一种多功能机械爪的制作方法
1.本实用新型涉及机械爪技术领域,具体是涉及一种多功能机械爪。
背景技术:
2.随着科学技术的发展,工业生产的众多过程都逐渐被机器设备取代,极大地提高了工业生产的效率和产品质量。工业生产中,很多人工的过程都已被机械手所取代。在许多场合,一般根据需要抓取的物品外形专门设计机械手或机械爪,然而在如今品类众多的生产车间内,针对单一物品专门设计的机械手或机械爪远无法实现对多种物品的抓取,适应性差,且在生产过程中需要不断重新专门设计及更换机械手或机械爪,极大了降低了机械化车间的生产料率,同时提高了生产成本。故由此提出如何使得机械爪可以被用于多种工作环境中的技术问题。
技术实现要素:
3.基于此,有必要针对现有技术问题,提供一种多功能机械爪,包括底板和抓取机构;抓取机构在底板上,抓取机构包括抓取组件、第一直线驱动器、导向组件、放置板、吸附头和吸盘;第一直线驱动器固定设置在底板上;导向组件固定设置在第一直线驱动器输出轴的一侧;放置板固定设置在导向组件远离第一直线驱动器的一端上;吸附头固定设置在放置板上;吸盘设置在吸附头远离放置板的一端上;抓取组件固定设置在第一直线驱动器的输出端上。
4.优选的,抓取组件包括滑动座、凹槽、第二直线驱动器、固定板、爪臂和爪头;滑动座固定设置在第一直线驱动器的输出端上;凹槽设置有多个,凹槽围绕第一直线驱动器输出轴的轴线均匀的开设在滑动座的侧壁上;第二直线驱动器设置在凹槽内;固定板固定设置在第二直线驱动器的输出端上;爪臂固定设置在固定板上;爪头固定设置在爪臂远离固定板的一端上。
5.优选的,导向组件包括导向杆和导向孔;导向孔至少设置有一个,导向孔沿第一直线驱动器的长度方向贯穿的设置在滑动座上;导向杆可滑动的设置在导向孔内。
6.优选的,抓取机构还包括换装槽;换装槽为螺纹状结构,换装槽开设在吸附头远离第一直线驱动器的一端上,吸附头通过换装槽与吸盘螺纹配合。
7.优选的,抓取机构还包括更换组件,更换组件包括第一换装孔和第二换装孔;第一换装孔开设在爪臂靠近固定板的一端上;第二换装孔开设在爪头靠近爪臂的一端上。
8.优选的,还包括固定机构,固定机构包括第一固定孔和第二固定孔;第一固定孔开设在第一直线驱动器的侧壁上;第二固定孔沿第一固定孔的轴线开设在底板上。
9.本技术相比较于现有技术的有益效果是:
10.1.本技术通过设置抓取组件、第一直线驱动器、导向组件、放置板、吸附头和吸盘,实现了机械爪可以对多种形状的待夹取件进行夹取的技术要求。
11.2.本技术通过设置滑动座、凹槽、第二直线驱动器、固定板、爪臂和爪头,实现了抓
取组件对于待夹取件的夹取功能。
12.3.本技术通过设置导向杆和导向孔,实现了导向组件可以使得滑动座可以稳定的被第一直线驱动器的输出端带动伸出的技术要求。
附图说明
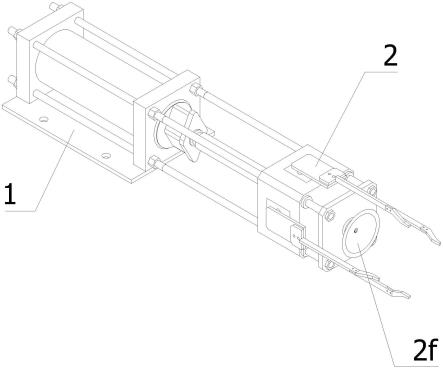
13.图1是本技术的立体图一;
14.图2是本技术的立体图二;
15.图3是本技术的去除了底板后的组装立体图;
16.图4是本技术的局部立体图一;
17.图5是本技术的图4中a处的局部放大图;
18.图6是本技术的局部立体图二;
19.图7是本技术的局部立体图三。
20.图中标号为:
21.1-底板;
22.2-抓取机构;2a-抓取组件;2a1-滑动座;2a2-凹槽;2a3-第二直线驱动器;2a4-固定板;2a5-爪臂;2a6-爪头;2b-第一直线驱动器;2c-导向组件;2c1-导向杆;2c2-导向孔;2d-放置板;2e-吸附头;2e1-换装槽;2f-吸盘;2g-更换组件;2g1-第一换装孔;2g2-第二换装孔;
