一种用于火电厂钢结构除锈型机器人的制作方法
1.本实用新型涉及火电厂除锈技术领域,具体为一种用于火电厂钢结构除锈型机器人。
背景技术:
2.火力发电厂简称火电厂,是利用可燃物(例如煤)作为燃料生产电能的工厂。它的基本生产过程是:燃料在燃烧时加热水生成蒸汽,将燃料的化学能转变成热能,蒸汽压力推动汽轮机旋转,热能转换成机械能,然后汽轮机带动发电机旋转,将机械能转变成电能。
3.以燃烧煤炭形式发电的火电厂对大气污染较为严重,导致空气中的so2、co2等酸碱性氧化物含量也较高,加剧了电厂钢结构(特别是锅炉钢结构)的腐蚀老化,现有的锅炉钢结构防腐工作主要依靠人工搭设脚手架或挂设吊笼等方式完成,施工环境复杂,危险性高、人工喷漆工作环境恶劣。
技术实现要素:
4.本实用新型的目的在于提供一种用于火电厂钢结构除锈型机器人,具备用智能机器人取代人工高空攀爬、手工涂覆的传统防腐作业方式,降低工人劳动强度及危险程度、提高施工效率及防腐质量,提升电厂安全文明生产水平的优点,解决了锅炉钢结构防腐工作主要依靠人工搭设脚手架或挂设吊笼等方式完成,施工环境复杂,危险性高、人工喷漆工作环境恶劣的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种用于火电厂钢结构除锈型机器人,包括前本体机构和后本体机构,所述前本体机构和后本体机构相反的一侧均通过轴承活动连接有滚轮机构,所述前本体机构和后本体机构内腔的顶部焊接有驱动机构,所述前本体机构内腔的底部通过螺栓连接有伸缩机构,所述前本体机构顶部的前后两侧分别通过螺栓连接有探测机构和吊绳收放装置。
6.优选的,所述前本体机构包括前本体,所述前本体的前侧通过螺栓连接有安装臂。
7.优选的,所述后本体机构包括后本体,所述后本体的前侧通过螺栓连接有电动摆杆。
8.优选的,所述探测机构包括固定杆,所述固定杆后侧的顶部通过螺栓连接有超声波传感器。
9.优选的,所述滚轮机构包括转杆,上下两个转杆相对的一侧均固定套设有从动锥齿轮,所述转杆远离从动锥齿轮的一侧焊接有支撑架,所述支撑架底部的上下两侧均通过轴承活动连接有滚轮。
10.优选的,所述驱动机构包括竖板,所述竖板的左侧通过螺栓连接有第一电机,所述第一电机的输出端固定连接有安装杆,所述安装杆的表面套设有主动锥齿轮。
11.优选的,所述伸缩机构包括第二电机和导向杆,所述第二电机的输出端固定连接有丝杠,所述丝杠和导向杆的底部均贯穿至后本体机构的内腔,所述丝杠的表面螺纹套设
有连接套管,所述连接套管的表面与后本体机构固定连接,所述导向杆的表面与后本体机构滑动连接。
12.优选的,所述前本体机构和后本体机构的后侧均通过螺栓连接有盖板,所述后本体机构内腔的前侧通过螺栓连接有处理器,所述处理器的输出端分别与驱动机构、伸缩机构和吊绳收放装置的输入端电性连接,所述处理器的输入端与探测机构电性连接。
13.与现有技术相比,本实用新型的有益效果如下:
14.本实用新型通过前本体机构、电动摆杆、后本体、吊绳收放装置、盖板、超声波传感器、固定杆、滚轮、支撑架、转杆、从动锥齿轮、第二电机、丝杠、连接套管、导向杆、处理器、主动锥齿轮、安装杆、竖板和第一电机的配合使用,具备用智能机器人取代人工高空攀爬、手工涂覆的传统防腐作业方式,降低工人劳动强度及危险程度、提高施工效率及防腐质量,提升电厂安全文明生产水平的优点,值得推广。
附图说明
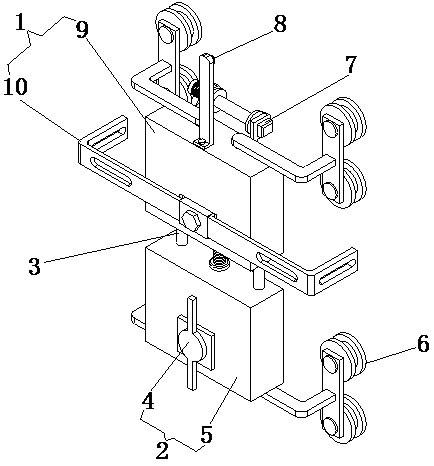
15.图1为本实用新型结构的轴测图;
16.图2为本实用新型结构的后视轴测图;
17.图3为本实用新型局部结构的后视示意图。
18.图中:1前本体机构、2后本体机构、3伸缩机构、4电动摆杆、5后本体、6滚轮机构、7吊绳收放装置、8探测机构、9前本体、10安装臂、11盖板、12超声波传感器、13固定杆、14驱动机构、15滚轮、16支撑架、17转杆、18从动锥齿轮、19第二电机、20丝杠、21连接套管、22导向杆、23处理器、24主动锥齿轮、25安装杆、26竖板、27第一电机。
具体实施方式
19.请参阅图1-图3,一种用于火电厂钢结构除锈型机器人,包括前本体机构1和后本体机构2,前本体机构1和后本体机构2相反的一侧均通过轴承活动连接有滚轮机构6,前本体机构1和后本体机构2内腔的顶部焊接有驱动机构14,前本体机构1内腔的底部通过螺栓连接有伸缩机构3,前本体机构1顶部的前后两侧分别通过螺栓连接有探测机构8和吊绳收放装置7;
20.前本体机构1包括前本体9,前本体9的前侧通过螺栓连接有安装臂10;
