一种用于城市地下轨道交通隧道的壁挂式巡检机器人的制作方法
1.本实用新型属于隧道自动巡检设备技术领域,具体涉及一种用于城市地下轨道交通隧道的壁挂式巡检机器人。
背景技术:
2.近年来我国城市轨道交通快速发展,运营里程和覆盖面积快速提升,普及人群日益增多。因此保障城市轨道交通隧道安全、乘客安全具有重要意义。
3.目前城市轨道交通巡检主要通过人工巡检或人工+自动化设备辅助巡检,巡检归档效率较低,且辅助巡检、通讯、维修、救援等相关设备集成性较差。由于地铁隧道的特殊结构限制,在城市轨道交通隧道内,隧道内壁上方已有相关设备布局,传统的吊轨/挂轨机器人布置位置受限。同时城市轨道交通隧道距离较长,传统机器人续航距离受到限制。
4.目前巡检机器人主要以吊挂为主,承重性、稳定性相对较差。例如专利cn110977928a公开了一种挂轨机器人和巡检系统。其包括:驱动机构
‑ꢀ
用于可滑动地吊挂在挂轨上;主体以及连接件-用于将机器人主体可拆卸地挂接在驱动机构上。能够实现主体与驱动机构的快速分离。但其结构承载能力较低,扩展能力较差,且其吊挂结构不适用于城市地下轨道交通隧道的应用场景。
5.鉴于此,需要研发一款无需停靠充电的,多用途集成的壁挂式巡检机器人,以实现机器人的壁侧面安装、长续航、高集成性、方便安装拆卸等目标。
技术实现要素:
6.针对现有技术的以上缺陷或改进需求中的一种或者多种,本实用新型提供了一种用于城市地下轨道交通隧道的壁挂式巡检机器人,各区功能分离,且具有高集成性,可沿隧道侧面稳定行走。
7.为实现上述目的,本实用新型提供一种用于城市地下轨道交通隧道的壁挂式巡检机器人,所述巡检机器人通过若干支撑座与隧道内壁固定;
8.所述支撑座端部固定有轨道,且轨道一侧与所述支撑座固定,相对的一侧设有滑触线导电槽,与储能电池引出的滑触线取电刷相匹配;所述轨道顶部和底部对应开设有与走行轮和支撑轮相匹配的导轨槽,所述走行轮和支撑轮分别卡于其中,从而沿隧道纵向移动;
9.所述巡检机器人包括中央控制区、与其中央控制器电连接的设备区、接口扩展区及能源区;所述设备区用于安装信息搜集与发布模块、通信模块以及执行机构;所述接口扩展区为机器人二次开发预留接口,包括机械安装接口和信息通讯接口;所述能源区包括储能电池、取电刷;
10.所述中央控制器与通讯模块电连接,通过通信模块与车站基站通讯,并通过基站将信息传输至服务器,由控制终端进行控制。
11.作为本实用新型的进一步改进,所述支撑轮通过支撑推杆与可变空气悬架连接,
所述支撑推杆包括顶杆和固定在顶杆两侧并与其垂直的侧杆,其中顶杆穿过支撑轮中心设置的轴承,侧杆底部分别设有活塞,且两侧的活塞分别位于可变空气悬架内部,并可沿其竖向移动。
12.作为本实用新型的进一步改进,所述可变空气悬架设有气阀,同时所述可变空气悬架与空气蠕动泵连接。
13.作为本实用新型的进一步改进,所述设备区安装有自适应配重调节装置,包括步进电机、滚珠丝杠,所述滚珠丝杠一端与所述步进电机连接,另一端与设备区壳体内部固定,滚珠丝杠上设有可沿其移动的配重。
14.作为本实用新型的进一步改进,所述走行轮包括主动轮和从动轮,两者通过皮带连接,所述主动轮与伺服电机连接,该伺服电机驱动齿轮转动;所述驱动齿轮通过传动轴与球笼式万向节连接,驱动主动轮转动,从而带动从动轮和支撑轮转动。
15.作为本实用新型的进一步改进,所述巡检机器人配置有缓冲减震器,该缓冲减震器一端固定于机器人壳体上,另一端通过轴承固定于所述传动轴上。
16.作为本实用新型的进一步改进,所述支撑座侧面一端与隧道内壁固定,另一端与轨道固定,其底部固定于隧道地面。
17.作为本实用新型的进一步改进,所述巡检机器人还包括其他物资存放区,用于应急节段存放应急物资及设备。
18.作为本实用新型的进一步改进,所述信息搜集与发布模块包括图像搜集装置、语音媒体输入输出装置以及传感器装置;所述执行机构包括自适应配重调节装置、机器人驱动装置、减震装置以及用于辅助拆卸的伸缩装置。
19.作为本实用新型的进一步改进,所述中央控制区主要包括中央控制器、与其连接的io及数据采集模块、驱动器和弱电电源。
20.总体而言,通过本实用新型所构思的以上技术方案与现有技术相比,具有以下有益效果:
