一种服务机器人的制作方法
1.本技术涉及机器人技术领域,特别涉及一种服务机器人。
背景技术:
2.随着车辆保有率增加,人们办理交管业务的次数也显著增加。目前交管业务通常由人工办理,人工办理不仅效率较低,而且需要消耗大量人力,交管服务已经成为我国交通事业发展的瓶颈。
3.因此,如何提供一种能够用于交管服务的服务机器人是本领域技术人员急需解决的技术问题。
技术实现要素:
4.本技术的目的是提供一种服务机器人,其通过身份证识别装置识别办事者的身份证,并通过人脸识别装置获取人脸图像,运算装置通过触摸屏与使用者交互,完成交管业务。
5.为实现上述目的,本技术提供一种服务机器人,包括头部和躯干,头部与躯干的上部相连,头部中设有身份证识别装置,躯干的前侧设有触摸屏和人脸识别装置,躯干内部设有运算装置,身份证识别装置、人脸识别装置以及触摸屏均与运算装置相连。
6.在一些实施例中,躯干内设有运动控制装置和移动装置,躯干外侧设有导航装置,导航装置和移动装置均与运动控制装置相连。
7.在一些实施例中,导航装置包括激光雷达和/或导航摄像头。
8.在一些实施例中,移动装置包括底盘,底盘上设有轮毂电机,底盘还设有与轮毂电机配合的万向轮。
9.在一些实施例中,导航装置包括导航摄像头,人脸识别装置和导航摄像头均为3d摄像头。
10.在一些实施例中,运动控制装置包括下位机,导航装置和轮毂电机均与控制装置相连。
11.在一些实施例中,底盘上设有供能装置,供能装置包括蓄电池和充电机构,蓄电池设置在底盘上,充电机构与蓄电池相连。
12.在一些实施例中,运动控制装置还包括用以连接网络的连接机构,连接机构与下位机相连。
13.在一些实施例中,躯干的上部设有用以发出语音信息的音频输入机构和用以接收使用者语音的音频输入机构。
14.在一些实施例中,音频输出机构为扬声器,音频输入机构为麦克风阵列。
15.本技术所提供的服务机器人,包括头部和躯干,头部与躯干的上部相连,头部中设有身份证识别装置,躯干的前侧设有触摸屏和人脸识别装置,躯干内部设有运算装置,身份证识别装置、人脸识别装置以及触摸屏均与运算装置相连。
16.工作过程中,身份证识别装置能够识别办事者的身份证,人脸识别装置可获取办事者的人脸图像,运算装置将办事者的人脸图像与身份证进行对比。识别确认后,运算装置通过触摸屏与办事者交互,配合办事者完成交管业务。
附图说明
17.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
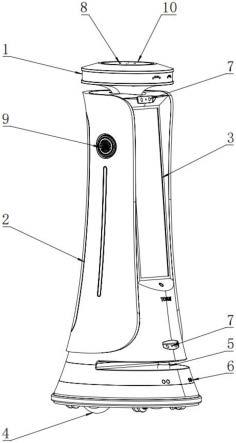
18.图1为本技术所提供的服务机器人一种具体实施方式的结构示意图;
19.图2为图1中服务机器人内部的结构示意图。
20.其中,图1和图2中的附图标记为:
21.头部1、躯干2、触摸屏3、移动装置4、激光雷达5、超声波雷达6、3d摄像头7、麦克风阵列8、扬声器9、身份证读卡器10、无线充电器11、蓄电池12、下位机13、路由器14、上位机15、底盘16、万向轮17、轮毂电机18。
具体实施方式
22.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
23.为了使本技术领域的技术人员更好地理解本技术方案,下面结合附图和具体实施方式对本技术作进一步的详细说明。
24.请参考图1和图2,图1为本技术所提供的服务机器人一种具体实施方式的结构示意图;图2为图1中服务机器人内部的结构示意图。
