机械臂安装座的制作方法
1.本实用新型涉及机器人的技术领域,具体是指一种机械臂安装座。
背景技术:
2.工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器,它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。
3.但相关的工业机器人的机械臂安装座在高度上往往是固定不变的,导致安装座功能单一,适用性差,无法根据机械臂的安装需求或工作要求对安装座进行高度控制。
技术实现要素:
4.本实用新型旨在至少在一定程度上解决相关技术中的技术问题之一。
5.为此,本实用新型的目的在于提供一种机械臂安装座,可根据机械臂的安装需求或工作要求对安装座进行有效的高度控制,提高适用性。
6.为达到上述目的,本实用新型第一方面实施例提出了一种机械臂安装座,包括底座、箱体、支撑轴、支撑组件、花键轴、升降机构、传动机构和驱动装置,其中,所述箱体具有底口,所述箱体的底口端可拆卸地设置在所述底座上;所述支撑轴设置在所述箱体内,且所述支撑轴的一端与所述底座活动相连,所述支撑轴的另一端延伸至所述箱体顶壁下方,其中所述支撑轴上开设有花键槽;所述支撑组件设置在所述箱体的上方;所述花键轴的一端与所述支撑组件相连,所述花键轴的另一端与所述花键槽相配合;所述升降机构设置在所述箱体内,所述升降机构分别与所述支撑组件和所述箱体相连;所述传动机构设置在所述箱体内,且所述传动机构的一端与所述箱体活动相连,所述传动机构的另一端与所述支撑轴相连;所述驱动装置的一端与所述箱体相连,所述驱动装置的另一端与所述传动机构相连。
7.本实用新型的机械臂安装座,可根据机械臂的安装需求或工作要求对安装座进行有效的高度控制,提高适用性。
8.另外,根据本实用新型上述提出的机械臂安装座还可以具有如下附加的技术特征:
9.具体地,所述支撑组件包括托盘、支撑座和多个滚珠,其中,所述托盘可活动地设置在所述箱体的顶壁上;所述支撑座设置在所述托盘的上方,且所述支撑座的底壁与所述花键轴的顶端固定相连;多个所述滚珠可滚动地设置在所述托盘和所述支撑座之间,且多个所述滚珠环绕所述花键轴设置。
10.具体地,所述升降机构包括支撑环、液压缸及多个导向杆,其中,所述支撑环套设在所述支撑轴上;多个所述导向杆环绕所述支撑轴设置,且每个所述导向杆的一端与所述支撑环顶壁相连,每个所述导向杆的另一端贯穿所述箱体顶壁并与所述托盘底壁相连;所
述液压缸的一端与所述箱体的内腔顶壁相连,所述液压缸的另一端与所述支撑环顶壁相连。
11.具体地,所述传动机构包括蜗轮和蜗杆,其中,所述蜗轮套设在所述支撑轴上,且所述蜗轮通过连接件与所述支撑轴相连;所述蜗杆的一端与所述箱体内壁可转动相连,所述蜗杆的另一端贯穿所述箱体并与所述驱动装置相连,且所述蜗杆与所述蜗轮相啮合。
12.具体地,上述机械臂安装座还包括多个手柄螺栓,多个所述手柄螺栓环绕所述箱体设置,且多个所述手柄螺栓对称且可转动地设置在所述底座上。
13.本实用新型附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本实用新型的实践了解到。
附图说明
14.本实用新型上述的和/或附加的方面和优点从下面结合附图对实施例的描述中将变得明显和容易理解,其中:
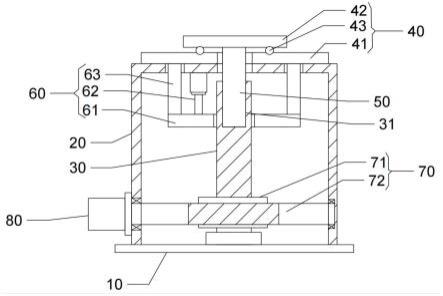
15.图1为根据本实用新型一个实施例的机械臂安装座的结构示意图;以及
16.图2为根据本实用新型另一个实施例的机械臂安装座的结构示意图。
17.如图所示:10、底座;20、箱体;30、支撑轴;31、花键槽;40、支撑组件;41、托盘;42、支撑座;43、滚珠;50、花键轴;60、升降机构;61、支撑环;62、液压缸;63、导向杆;70、传动机构;71、蜗轮;72、蜗杆;80、驱动装置;90、手柄螺栓。
具体实施方式
18.下面详细描述本实用新型的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本实用新型,而不能理解为对本实用新型的限制。相反,本实用新型的实施例包括落入所附加权利要求书的精神和内涵范围内的所有变化、修改和等同物。
19.下面结合附图来描述本实用新型实施例的机械臂安装座。
20.如图1所示,本实用新型实施例的机械臂安装座100,可包括底座10、箱体20、支撑轴30、支撑组件40、花键轴50、升降机构60、传动机构70和驱动装置80。
21.其中,箱体20具有底口,箱体20的底口端可拆卸地设置在底座10上。可以理解的是,该实例中所描述的箱体20的底口端可拆卸地设置在底座10上,便于箱体20的安装和更换。例如,箱体20的底口端可通过螺丝、螺钉或螺栓等连接方式与底座相连。
22.需要说明是,该实施例中所描述的箱体20可为方形或柱形,具体形状可根据应用场景进行设定,在此不做过多赘述。
23.支撑轴30设置在箱体20内,且支撑轴30的一端与底座10活动相连,支撑轴30的另一端延伸至箱体20顶壁下方,其中支撑轴30上开设有花键槽31。应说明的是,该实施例中所描述的支撑轴30通过轴承座(图中未具体标识)固定在底座10上。
