一种基于超声电机的多自由度机械臂的制作方法
1.本实用新型涉及机械臂设备技术领域,尤其是一种基于超声电机的多自由度机械臂。
背景技术:
2.机械臂是高精度机器手,当人们需要精确的控制、频繁一个模式的动作、以及在恶劣环境下的工作时都需要机械臂来完成人们难以操作的工作;多自由度机械臂是指机械臂可以在多个维度空间内活动,可前后运动,可左右运动也可上下运动等;
3.申请号为cn202122818253.8公开的一种机械制造生产加工使用的多自由度机械臂,该装置通过驱动电机带动滚珠丝杠旋转,滚珠丝杠在旋转时通过与推板的啮合带动推板向左运动,从而将橡胶吸附片、支撑管、主连接盒和副连接盒内的空气抽入气罐的内腔中,从而使橡胶吸附片的内腔中产生负压,将工件吸在橡胶吸附片的底端,从而对工件抓取,采用负压吸引的方式对工件进行抓取,在抓取时,只有橡胶吸附片与工件接触,由于橡胶吸附片为橡胶材质,可以有效的避免对工件造成磕碰划伤,提高了工件的加工质量;
4.虽然该装置可以有效的避免对工件造成磕碰划伤,但该装置和现有的多自由度机械臂类似,工作的范围较小,如果是需要随时切换工作位置的工作,就需要将多自由度机械臂从固定位置拆卸下来重装在新的工作位置,操作起来比较麻烦,鉴于此,我们提出一种基于超声电机的多自由度机械臂。
技术实现要素:
5.本实用新型的目的是通过提出一种基于超声电机的多自由度机械臂,以解决上述背景技术中提出的缺陷。
6.本实用新型采用的技术方案如下:
7.提供一种基于超声电机的多自由度机械臂,包括支撑台,所述支撑台的底面四角的位置均固定连接有轮子,前方两个所述轮子之间和后方两个所述轮子之间均设有卡紧装置,所述卡紧装置包括小吊耳和大吊耳,所述小吊耳和所述大吊耳均固定连接于所述支撑台的底面,所述大吊耳的前方设有l形旋转柱,所述l形旋转柱左侧固定连接有u形配重挡块,所述小吊耳的下方设有螺栓,所述螺栓穿过所述l形旋转柱的前后侧壁并伸入所述大吊耳,所述大吊耳上开设有下螺孔和上螺孔,所述螺栓穿过所述l形旋转柱后与所述下螺孔或所述上螺孔螺纹连接,所述螺栓上方设有固定轴,所述固定轴依次穿过所述l形旋转柱的前侧壁、所述小吊耳和所述l形旋转柱的后侧壁并伸入所述大吊耳,所述固定轴与所述l形旋转柱之间转动连接,所述固定轴与所述小吊耳和所述大吊耳之间固定连接,所述l形旋转柱与所述小吊耳之间铰接。
8.作为本实用新型的一种优选技术方案:所述支撑台上方设有旋转底座,所述旋转底座包括上圆盘和下圆盘,所述上圆盘和所述下圆盘之间固定连接,所述下圆盘的下底面安装有第一超声电机,所述上圆盘的顶端开设有圆滑槽,所述圆滑槽内设有转盘,所述转盘
与所述圆滑槽之间转动连接,所述第一超声电机的输出轴可转动地穿过所述上圆盘和所述下圆盘并固定连接于所述转盘的底面中心处。
9.作为本实用新型的一种优选技术方案:所述转盘上方设有第一转臂,所述第一转臂包括两个左右对称的固定板,两个所述固定板之间设有柱臂,右侧所述固定板的右侧壁安装有第二超声电机,所述第二超声电机的输出轴可转动地穿过右侧所述固定板并可转动地伸入左侧所述固定板,且所述第二超声电机穿过所述柱臂的下端并与其固定连接。
10.作为本实用新型的一种优选技术方案:所述第一转臂上方设有第二转臂,所述第二转臂包括两个相同的板臂,左右两个所述板臂位于所述柱臂的顶端的左右两侧,右侧所述板臂的右侧壁的底端安装有第三超声电机,所述第三超声电机的输出轴依次穿过右侧所述板臂和所述柱臂并伸入左侧所述板臂中,所述第三超声电机的输出轴与左右两个所述板臂之间固定连接,所述第三超声电机的输出轴与所述柱臂之间转动连接,所述柱臂与左右两个所述板臂之间铰接。
11.作为本实用新型的一种优选技术方案:右侧所述板臂的右侧壁的顶端安装有第四超声电机,左右两个所述板臂之间设有转动块,所述第四超声电机的输出轴依次穿过右侧所述板臂和所述转动块并伸入左侧所述板臂中,所述第四超声电机的输出轴与左右两个所述板臂之间转动连接,所述第四超声电机的输出轴与所述转动块之间固定连接,所述转动块与左右两个所述板臂之间铰接。
12.作为本实用新型的一种优选技术方案:所述转动块的后方设有抓夹装置,所述抓夹装置包括电动缸,所述电动缸的缸体固定连接于所述转动块的后侧壁上,所述电动缸的活塞杆固定连接有推拉杆,所述推拉杆的上下两杆的末端均固定连接有u形杆。