25.本技术所提供的服务机器人,结构如图1所示,包括头部1和躯干2。服务机器人还包括身份证识别装置、人脸识别装置、触摸屏3以及运算装置。其中,头部1的顶端为识别平面,身份识别装置设置在头部1内、并位于识别平面下方。头部1与躯干2的上端相连,人脸识别装置设置在躯干2的上部,触摸屏3设置在躯干2的前侧,人脸识别装置位于触摸屏3的上方。触摸屏3可用于满足办事者自主信息查询及内容展示。身份证识别装置、人脸识别装置以及触摸屏3均与运算装置相连,身份证识别装置可具体为身份证读卡器10,身份证读卡器10通过磁卡感应,能够快速的识别身份证的真伪和用户信息采集,身份证读卡器10的结构可参考现有技术,在此不再赘述。人脸识别装置可具体为识别摄像头,识别摄像头可拍摄办事者的人脸图像。身份证读卡器10读取办事者的身份证信息后将其传输给运算装置,识别摄像头拍摄得到人脸图像后也传输给运算装置,运算装置可对比人脸图像和身份证信息,进行信息核实。运算装置识别人脸图像的方法以及对比人脸图像和身份证信息的方法可参考现有技术,在此不再赘述。本技术主要在于保护各个部件以及各部件之间的连接关系、位置关系。
26.头部1的侧面设有显示屏,显示屏也与运算装置相连,运算装置可具体为上位机
15,上位机15的结构可参考现有技术中的工控机、plc控制器等。显示屏可多种表情提高服务机器人的亲近性。头部1与躯干2的上部可转动的连接,躯干2中可设置舵机,舵机能够带动头部1转动。头部1可选的转动范围为180
°
,当然用户也可根据需要自行设置头部1的转动范围,头部1与躯干2之间也可采用其他方式实现相对转动,在此不做限定。头部1与躯干2之间的连接方式可参考现有技术,例如通过圆柱滚子轴承相连等,在此不做限定。
27.在一些实施例中,躯干2内设有移动装置4和运动控制装置。躯干2外侧设有导航装置,如图1所示,导航装置可设置在躯干2的前侧,用于检测服务机器人前侧的环境。导航装置和移动装置4均与运动控制装置相连,导航装置将检测到的服务机器人前侧的环境传输给运动控制装置,运动控制装置根据环境规划移动路线,并控制移动装置4沿路线移动。运动控制装置规划移动路线的方法和控制移动装置4移动的方法可参考现有技术,在此不再赘述。
28.在一些实施例中,导航装置可包括激光雷达5、超声波雷达6和导航摄像头。如图1所示,激光雷达5位于躯干2前侧的下部,超声波雷达6位于激光雷达5的下方,触摸屏3位于激光雷达5的上方,导航摄像头位于激光雷达5和触摸屏3之间。运动控制装置包括下位机13,下位机13可采用激光slam(simultaneous localization and mapping同步定位与地图构建)建图技术,实现区域轮廓基础建图,通过实时路径规划算法,完成行动路线规划,并引导服务机器人运动,激光slam建图技术可参考现有技术,在此不再赘述。当然,用户也可采用其他规划路线的方法,导航装置也可采用其他检测装置,在此不做限定。下位机13可参考现有技术中的工控机、plc控制器等。
29.在一些实施例中,移动装置4包括底盘16和轮毂电机18,轮毂电机18设置在底盘16上,轮毂电机18运行能够带动服务机器人移动。如图2所示,底盘16的下侧设有万向轮17。轮毂电机18运行时,万向轮17能够配合轮毂电机18移动,并在轮毂电机18转向时配合转向。底盘16上方设有安装架,运动控制装置设置在安装架上。躯干2的外壳也安装在底盘16上,安装方式可参考现有技术。本技术的一种具体实施方式中,轮毂电机18为6.5寸轮毂电机18,6.5寸轮毂电机18结构较为小巧,设置在服务机器人下部隐蔽性更好。6.5寸轮毂电机18具体为2台,分别设置在底盘16的两侧,万向轮17和2台6.5寸轮毂电机18之间可呈矩形分布或三角形分布,使服务机器人具有更好的稳定性。2台6.5寸轮毂电机18配合工作能够保证服务机器人能够行驶的稳定性,同时具有通过地毯、低门槛等物理障碍的能力。用户也可根据需要采用其他尺寸的轮毂电机18,在此不做限定。当然,移动装置4也可采用其他方式驱动,例如采用滚轮与电机配合、履带与电机配合等,在此不做限定。
