一种钻孔机器人的制作方法
1.本实用新型涉及钻孔设备技术领域,特别涉及一种钻孔机器人。
背景技术:
2.近年来,随着科技的发展,工程机械得到了广泛的应用。在不同技术领域也研制出多种不同类型的钻孔枪来加快人工,从而实现高效工作。但在实际的应用中,我们常常会面对不同领域的大面积、多方位、多角度、多层次的工作需求,出现工作难度加大、工作效率降低等。
3.此时,传统的人工钻孔枪往往会受限于其人工钻孔的位置不够精确或者由于震动导致钻孔位置偏移等情况从而不能顺利展开作业。而我们的钻孔机器人在作业方面,可以利用多轴机械臂的灵活运动进行高精度的钻孔,可以运用在各种所需打孔的建筑业方面,并且可以24小时实现高效作业。
技术实现要素:
4.本实用新型提出了一种钻孔机器人,通过“六轴机械臂+钻孔枪”的独特方式对墙面进行钻孔,解放人工的同时,能自动定位钻孔的位置和保证了高精度的钻孔质量。
5.本实用新型的技术方案是这样实现的:
6.一种钻孔机器人,包括钻孔枪、红外深度相机、六轴机械臂和行走装置,所述钻孔枪的枪身上方设有所述的红外深度相机,所述钻孔枪的下部与六轴机械臂的首端固定连接,所述六轴机械臂用于调节钻孔枪的位置,所述六轴机械臂的尾端与行走装置固定连接;
7.所述红外深度相机包括摄像头、ccd图像传感器和红外发射器,所述摄像头与所述ccd图像传感器和红外发射器电性连接,所述ccd图像传感器设于红外深度相机内部,所述摄像头和红外线发射器均朝向所述钻孔枪的钻头的正上方;
8.所述行走装置包括底盘支架和履带,以及设于底盘支架前方两侧的导向轮和设于底盘支架后方两侧的驱动轮,分布于所述底盘支架一侧的导向轮与驱动轮通过所述履带啮合连接。
9.进一步地,所述钻孔机器人还包括连接件,所述连接件固定于所述六轴机械臂的首端,并与所述钻孔枪采用螺纹连接。
10.进一步地,所述钻孔机器人还包括支撑杆,所述六轴机械臂通过支撑杆与底盘支架固定连接。
11.进一步地,所述钻孔枪还包括电机,所述电机安装在所述钻孔枪的枪身前端,所述电机的输出轴与所述钻头固定连接。
12.进一步地,所述钻孔枪的枪身下方还设有用于控制钻孔枪工作状态的开关。
13.本实用新型的有益效果:本实用新型采用“六轴机械臂+钻孔枪”的方式,可以利用六轴机械臂的灵活运动进行高精度的钻孔,通过连接件搭配不同规格钻头的钻孔枪,利用红外深度相机进行墙体标识点的识别,实现在不同的建筑业场合进行大面积、多方位、多角
度的精确钻孔工作;通过设置摄像头、ccd图像传感器和红外线发射器对标识点进行定位,通过摄像头扫描墙体获得施工场景图像信息,ccd图像传感器识别墙面的标记点,红外发射器发射出的红外线确定钻头与标记点的距离,通过六轴机械臂调整钻头与标识点的位置,钻孔枪对标识点进行钻孔。
附图说明
14.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
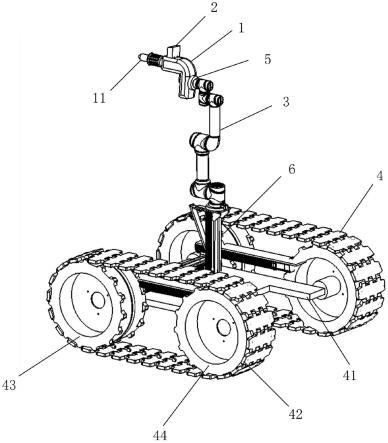
15.图1为本实用新型的结构示意图;
16.图2为本实用新型的侧面结构示意图;
17.图3为本实用新型除去行走装置的结构示意图;
18.图4为本实用新型的红外深度相机结构示意图。