23.3-固定机构;3a-第一固定孔;3b-第二固定孔。
具体实施方式
24.为能进一步了解本实用新型的特征、技术手段以及所达到的具体目的、功能,下面结合附图与具体实施方式对本实用新型作进一步详细描述。
25.如图1-7所示,本技术提供:
26.一种多功能机械爪,包括底板1和抓取机构2;抓取机构2在底板1上,抓取机构2包括抓取组件2a、第一直线驱动器2b、导向组件2c、放置板2d、吸附头2e和吸盘2f;第一直线驱动器2b固定设置在底板1上;导向组件2c固定设置在第一直线驱动器2b输出轴的一侧;放置板2d固定设置在导向组件2c远离第一直线驱动器2b的一端上;吸附头2e固定设置在放置板2d上;吸盘2f设置在吸附头2e远离放置板2d的一端上;抓取组件2a固定设置在第一直线驱动器2b的输出端上。
27.基于上述实施例,本技术想要解决的技术问题是如何使得机械爪可以被用于多种工作环境中。为此,本技术第一直线驱动器2b的侧壁与底板1的端面接触,第一直线驱动器2b优选为伺服电机,本处以抓取组件2a处于伸出状态时为例,此时第一直线驱动器2b的输出端处于伸出的状态。在第一直线驱动器2b的一侧设置有气泵,吸附头2e远离吸盘2f的一端通过管路与气泵连接。当所夹取的物品可以被抓取组件2a抓取时,此时抓取组件2a便可将物品夹起来,当所需夹取的物品无法被抓取组件2a抓取时,此时第一直线驱动器2b便会启动,第一直线驱动器2b的输出端会缓缓缩回,这样便会使得固定设置在第一直线驱动器2b输出端上的抓取组件2a被一同带回,当抓取组件2a远离第一直线驱动器2b的一端低于吸盘2f时,此时便实现了机械爪功能的转换。在进行使用时,设置在第一直线驱动器2b一侧的
气泵便会开始启动,当吸盘2f与待抓取件接触时,此时吸盘2f中空气便会被气泵通过管路抽出,进而使得吸盘2f可以紧紧的将待抓取件吸附,从而实现对于待抓取件的拿取。反之,当吸盘2f无法将待抓取件吸附住时,此时第一直线驱动器2b便会在此启动,第一直线驱动器2b会带动设置在其输出端上的抓取组件2a缓缓伸出,当第一直线驱动器2b的输出端完全伸出时,此时抓取组件2a远离第一直线驱动器2b的一端便会超过吸盘2f,随后抓取组件2a便可对待抓取件进行抓取作业。如此便实现了机械爪可以对多种形状的待夹取件进行夹取的技术要求。
28.进一步的,如图3-4和图6所示:
29.抓取组件2a包括滑动座2a1、凹槽2a2、第二直线驱动器2a3、固定板2a4、爪臂2a5和爪头2a6;滑动座2a1固定设置在第一直线驱动器2b的输出端上;凹槽2a2设置有多个,凹槽2a2围绕第一直线驱动器2b输出轴的轴线均匀的开设在滑动座2a1的侧壁上;第二直线驱动器2a3设置在凹槽2a2内;固定板2a4固定设置在第二直线驱动器2a3的输出端上;爪臂2a5固定设置在固定板2a4上;爪头2a6固定设置在爪臂2a5远离固定板2a4的一端上。
30.基于上述实施例,本技术想要解决的技术问题是抓取组件2a是如何实现抓取功能的。为此,本技术第二直线驱动器2a3优选为伺服电机,第二直线驱动器2a3与凹槽2a2相互对应,当第一直线驱动器2b的输出端带动滑动座2a1伸出后,此时便说明需要抓取组件2a来进行抓取。当第一直线驱动器2b完全伸出时,说明此时机械爪的抓取方式已经完成改变。