行详细的说明。
22.参见图1至图4,一种用于海洋贝类清理的水下机器人的机械臂,包括控制器和第一臂1、第二臂2、第三臂3和机械刷4,第一臂1包括第一臂壳1-1和与第一臂壳1-1配套的第一内衬1-2,第一内衬1-2的一端通过第一可控关节5与第二臂2相连,第一内衬1-2的另一端从第一臂壳1-1的一端穿插于第一臂壳1-1内,第一臂壳1-1与第一内衬1-2通过第一伸缩机构8相连,第一伸缩机构8包括第一齿条8-4、第一传动轮系8-2、第一步进电机 8-1、第一距离传感器8-3和第一惰轮系8-5,第一齿条8-4与第一臂1的轴向平行设置,第一内衬1-2的两个相对的内侧壁上均设有第一齿条8-4,第一传动轮系8-2包括与第一臂壳 1-1相连的第一主动轮8-2-1和与其啮合的两个第一从动轮8-2-2,两个第一从动轮8-2-2对称设置第一主动轮8-2-1的两侧,两个第一从动轮8-2-2分别与部署在第一内衬1-2内侧壁上的第一齿条8-4啮合,第一主动轮8-2-1的转轴与安装在第一臂壳1-1上的第一步进电机 8-1的输出端相连,第一距离传感器8-3设置与第一臂壳1-1上,用来测量第一内衬1-2与第一臂壳1-1的相对位置,第一可控关节5、第一距离传感器8-3与第一步进电机8-1均与控制器电连接,第一惰轮系8-5包括与第一臂壳1-1相连的第一中心惰轮8-5-1和与其啮合的两个第一传动齿轮8-5,两个第一传动齿轮8-5对称设置第一中心惰轮8-5-1的两侧,两个第一传动齿轮8-5分别与部署在第一内衬1-2内侧壁上的第一齿条8-4啮合;
23.第二臂2包括第二臂壳2-1和与第二臂壳2-1配套的第二内衬2-2,第二内衬2-2的一端通过第二可控关节6与第三臂3相连,第二内衬2-2的另一端从第二臂壳2-1的一端穿插于第二臂壳2-1内,第二臂壳2-1的另一端通过第一可控关节5与第一内衬1-2相连,第二臂壳2-1 与第二内衬2-2通过第二伸缩机构相连,第二伸缩机构包括第二齿条、第二传动轮系、第二步进电机10、第二距离传感器9和第二惰轮系,第二齿条与第二臂2的轴向平行设置,第二内衬2-2的两个相对的内侧壁上均设有第二齿条,第二传动轮系和第二惰轮系均安装在第二臂壳2-1内,且分别与第一传动轮系8-2和第一惰轮系8-5结构相同,第二距离传感器9 设置与第二臂壳2-1上,用来测量第二内衬2-2与第二臂壳2-1的相对位置,第二可控关节、第二距离传感器9、第二步进电机10均与控制器电连接;
24.机械刷4包括高速电机4-1、中心杆4-2、复位簧4-3、滑环4-4和3个刷爪4-5,高速电机 4-1通过第三可控关节7与第三臂3连接,中心杆4-2的上端与高速电机4-1转轴相连,复位簧4-3套接在中心杆4-2上,复位簧4-3上端与中心杆4-2相连,滑环4-4与复位簧4-3下端相连并套装在中心杆4-2的中部,刷爪4-5包括刷板4-5-1、连杆4-5-2,刷板4-5-1底面设有毛刷,刷板4-5-1长100mm,刷板4-5-1一端与中心杆4-2底端通过铰链连接,刷板4
‑ꢀ
5-1另一
端通过连杆4-5-2与滑环4-4相连,本实施例,3个刷爪4-5围绕中心杆4-2下部间隔120
°
部署,高速电机4-1与控制器电连接。
25.上述实施例的机械臂使用时,将第一臂壳1-1安装在水下机器人上,当需要机械刷4 深入较长的养殖笼内时,控制器指令第一步进电机8-1和第二步进电机10转动,第一传动轮系8-2和第二传动轮系将步进电机转动传输给第一齿条8-4和第二齿条,第一内衬1-2和第二内衬2-2分别相对第一臂壳1-1和第二臂壳2-1滑出,从而改变第一臂1和第二臂2的长度,整个机械臂得到延长,机械刷4工作半径增大,高速电机4-1转动,刷爪4-5跟随转动,在复位簧4-3作用下,刷板4-5-1底面紧贴贝类表面,毛刷摩擦贝类表面保持了持续压力,达到清洁效果,又不至于损伤贝类产品。采用了本实用新型的用于海洋贝类清理的水下机器人的机械臂能够适应养殖笼的形状,提高了清理贝类表面杂物的效率,减少了人工成本,保证了贝类稳定的生长环境。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1