21.(1)本实用新型用于城市地下轨道交通隧道的壁挂式巡检机器人,安装于隧道侧壁面,包括设备区、中央控制区、接口扩展区、能源区以及其他物资存放区,各区功能分离,且具有高集成性,取电装置与轨道侧壁滑触式连接,实时取电,机器人的上轮和下轮卡于轨道上下导轨槽中,控制终端控制其沿隧道侧面稳定行走。
22.(2)本实用新型用于城市地下轨道交通隧道的壁挂式巡检机器人,通过可变空气悬架的充气和放气调节,可实现安装拆卸,方便快捷;并且根据自身扩展情况、重心位置、运行车速等工况,可实时自适应调节配重位置,调节整机重心,同时通过蠕动泵改变可变空气悬架夹紧力度,保证移动的平稳性;另外根据地铁车辆的位置情况,可提前通过蠕动泵调节支撑轮的夹紧力度,同时通过伺服驱动改变运行车速,能够保障与地铁车辆错车时安全性。
23.(3)本实用新型用于城市地下轨道交通隧道的壁挂式巡检机器人,设备区安装有自适应配重调节装置,通过设备区内的陀螺仪、压力传感器等监测到机器人实时重心信息后,可实时调整配重位置,保障机器人运行状态,避免在巡检机器人接口扩展区安装机械臂、停放无人机等设备,其他物资存放区放置应急物资及设备时,巡检机器人整体重心偏移,影响高速运行质量。
可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
39.图1为本实用新型实施例的壁挂式巡检机器人分区结构示意图。本实用新型用于城市地下轨道交通隧道的壁挂式巡检机器人,包括设备区1、中央控制区2、接口扩展区4、能源区6以及其他物资存放区5。各区域直接预留电气接口,且均设有开关门,本实用新型的巡检机器人采用模块化设计,各区功能分离,并且可扩展。
40.具体地,设备区(io)用于安装信息搜集与发布模块、通信模块、执行机构等。其中信息搜集与发布模块主要包括摄像头(线阵或面阵)、红外摄像头等图像搜集装置、扬声器等语音媒体输入输出装置、温度、噪声、振动、陀螺仪等传感器装置;通讯模块主要包括wifi、蓝牙、5g、4g、 gprs、通信标签等通信装置;执行机构主要包括自适应配重装置、机器人驱动装置、减震装置、用于辅助拆卸的伸缩装置等执行机构。
41.如图7和图8所示,中央控制区主要包括中央控制器28以及与中央控制器28连接的io及数据采集模块29、驱动器30、弱电电源31;驱动器包括电机驱动、相机驱动其他设备驱动等。中央控制器可实时调整线阵相机的扫描周期以及伺服电机的转速,拍摄-拼接-传输隧道内图像信息。
42.能源区包括储能电池、取电刷等。
43.接口扩展区主要为机器人二次开发预留接口,主要包括机械安装接口和信息通讯接口;其中机械安装接口包括通孔,盲孔,阶梯孔,螺纹孔等机械固定接口,信息通讯接口主要包括usb、rs232、gpib、以太网、802.11 无线接口等通信接口,为后期机器人二次开发安装机械臂以及停放、控制、供能无人机预留接口。
44.其他物资存放区主要用于应急节段存放应急物资及设备用,起到应急阶段向隧道内快速供给的作用。
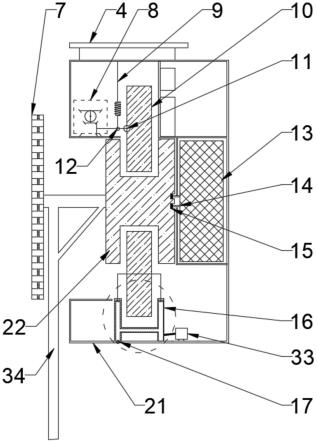
45.图2为本实用新型实施例的壁挂式巡检机器人整体结构示意图。如图1 和图2所示,本实用新型的壁挂式巡检机器人,通过支撑座34实现与隧道内壁7的连接,支撑座34在隧道内间隔设置即可,其底部固定于隧道地面,且其侧面一端与隧道内壁7固定,另一端与巡检机器人的轨道22固定。本实用新型的巡检机器人采用壁挂运行方式,考虑到整车平衡性,整车配置主要集中在轨道根部。
46.轨道22一侧与支撑座34固定,相对的一侧设有滑触线导电槽15,巡检机器人的储能电池13侧面上设有滑触线取电刷14,该取电刷与滑触线导电槽15相匹配,取电刷可沿导电槽滑触式移动。本实用新型的壁挂式巡检机器人,其储能电池引出取电刷,通过能源区孔位与轨道上的导电槽相连,实时取电,实现巡检免停靠充电;当在应急灾害背景下,导电槽失电时,机器人仍可通过自身的储备能源继续工作。
47.巡检机器人上部通过连接件固定有走行轮10(上轮),下部通过连接件固定有支撑轮(下轮),轨道22截面为h型,轨道22顶部和底部分别开设有与走行轮10和支撑轮(下轮)相匹配的导轨槽,巡检机器人的上轮和下轮分别通过上下导轨槽沿隧道纵向移动。
48.支撑轮采用可变空气悬架进行支撑、缓冲、减震。结合图3所示,支撑轮通过支撑推杆19与可变空气悬架16连接,支撑推杆19包括顶杆和固定在顶杆两侧并与其垂直的侧杆,