随后设置在凹槽2a2中的第二直线驱动器2a3的输出端便会同步伸出,这样就会使得固定设置在第二直线驱动器2a3输出端上的固定板2a4被带动伸出,进而使得固定设置在固定板2a4上的爪臂2a5以及固定设置在爪臂2a5上的抓头被固定板2a4带动一同移动,此时从整体上看,爪臂2a5和爪头2a6处于张开的状态,爪臂2a5和爪头2a6形成了一个包围圈,这样在夹取时,只需使得待夹取件位于爪臂2a5和爪头2a6的包围圈中即可,随后第二直线驱动器2a3便会再次启动,第二直线驱动器2a3的输出端会缓缓缩回,这样就会使得固定设置在第二直线驱动器2a3输出端上的固定板2a4被一同带动移动,进而使得固定设置在固定板2a4上的爪臂2a5和爪头2a6被带动收缩,当爪头2a6与待夹取件相接触时,则此时第二直线驱动器2a3便会停止运行,这样便实现了抓取组件2a对于待夹取件的夹取功能。
31.进一步的,如图6-7所示:
32.导向组件2c包括导向杆2c1和导向孔2c2;导向孔2c2至少设置有一个,导向孔2c2沿第一直线驱动器2b的长度方向贯穿的设置在滑动座2a1上;导向杆2c1可滑动的设置在导向孔2c2内。
33.基于上述实施例,本技术想要解决的技术问题是如何使得滑动座2a1可以稳定的被第一直线驱动器2b的输出端带动伸出。为此,本技术导向孔2c2形状任意,导向杆2c1的形状与导向孔2c2相契合,当第一直线驱动器2b带动设置在其输出端上的滑动座2a1伸出或缩回时,此时滑动座2a1上的导向孔2c2便会与导向杆2c1发生相对滑动。正是由于导向杆2c1和导向孔2c2的限制,使得第一直线驱动器2b在带动滑动座2a1伸出或缩回时,不会出现偏转的现象。如此便实现了导向组件2c可以使得滑动座2a1可以稳定的被第一直线驱动器2b的输出端带动伸出的技术要求。
34.进一步的,如图5所示:
35.抓取机构2还包括换装槽2e1;换装槽2e1为螺纹状结构,换装槽2e1开设在吸附头
2e远离第一直线驱动器2b的一端上,吸附头2e通过换装槽2e1与吸盘2f螺纹配合。
36.基于上述实施例,本技术想要解决的技术问题是如何使得在对吸盘2f进行更换时更方便。为此,本技术吸盘2f在使用一段时间后,会出现老化的现象,这样就会使得吸盘2f的吸力不足,如果将吸盘2f固定设置在吸附头2e上,这样在进行更换时就十分麻烦,而在吸附头2e的开设换装槽2e1后,在对吸盘2f进行换装时,只需将吸盘2f从吸附头2e上拧下即可。如此便方便了对吸盘2f的换装。
37.进一步的,如图2-3所示:
38.抓取机构2还包括更换组件2g,更换组件2g包括第一换装孔2g1和第二换装孔2g2;第一换装孔2g1开设在爪臂2a5靠近固定板2a4的一端上;第二换装孔2g2开设在爪头2a6靠近爪臂2a5的一端上。
39.基于上述实施例,本技术想要解决的技术问题是如何对爪臂2a5和爪头2a6进行换装。为此,本技术爪臂2a5通过第一螺丝穿过其上的第一换装孔2g1固定设置在固定板2a4上,爪头2a6通过第二螺丝穿过其上的第二换装孔2g2固定设置在爪臂2a5上。在对爪臂2a5和爪头2a6进行更换时,只需将对应的第一螺丝和第二螺丝取下即可。
40.进一步的,如图2-3所示:
41.还包括固定机构3,固定机构3包括第一固定孔3a和第二固定孔3b;第一固定孔3a开设在第一直线驱动器2b的侧壁上;第二固定孔3b沿第一固定孔3a的轴线开设在底板1上。
42.基于上述实施例,本技术想要解决的技术问题是第一直线驱动器2b是如何固定在放置板2d上。为此,本技术在进行安装时,需要用第三螺丝穿过第二固定孔3b并与第一固定孔3a螺纹配合即可。
43.以上实施例仅表达了本实用新型的一种或几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1