13.作为本实用新型的一种优选技术方案:上下两个所述u形杆之间设有夹钳,所述夹钳包括若干个钳臂和两个相互对称的抓手,左右两个所述抓手的前侧壁的上下两端均固定连接有钳臂,所述钳臂上开设有直槽。
14.与现有技术相比,本实用新型的有益效果是:
15.本实用新型提供的基于超声电机的多自由度机械臂,通过设有的小吊耳、大吊耳和螺栓等,即将前后两个螺栓分别从前后两个下螺孔中拧出,将前后两个螺栓均向上旋转九十度,前后两个l形旋转柱和前后两个u形配重挡块均向上旋转九十度,将前后两个螺栓分别拧进前后两个上螺孔中,此时四个轮子均处于可转动的状态,即实现轻松移动整个装置;拧松前后两个螺栓,将前后两个螺栓分别从前后两个上螺孔中拧出,将前后两个螺栓均向下旋转九十度,前后两个l形旋转柱和前后两个u形配重挡块均向下旋转九十度,将前后两个螺栓分别拧进前后两个下螺孔中,此时斜对角处的两个轮子被紧紧卡住,使整个装置固定,即可开始工作,该设计使多自由度机械臂的方便移动,且使整个装置在工作位置时十分稳固,保证机械臂工作时的精度。
附图说明
16.图1为本实用新型优选实施例的整体结构示意图之一;
17.图2为本实用新型优选实施例的整体结构示意图之二;
18.图3为本实用新型优选实施例中抓夹装置的结构示意图;
19.图4为本实用新型优选实施例的局部结构示意图。
20.图中各个标记的意义为:
21.1、支撑台;
22.2、旋转底座;21、第一超声电机;22、支撑柱;23、下圆盘;24、上圆盘;241、圆滑槽;25、转盘;
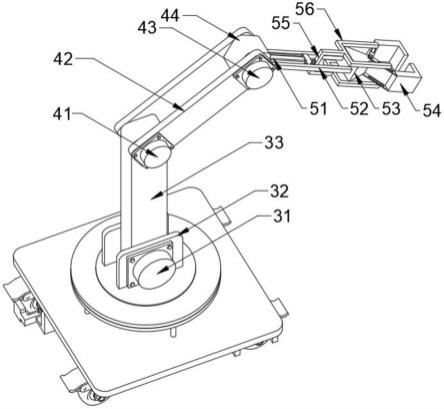
23.3、第一转臂;31、第二超声电机;32、固定板;33、柱臂;
24.4、第二转臂;41、第三超声电机;42、板臂;43、第四超声电机;44、转动块;
25.5、抓夹装置;51、电动缸;52、固定杆;53、固定块;531、滚子;54、夹钳;541、钳臂;5411、直槽;542、抓手;55、推拉杆;56、u形杆;
26.6、轮子;
27.7、卡紧装置;71、小吊耳;72、大吊耳;721、下螺孔;722、上螺孔;73、固定轴;74、螺栓;75、l形旋转柱;76、u形配重挡块。
具体实施方式
28.需要说明的是,在不冲突的情况下,本实施例中的实施例及实施例中的特征可以相互组合,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
29.参照图1-4,本实用新型优选实施例提供了一种基于超声电机的多自由度机械臂,包括支撑台1,支撑台1的底面四角的位置均固定连接有轮子6,前方两个轮子6之间和后方两个轮子6之间均设有卡紧装置7,卡紧装置7包括小吊耳71和大吊耳72,小吊耳71和大吊耳72均固定连接于支撑台1的底面,大吊耳72的前方设有l形旋转柱75,l形旋转柱75左侧固定连接有u形配重挡块76,小吊耳71的下方设有螺栓74,螺栓74穿过l形旋转柱75后与下螺孔721或上螺孔722螺纹连接,螺栓74上方设有固定轴73,固定轴73依次穿过l形旋转柱75的前侧壁、小吊耳71和l形旋转柱75的后侧壁并伸入大吊耳72,固定轴73与l形旋转柱75之间转动连接,固定轴73与小吊耳71和大吊耳72之间固定连接,l形旋转柱75与小吊耳71之间铰接,该设计使整个装置可以轻松移动,且移动至工作位置时可被轻松固定住。
30.支撑台1上方设有旋转底座2,支撑台1与旋转底座2之间固定连接有若干个支撑柱22,旋转底座2包括上圆盘24和下圆盘23,上圆盘24和下圆盘23之间固定连接,下圆盘23的下底面安装有第一超声电机21,上圆盘24的顶端开设有圆滑槽241,圆滑槽241内设有转盘25,转盘25与圆滑槽241之间转动连接,第一超声电机21的输出轴可转动地穿过上圆盘24和下圆盘23并固定连接于转盘25的底面中心处,该设计使多自由度机械臂可以在平面内三百六十度旋转。
31.转盘25上方设有第一转臂3,第一转臂3包括两个左右对称的固定板32,两个固定板32之间设有柱臂33,右侧固定板32的右侧壁安装有第二超声电机31,第二超声电机31的输出轴可转动地穿过右侧固定板32并可转动地伸入左侧固定板32,且第二超声电机31穿过柱臂33的下端并与其固定连接,该设计保证第一转臂3可前后转动。
