一种基于机械手的防碰撞检测装置的制作方法
1.本实用新型属于机械手自动检测技术领域,尤其涉及一种基于机械手的防碰撞检测装置
背景技术:
2.现有技术中通过无机械手干涉信号及位置检测,按动段取按钮后可直接进行段取操作,由于位置不良会造成两个机械手相撞,造成机械部件损坏及机械手精度偏差。现有的自动段取设备由于机械手记忆问题及位置问题,在段取过程中两个机械手发生干涉相撞,造成机械手整体部件损坏及整体变形损坏。现有的设备段取设计有缺陷,无自主检测,机械手在段取中经常发生两手相撞情况,操作过于简便容易出现错误。
技术实现要素:
3.为克服相关技术中存在的问题,本实用新型公开实施例提供了一种基于机械手的防碰撞检测装置。所述技术方案如下:
4.该基于机械手的防碰撞检测装置设置有:
5.段取机械手本体;
6.所述段取机械手本体通过连接线路连接有检测按钮判定装置,所述检测按钮判定装置通过连接线路与plc控制器连接;
7.所述段取机械手本体与plc控制器分别通过连接线路与动力配电箱连接。
8.在一个实施例中,所述检测按钮判定装置设置有检测按钮,所述检测按钮通过连接线路连接有段取指示灯。
9.在一个实施例中,所述段取机械手本体上端设置有连接部,所述连接部下端固定连接有固定板。
10.在一个实施例中,段取机械手本体上端设置有连接部,所述连接部的上端安装有多个幅宽检知件,所述连接部的下端对称安装有直角支架,所述直角支架的内侧安装有干涉检知件,所述直角支架与连接部之间活动安装有丝杠固定架,所述直角支架的下端安装有气缸,所述气缸的上端安装有三棱棍,所述气缸的输出端安装有辅助支架。
11.结合上述的所有技术方案,本实用新型所具备的优点及积极效果:
12.1、本实用新型通过对plc的改造,现将机械手检测连锁条件信号点加入到段取条件回路内,在操作方法上也进行改造,从之前的按一个钮直接段取改为先按检测按钮,通过检测判定无危险后段取指示灯亮起,再次按段取按钮才可进行动作,如检测到动作轨迹有干涉后无法进行下一步段取操作。
13.2、本实用新型可以防止操作人员的误操作,通过段取机械手本体内部信号与ap部整体的联锁关系通过plc回路来进行此项安全设计,设计安全回路前段取出现干涉概率为0.5%左右,机械手部件频繁进行更换,每日段取10次左右,现修改次安全检测回路后安全段取达到100%,未发生过机械手干涉相撞异常。
14.3、本实用新型的信号点调查及经过反复故障总结的经验;并且自动段取实施后两个机械手不发生干涉,相撞造成机械手部件的损坏及设备重故障的发生,改造后此故障发生率为“0”15.附图说明
16.此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本公开的实施例,并与说明书一起用于解释本公开的原理。
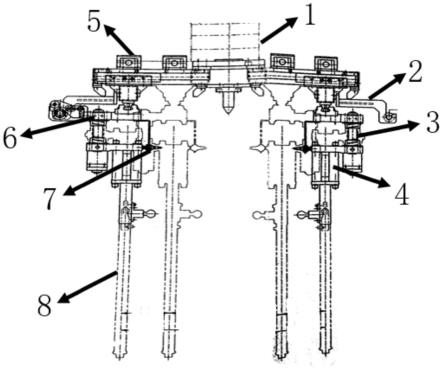
17.图1是本实用新型实施例提供的基于机械手的防碰撞检测装置的结构示意图。
18.图2是本实用新型实施例提供的基于机械手的防碰撞检测装置的工作原理图。
19.图3是本实用新型实施例提供的基于机械手的防碰撞检测装置的梯形图。
20.图中:1、连接部;2、丝杠固定架;3、三棱棍;4、气缸;5、幅宽检知件;6、直角支架;7、干涉检知件;8、辅助支架。
具体实施方式
21.为使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合附图对本实用新型的具体实施方式做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本实用新型。但是本实用新型能够以很多不同于在此描述的其他方式来实施,本领域技术人员可以在不违背本实用新型内涵的情况下做类似改进,因此本实用新型不受下面公开的具体实施的限制。