顶杆穿过支撑轮中心设置的第二轴承18,侧杆底部分别设有活塞20,两侧的活塞20分别位于可变空气悬架内部,并可沿其竖向移动,从而带动支撑轮竖向移动。可变空气悬架16设有气阀17,气阀17优选设于可变空气悬架16与保护外壳21的连接处,同时可变空气悬架16与空气蠕动泵33连接;当机器人需要卸载维修时,只需打开气阀 17,放出气缸内气体后,车轮下方后即可取出机器人。安装时上轮卡入导轨槽后,通过空气蠕动泵33将可变空气悬架气缸充满气,下轮卡入导轨槽后即可完成安装。
49.进一步地,由于支撑轮的竖向位置可调,巡检机器人可在地铁高速错车时自适应调节支撑轮夹紧力。通过通信模块实时获得地铁位置,当地铁高速靠近时,伺服电机降低巡检机器人运行速度,同时空气蠕动泵33提前向可变空气悬架16注入空气,提升对轨道22的夹紧力。
50.本实用新型的壁挂式巡检机器人,通过可变空气悬架的充气和放气调节,可实现安装拆卸,方便快捷;并且根据自身扩展情况、重心位置、运行车速等工况,可实时自适应调节配重位置,调节整机重心,同时通过蠕动泵改变可变空气悬架夹紧力度,保证移动的平稳性;根据地铁车辆的位置情况,可提前通过蠕动泵调节支撑轮的夹紧力度,同时通过伺服驱动改变运行车速,能够保障与地铁车辆错车时安全性。
51.结合图2和图5所示,走行轮10(上轮)优选采用皮带轮主从驱动方式,主动轮和从动轮通过皮带连接,能够保证运行的平稳性,其中主动轮与伺服电机8连接,伺服电机8驱动齿轮26转动,驱动齿轮26通过传动轴与球笼式万向节11连接,驱动主动轮转动,从而带动从动轮以及支撑轮 (下轮)转动。优选地,巡检机器人配置有缓冲减震器9,缓冲减震器9两端为弹簧件,缓冲减震器9一端固定于机器人壳体上,另一端通过第一轴承12固定于上述传动轴上,在机器人驱动行走过程中,起到缓冲减震的作用。
52.进一步如图4所示,巡检机器人设备区1安装有自适应配重调节装置,包括步进电机23、配重24以及滚珠丝杠25,滚珠丝杠25一端与步进电机 23连接,另一端与设备区壳体内部固定,滚珠丝杠25上设有可沿其移动的配重24,当巡检机器人接口扩展区安装机械臂、停放无人机等设备,其他物资存放区放置应急物资及设备时,巡检机器人整体重心偏移,影响高速运行质量。通过设备区内的陀螺仪、压力传感器等监测到机器人实时重心信息后,由控制系统驱动步进电机旋转,带动滚珠丝杠旋转从而实时调整配重位置,保障机器人运行状态。
53.本实用新型的壁挂式巡检机器人,其行走的轨道还可以采用如图6所示的设置形式,轨道直接设置于隧道内壁上,此时轨道需沿隧道壁纵向通长设置,从而为巡检机器人的车轮提供连续的导轨槽。轨道为h形状轨道,轨道靠墙侧宽于离墙侧,为机器人提供空间的,且保障机器人重心在皮带轮范围内,轨道外侧开有两条导电槽,为机器人持续供电。
54.图9为本实用新型实施例的壁挂式巡检机器人整体控制系统示意图。中央控制器与设备区内的摄像头、电机以及各类传感器的驱动电连接,接口扩展区接口也与中央控制器连通,中央控制器与通讯模块电连接,通过通信模块与车站基站通讯,并通过基站将信息传输至服务器,由控制终端进行控制。远程控制终端能够控制机器人的启动;可以将摄像头扫描周期与机器人运行速度耦合,通过通讯模块向控制终端传输隧道内部图片。各车站优选均布置有基站,保障通信的可靠性。
55.本实用新型的用于城市地下轨道交通隧道的壁挂式巡检机器人,其安装及工作过
程如下:
56.将巡检机器人运输至轨道22附近,并将上走行轮10(主从动皮带轮) 卡入轨道导轨槽;
57.将下支撑轮对准轨道下导轨槽,向可变空气悬架16中冲入气体,直至巡检机器人稳定卡入,且气压值达标;
58.可选地,将扩展设备安装至机器人接口扩展区4,并完成联合调试;
59.可选地,将应急物资或应急设备放置于其他物资存放区5;
60.关闭各区舱盖,启动机器人,进行配重24自适应调节;
61.调节完毕后,远程控制终端控制机器人启动运行,开启既定作业,轨道导电槽实时提供电能,摄像头返回实时巡检视频,线阵相机最终返回整个隧道扫描图像,配重装置实时调节,其他扩展装备完成既定任务。
62.本领域的技术人员容易理解,以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1