32.第一转臂3上方设有第二转臂4,第二转臂4包括两个相同的板臂42,左右两个板臂42位于柱臂33的顶端的左右两侧,右侧板臂42的右侧壁的底端安装有第三超声电机41,第
三超声电机41的输出轴依次穿过右侧板臂42和柱臂33并伸入左侧板臂42中,第三超声电机41的输出轴与左右两个板臂42之间固定连接,第三超声电机41的输出轴与柱臂33之间转动连接,柱臂33与左右两个板臂42之间铰接,该设计使第二转臂4可前后转动。
33.右侧板臂42的右侧壁的顶端安装有第四超声电机43,左右两个板臂42之间设有转动块44,第四超声电机43的输出轴依次穿过右侧板臂42和转动块44并伸入左侧板臂42中,第四超声电机43的输出轴与左右两个板臂42之间转动连接,第四超声电机43的输出轴与转动块44之间固定连接,转动块44与左右两个板臂42之间铰接,该设计保证抓夹装置5可以上下转动。
34.转动块44的后方设有抓夹装置5,抓夹装置5包括电动缸51,电动缸51的缸体固定连接于转动块44的后侧壁上,电动缸51的活塞杆固定连接有推拉杆55,推拉杆55的上下两杆的末端均固定连接有u形杆56,上下两个u形杆56之间设有夹钳54,夹钳54包括若干个钳臂541和两个相互对称的抓手542,左右两个抓手542的前侧壁的上下两端均固定连接有钳臂541,钳臂541上开设有直槽5411,上下两个u形杆56的两杆的内侧壁上均固定连接有滚子531,上方两个滚子531分别伸入上方两个直槽5411内并分别与上方两个直槽5411之间滑动连接,下方两个滚子531分别伸入下方两个直槽5411内并分别与下方两个直槽5411之间滑动连接,电动缸51左右两侧均设有固定杆52,两个固定杆52的前侧壁固定连接于转动块44的后侧壁上,两个固定杆52的后侧壁固定连接有固定块53,固定块53的上下侧壁上均固定连接有滚子531,上方滚子531依次穿过右侧上方钳臂541和左侧上方钳臂541,下方滚子531依次穿过右侧下方钳臂541和左侧下方钳臂541,该设计可稳固地夹住物体。
35.本实施例的基于超声电机的多自由度机械臂,使用人员将前后两个螺栓74分别从前后两个下螺孔721中拧出,将前后两个螺栓74均向上旋转九十度,前后两个l形旋转柱75和前后两个u形配重挡块76均向上旋转九十度,将前后两个螺栓74分别拧进前后两个上螺孔722中,此时四个轮子6均处于可转动的状态,即实现轻松移动整个装置;拧松前后两个螺栓74,将前后两个螺栓74分别从前后两个上螺孔722中拧出,将前后两个螺栓74均向下旋转九十度,前后两个l形旋转柱75和前后两个u形配重挡块76均向下旋转九十度,将前后两个螺栓74分别拧进前后两个下螺孔721中,此时斜对角处的两个轮子6被紧紧卡住,使整个装置固定,即可开始工作;启动第一超声电机21,第一超声电机21的输出轴转动带动转盘25 旋转,将整个机械臂转至需要的位置后关闭第一超声电机21,启动第二超声电机31,第二超声电机31的输出轴转动带动第一转臂3向前或向后转动,将第一转臂3的顶端转至需要的高度后关闭第二超声电机31,启动第三超声电机41,第三超声电机41的输出轴转动带动第二转臂4向前或向后转动,将第二转臂4的顶端转至需要的高度后关闭第三超声电机41,启动第四超声电机43,第四超声电机43的输出轴转动带动抓夹装置5向上或向下转动,将抓夹装置5转至需要的位置后关闭第四超声电机43,启动电动缸51,电动缸51的活塞杆推动推拉杆55和u形杆56移动,u形杆56上的若干个滚子531在直槽5411中滑动,推动两个抓手542相互靠近,直至夹住物体,关闭电动缸51,即完成作业。
36.对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含
义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
37.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1