22.该基于机械手的防碰撞检测装置利用设备机器的plc进行整体安全监测功能,通过cpu内部程序回路,i/o模块之间相互信号传输,对段取操作的过程变更,追加安全检测按钮,按住检测按钮后机械手根据内置信号点进行自主检测安全后,段取可指示灯亮起,在按段取启动按钮后可进行自动段取操作,这样既保护了机械手的安全性也保护了设备防止了操作人员的误操作。通过plc及各部的相互通讯连锁对plc进行修改,追加机械手自检功能,同时对操作方法进行修改,这样可以在安全的前提下进行段取,杜绝了机械手干涉及相撞。段取机械手本体上端设置有连接部1,所述连接部1的上端安装有多个幅宽检知件5,所述连接部1的下端对称安装有直角支架6,所述直角支架6的内侧安装有干涉检知件7,所述直角
支架6与连接部1之间活动安装有丝杠固定架2,所述直角支架6的下端安装有气缸4,所述气缸4的上端安装有三棱棍3,所述气缸4的输出端安装有辅助支架8。检测按钮判定装置设置有检测按钮,所述检测按钮通过连接线路连接有段取指示灯。连接部1下端固定连接有固定板。
23.首先对机械手本体内部信号进行调查确认,在最安全的位置时,内部信号点及plc接点信号进行调查确认;其实对机械手与ap之间连锁信号点进行调查,通过ap部信号点确认后将信号点追加安全回路设计,将安全信号点追加到自动段取条件回路内。基于机械手的防碰撞检测装置包括段取机械手本体、检测按钮判定装置和plc控制器。plc控制器,用于将机械手检测连锁条件信号点加入到段取条件回路内;检测按钮判定装置,与plc控制器连接,用于在进行段取时,先判定检测按钮有无危险信号,再确定是否进行下一步段取操作;机械手,与检测按钮判定装置连接,用于执行判定检测按钮无危险信号,确定进行下一步段取操作指令。
24.段取机械手本体通过内部位置信号进行内部连锁通讯,机械手位置错乱后由于记忆关系会造成机械手不按照机械手轨迹进行动作,容易发生干涉碰撞等异常现象,追加检测按钮判定装置后机械手在标准固定位置后才可以实施段取动作,以上异常现象不会发生,自改造后1次异常未再发。杜绝了机械手部件的品番损坏及更换。
25.以上所述,仅为本实用新型较优的具体的实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,都应涵盖在本实用新型的保护范围之内。
技术特征:
1.一种基于机械手的防碰撞检测装置,其特征在于,所述基于机械手的防碰撞检测装置设置有:段取机械手本体;所述段取机械手本体通过连接线路连接有检测按钮判定装置,所述检测按钮判定装置通过连接线路与plc控制器连接;所述段取机械手本体与plc控制器分别通过连接线路与动力配电箱连接。2.根据权利要求1所述的基于机械手的防碰撞检测装置,其特征在于,所述检测按钮判定装置设置有检测按钮,所述检测按钮通过连接线路连接有段取指示灯。3.根据权利要求1所述的基于机械手的防碰撞检测装置,其特征在于,所述段取机械手本体上端设置有连接部,所述连接部下端固定连接有固定板。4.根据权利要求1所述的基于机械手的防碰撞检测装置,其特征在于,段取机械手本体上端设置有连接部(1),所述连接部(1)的上端安装有多个幅宽检知件(5),所述连接部(1)的下端对称安装有直角支架(6),所述直角支架(6)的内侧安装有干涉检知件(7),所述直角支架(6)与连接部(1)之间活动安装有丝杠固定架(2),所述直角支架(6)的下端安装有气缸(4),所述气缸(4)的上端安装有三棱棍(3),所述气缸(4)的输出端安装有辅助支架(8)。
技术总结
本实用新型属于机械手自动检测技术领域,公开了一种基于机械手的防碰撞检测装置,段取机械手本体通过连接线路连接有检测按钮判定装置,所述检测按钮判定装置通过连接线路与PLC控制器连接;段取机械手本体与PLC控制器分别通过连接线路与动力配电箱连接,检测按钮判定装置设置有检测按钮,所述检测按钮通过连接线路连接有段取指示灯。本实用新型通过对PLC的改造,现将机械手检测连锁条件信号点加入到段取条件回路内,在操作方法上也进行改造,从之前的按一个钮直接段取改为先按检测按钮,通过检测判定无危险后段取指示灯亮起,再次按段取按钮才可进行动作,如检测到动作轨迹有干涉后无法进行下一步段取操作。后无法进行下一步段取操作。后无法进行下一步段取操作。
技术研发人员:纪文斌 周承喆 张涛
受保护的技术使用者:一汽丰田汽车有限公司
技术研发日:2022.06.10
技术公布日:2022/9/22
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1