30.在一些实施例中,人脸识别装置和导航摄像头均采用3d摄像头7,3d摄像头7能够检测出拍摄空间的距离信息,方便进行建图。如图1所示,用于人脸识别装置的3d摄像头7设置在触摸屏3的上方,用于导航摄像头的3d摄像头7设置在触摸屏3的下方。用户也可根据需要设置3d摄像头7的位置,在此不做限定。
31.在一些实施例中,底盘16上设有供能装置。如图2所示,供能装置包括蓄电池12和充电机构,蓄电池12安装在底盘16上,充电机构设置在蓄电池12上方,并蓄电池12相连,充能机构可对蓄电池12进行充电。充能机构可具体为无线充电器11,无线充电器11与无线充能线圈等配合对蓄电池12进行充电。无线充电器11的结构可参考现有技术,在此不再赘述。当然,用户也可根据需要采用有线充电器,在此不做限定。
32.在一些实施例中,运动控制装置还包括连接机构,连接机构用于连接网络、且连接机构与下位机13相连,操作人员可通过连接机构对服务机器人进行远程控制。连接机构可用于连接互联网,也可用于连接局域网等,在此不做限定。本技术的一种具体实施方式中连接机构为路由器14,具体为5g路由器,操作人员可通过5g网络控制服务机器人。如图2所示,5g路由器设置在上位机15的上方,上位机15也可与5g路由器相连,并通过网络进行数据的备份、更新等操作。用户也可采用现有技术中其他的连接机构,在此不做限定。
33.在一些实施例中,躯干2的上部设有音频输入机构和音频输出机构,音频输出机构可发出语音信息,配合、辅助办事者进行操作。音频输入机构可接收使用者语音,并根据办事者的语音信息进行操作。音频输入机构和音频输出机构均与上位机15相连,并在上位机15的控制下运行,音频输入机构和音频输出机构的控制方式可参考现有技术,在此不再赘述。
34.在一些实施例中,音频输出机构为扬声器9,如图1所示,扬声器9为2个,且分别设置在躯干2的两侧。音频输入机构为麦克风阵列8,麦克风阵列8设置在头部1的顶端。用户也可根据需要选择音频输入机构和音频输出机构的种类和分布方式,在此不做限定。
35.本实施例中,服务机器人通过身份证读卡器10读取办事者身份证的信息,并通过3d摄像头7拍摄办事者的人脸图像,上位机15根据身份证信息和人脸图像进行人脸识别,并通过触摸屏3与办事者交互完成业务办理。服务机器人还设置了移动装置4、运动控制装置和导航装置,三者配合使服务机器人可靠近办事者,进而提高服务质量。服务机器人还设置了麦克风阵列8和扬声器9,通过语音配合办事者办理业务,进一步提高了办事效率。
36.需要说明的是,在本说明书中,诸如第一和第二之类的关系术语仅仅用来将一个实体与另外几个实体区分开来,而不一定要求或者暗示这些实体之间存在任何这种实际的关系或者顺序。
37.以上对本技术所提供的服务机器人进行了详细介绍。本文中应用了具体个例对本技术的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本技术的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本技术原理的前提下,还可以对本技术进行若干改进和修饰,这些改进和修饰也落入本技术权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1