21.后本体机构2包括后本体5,后本体5的前侧通过螺栓连接有电动摆杆4;
22.探测机构8包括固定杆13,固定杆13后侧的顶部通过螺栓连接有超声波传感器12;
23.滚轮机构6包括转杆17,上下两个转杆17相对的一侧均固定套设有从动锥齿轮18,转杆17远离从动锥齿轮18的一侧焊接有支撑架16,支撑架16底部的上下两侧均通过轴承活动连接有滚轮15;
24.驱动机构14包括竖板26,竖板26的左侧通过螺栓连接有第一电机27,第一电机27的输出端固定连接有安装杆25,安装杆25的表面套设有主动锥齿轮24;
25.伸缩机构3包括第二电机19和导向杆22,第二电机19的输出端固定连接有丝杠20,丝杠20和导向杆22的底部均贯穿至后本体机构2的内腔,丝杠20的表面螺纹套设有连接套管21,连接套管21的表面与后本体机构2固定连接,导向杆22的表面与后本体机构2滑动连接;
26.前本体机构1和后本体机构2的后侧均通过螺栓连接有盖板11,后本体机构2内腔的前侧通过螺栓连接有处理器23,处理器23的输出端分别与驱动机构14、伸缩机构3和吊绳收放装置7的输入端电性连接,处理器23的输入端与探测机构8电性连接;
27.通过设置盖板11,能够方便对后本体5和前本体9内的零部件进行拆装;
28.通过设置导向杆22,能够限制后本体5的移动方向;
29.第二电机19为步进电机,可以精确控制丝杠20转动角度,通过丝杠20旋转带动后本体作直线运动,步进电机体积小可与丝杠20集成为直线丝杆电机;
30.第一电机27为无刷直流电机,无刷直流电机采用电子部件代替传统电刷换相器,保留了直流电机的优良调速特性,低速力矩大、调速范围宽,电机体积小、效率高,同时克服了直流电机电刷容易打火、寿命短、维护复杂等缺点。
31.使用时,把本机器人外接电源和外接远程控制器,控制处理器23发出信号控制上下两个第一电机27工作分别带动安装杆25表面的主动锥齿轮24正转和反转,上方正转的主动锥齿轮24通过上方的从动锥齿轮18和转杆17带动支撑架16底部的滚轮15向前移动,下方正转的主动锥齿轮24反转带动下方支撑架16底部的滚轮15向前侧移动,然后把本机器人放在钢结构表面,控制第一电机27工作使上下的滚轮15复位,此时左右两侧的滚轮15表面的凹槽卡在工字钢翼板的边缘处,这样滚轮15可以在钢结构表面滚动,把吊绳收放装置7表面吊绳的一段绑在钢结构的顶部,当需要本机器人进行缩短或伸长时,控制第二电机19工作带动丝杠20正转或反转,正转或反转的丝杠20会使后本体5在导向杆22表面上下移动,从而实现后本体5靠近或远离前前本体9,实现机器人缩短或伸长,然后把除锈或喷漆设备安装在安装臂10上,此时控制吊绳收放装置7工作对吊绳进行收卷,本机器人带动安装臂10上的除锈或喷漆设备向上移动进行除锈工作,当在向上移动的过程中,超声波传感器12检测到工字钢表面出现障碍时,超声波传感器12把信号传递给处理器23,处理器23控制前本体9内的第一电机27工作带动前本体9内的主动锥齿轮24正转,正转的主动锥齿轮24通过从动锥齿轮18和转杆17带动支撑架16底部的滚轮15向前移动离开钢结构,这样钢结构表面的障碍不会对滚轮15造成影响,当前本体9越过障碍后,再控制前本体9内的第一电机27工作带动主动锥齿轮24反转,反转的主动锥齿轮24使滚轮15复位,重新卡在钢结构边缘处,然后处理器23在控制后本体5内的第一电机27反转,反转的第一电机27使后本体5两侧滚轮15向前移动远离钢结构,当后本体5越过障碍后,在控制第一电机27带动主动锥齿轮24正转,正转的主动锥齿轮24使后本体5两侧的滚轮15复位重新卡在钢结构边缘处,这样即可自动规避障碍,使用智能机器人取代人工高空攀爬、手工涂覆的传统防腐作业方式,降低工人劳动强度及危险程度、提高施工效率及防腐质量,提升电厂安全文明生产水平。
32.综上所述:该用于火电厂钢结构除锈型机器人,通过前本体机构1、电动摆杆4、后本体5、吊绳收放装置7、盖板11、超声波传感器12、固定杆13、滚轮15、支撑架16、转杆17、从动锥齿轮18、第二电机19、丝杠20、连接套管21、导向杆22、处理器23、主动锥齿轮24、安装杆25、竖板26和第一电机27的配合使用,解决了锅炉钢结构防腐工作主要依靠人工搭设脚手架或挂设吊笼等方式完成,施工环境复杂,危险性高、人工喷漆工作环境恶劣的问题。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1