19.图中:1-钻孔枪,11-钻头,12-电机,13-开关,2-红外深度相机,21-摄像头,22-红外线发射器,3-六轴机械臂,4-行走装置,41-底盘支架,42-履带,43-导向轮,44-驱动轮,5-连接件,6-支撑杆。
具体实施方式
20.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
21.参照图1-4,一种钻孔机器人,包括钻孔枪1、红外深度相机2、六轴机械臂3和行走装置4,钻孔枪1的枪身上方设有的红外深度相机2,钻孔枪1的下部与六轴机械臂3的首端固定连接,六轴机械臂3用于调节钻孔枪1的位置,六轴机械臂3的尾端与行走装置4固定连接;红外深度相机2包括摄像头21、ccd图像传感器(图中未示出)和红外发射器22,ccd图像传感器设于红外深度相机内部,摄像头21与ccd图像传感器和红外发射器22电性连接,摄像头21和红外线发射器22均朝向钻孔枪1的钻头11的正上方;行走装置4包括底盘支架41和履带42,以及设于底盘支架41前方两侧的导向轮43和设于底盘支架41后方两侧的驱动轮44,分布于底盘支架41一侧的导向轮43与驱动轮44通过履带42啮合连接。
22.优选地,钻孔机器人还包括连接件5,连接件5固定于六轴机械臂3的首端,并与钻孔枪1采用螺纹连接。具体地,在六轴机械臂3和钻孔枪1之间设有一个连接件5,连接件5仅用于固定六轴机械臂3和钻孔枪1,采用螺纹连接,较为稳定,且钻孔枪1可进行拆卸,更换不同规格钻头11的钻孔枪1,通过连接件5稳定连接,整体钻孔机器人不易抖动。
23.优选地,钻孔机器人还包括支撑杆6,六轴机械臂3通过支撑杆6与底盘支架41固定连接。具体地,钻孔机器人在使用钻孔枪1的时候,通过履带42的减震和支撑杆6的稳定结构从而实现钻孔时不易晃动,能够精确实现在钻孔制造行业制出高精度的孔和各类建筑物的制造、钻孔。
24.优选地,钻孔枪1还包括电机12,电机12安装在钻孔枪1的枪身前端,电机12的输出轴与钻头11固定连接。
25.优选地,钻孔枪1的枪身下方还设有用于控制钻孔枪1工作状态的开关13。
26.具体地,红外深度相机2用于识别标记点,红外深度相机2通过摄像头21扫描墙体,获取场景图像信息,为钻孔机器人视觉在更多场景的应用提供可能,ccd图像传感器可识别墙面的标记点,通过红外发射器22发射出的红外线到标记点,红外发射器22通过红外光束的返回的散斑之间的几何关系计算距离,驱动轮44和导向轮43带动履带42运行到离标记点预定的位置,再通过六轴机械臂3进行伸缩旋转控制钻孔枪1,钻头11离标记点等于所规定的距离时,钻孔枪1开始工作,这样的钻孔机器人能够在不同的场合进行大面积、多方位、多角度的精确工作。
27.具体地,钻孔机器人通过履带42行走到距离标记点一定的位置时,六轴机械臂3就会微调钻头11的位置。
28.本实用新型将钻孔枪1送到预定的钻孔标记点,红外深度相机2扫描并计算距离后,到达钻孔的标记点,钻孔枪1开始钻孔,完成钻孔后,钻孔机器人就会到下一个标记点进行钻孔,重复以上动作直至完成所有钻孔点的钻孔,本钻孔机器人可以用于多种场合下的钻孔,还可以通过更换可更换钻头来把控不同大小的钻孔,从而起到方便、快捷、高精度的效果。
29.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1