24.支撑组件40设置在箱体20的上方,花键轴50的一端与支撑组件40相连,花键轴50的另一端与花键槽31相配合。升降机构60设置在箱体20内,升降机构60分别与支撑组件40和箱体相连。传动机构70设置在箱体20内,且传动机构70的一端与箱体20活动相连,传动机
构70的另一端与支撑轴30相连。驱动装置80的一端与箱体20相连,驱动装置80的另一端与传动机构70相连。
25.需要说明的是,该实施例中所描述的驱动装置可为双向电机。
26.具体地,当需要安装座来控制机械臂时,相关工作人员先将机械臂安装在支撑组件40上,然后工作人员控制双向电机启动,启动的双向电机通过传动机构70带动支撑轴30转动,转动的支撑轴30通过花键轴50带动机械臂往返转动,从而对机械臂的转动角度进行控制。
27.当需要提高机械臂的高度时,相关工作人员可通过控制升降机构60带动支撑组件40上升,上升的支撑组件40从而带动机械臂向上移动,从而实现对机械臂高度的控制,有效提高了安装座的适用性。
28.另外,当需要机械臂转动的同时上下移动,相关工作人员可控制双向电机和升降机构同时工作,实现机械臂转动的同时可上下移动,从而满足机械臂的工作需求。
29.在本实用新型的一个实施例中,如图1所示,支撑组件40可包括托盘41、支撑座42和多个滚珠43。
30.其中,托盘41可活动地设置在箱体20的顶壁上,支撑座42设置在托盘41的上方,且支撑座42的底壁与花键轴50的顶端固定相连。多个滚珠43可滚动地设置在托盘41和支撑座42之间,且多个滚珠43环绕花键轴50设置。
31.需要说明的是,该实施例中所描述的托盘41与支撑座42的相对面上均设有供滚珠滚动的环形槽(图中未示出)。
32.为了清楚的说明上一实施例,本实用新型的一个实施例中,如图1所示,传动机构70可包括蜗轮71和蜗杆72。
33.其中,蜗轮71套设在支撑轴30上,且蜗轮71通过连接件与支撑轴30相连。应说明的是,该实施例中所描述的连接件可为连接键。蜗轮71可通过连接键支撑轴30相连。
34.蜗杆72的一端与箱体20内壁可转动相连,蜗杆72的另一端贯穿箱体20并与驱动装置80相连,且蜗杆72与蜗轮71相啮合。
35.具体地,相关工作人员可通过控制双向电机带动蜗杆72转动,转动的蜗杆72通过与其啮合的蜗轮71带动支撑轴30转动,转动的支撑轴30通过花键轴50带动支撑座42在托盘41上转动,从而通过转动的支撑座42带动机械臂转动。
36.在本实用新型的一个实施例中,如图1所示,升降机构60可包括支撑环61、液压缸62及多个导向杆63。
37.其中,支撑环61套设在支撑轴30上,多个导向杆63环绕支撑轴30设置,例如,多个导向杆63可为3、4、5、6、7、8个等,具体数量在此不做限定,且每个导向杆63的一端与支撑环61顶壁相连,每个导向杆63的另一端贯穿箱体20顶壁并与托盘41底壁相连。
38.液压缸62的一端与箱体20的内腔顶壁相连,液压缸62的另一端与支撑环61顶壁相连。应说明的是,该实施例中所描述的液压缸62伸缩杆在工作之前始终处于伸出的状态。
39.在本实用新型实施例中,箱体的顶壁上开设有供导向杆63移动的导向孔(图中未示出)。另外,为了防止导向杆63与导向孔之间产生硬性磨损,还可在导向孔内安装橡胶圈(图中未示出)。通过设置橡胶圈可防止导向杆63与导向孔之间过度磨损。
40.具体地,当需要控制机械臂向上移动时,相关工作人员可通过控制液压缸62的伸
缩杆缩回,并带动支撑环61沿着支撑轴30向上移动,向上移动的支撑环61通过导向杆63带动托盘41上移,上移的托盘41通过支撑座42带动机械臂上移,从而实现对机械臂高度的控制。与此同时,在支撑座42上移的同时,支撑座42带动花键轴50在花键槽31内上移(支撑座42上移至最高高度时,花键轴50始终与花键槽31相连)。由此可知,工作人员可同时控制双向电机及液压缸62工作,从而实现机械臂在转动的同时,可上下移动,从而可有效提高机械臂安装座的适用性。
41.在本实用新型的另一个实施例中,如图2所示,上述机械臂安装座还可包括多个手柄螺栓90,多个手柄螺栓90环绕箱体20设置,且多个手柄螺栓90对称且可转动地设置在底座10上。例如,多个手柄螺栓可为4个,4个手柄螺栓两两对称设置在箱体的四周。
42.可以理解的是,当底座10放置在不平整的地面上时,工作人员可通过转动手柄螺栓90来调整底座10的平行度及稳定性,从而可有效提高机械臂安装座的适用性。
43.综上,本实用新型实施例的机械臂安装座,可根据机械臂的安装需求或工作要求对安装座进行有效的高度控制,提高适用性。
44.在本说明书的描述中,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本实用新型的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
45.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
46.尽管上面已经示出和描述了本实用新型的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本实用新型的限制,本领域的普通技术人员在本实用新型的范围内可以对上述实施例进行变化、修改、替换和变形。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1