机器人外挂电批组件的制作方法
1.本实用新型涉及变位机传动设备领域,更具体涉及一种机器人外挂电批组件。
背景技术:
2.生产制造业正由传统的人工密集型向智能制造转变。智能制造利用互联网技术、自动控制技术、机械手、智能机器人技术实现无人化高精度、高效率的生产装配。
3.传统的电批只能作一次旋动。当遇到螺杆上螺接螺母,但需要先旋紧螺杆后再旋紧螺母的工况时,传统电批只能分两步操作,即批头先套在螺杆端部旋,再卸下电批更换批头后套在螺母上旋,步骤繁琐,效率低下。本实用新型涉及一种机器人外挂电批结构,属于机器人使用电批的技术领域。传统的锁螺丝设备,多使用人工手持电批进行拧螺栓,费时费力,且效率低下。
4.鉴于现有技术的不足,本实用新型提出一种机器人外挂电批结构,该实用新型与机器人直接连接,机器人带着本实用新型结构在视觉的引导下,实现高速、高效拧螺栓。
技术实现要素:
5.为了解决上述问题,本实用新型的目的在于提供了一种结构简单、外挂范围广、实现高速、高效拧螺栓的机器人外挂电批组件。
6.根据本实用新型的一个方面,提供了机器人外挂电批组件,包括:电机、减速机、安装部、移动组件和批头组件,安装部包括连接法兰、转接法兰和固定座,连接法兰的顶部固定连接转接法兰,固定座垂直固定在转接法兰的底部,电机的输出端连接减速机,减速机安装在转接法兰上,移动组件设置在固定部上,批头组件安装在移动组件上,批头组件的末端连接减速机的输出端,移动组件的外侧设有防尘罩。
7.在一些实施方式中,移动组件包括:线轨、第一滑块、第二滑块、第一连接块、第二连接块和复位部,第一滑块和第二滑块套设在线轨上,第一滑块的顶部固定第一连接块,第二滑块的顶部固定第二连接块,复位部平行设置线轨的一侧且所述复位部的一端固定第一连接块,复位部的另一端固定第二连接块。
8.在一些实施方式中,复位部包括:第一连接螺杆、弹簧导杆、限位弹簧和第二连接螺杆,第一连接螺杆与第一连接块固定连接,第二连接螺杆与第二连接块固定连接,弹簧导杆的一端设置在第一连接螺杆上,弹簧导杆的另一端设置在第二连接螺杆上,限位弹簧套设置弹簧导杆的外壁且被限定在第一连接螺杆和第二连接螺杆之间。
9.在一些实施方式中,批头组件包括转换接头、批头、第一轴承座和第二轴承座,第一轴承座安装在第一连接块上,第二轴承座安装在第二连接块上,转换接头连接减速机的输出端,转换接头通过轴承安装在第一轴承座上,批头的后端与转换接头插接,批头的前端延伸出防尘罩,批头通过轴承安装在第二轴承座上。
10.在一些实施方式中,电机为伺服电机。
11.本实用新型与现有技术相比具有外挂范围广、实现高速、高效拧螺栓的有益效果;
通过连接法兰便于与机器人进行连接,适用范围更加广;利用移动组件和批头组件便于实现快速高效的安装,且利用复位部提供复位和弹性连接。
附图说明
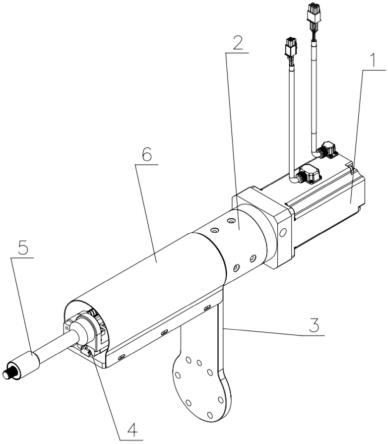
12.图1是本实用新型机器人外挂电批组件的结构示意图;
13.图2是本实用新型机器人外挂电批组件的剖视图;
14.图3是本实用新型机器人外挂电批组件的移动组件和批头组件的结构示意图。
具体实施方式
15.下面结合附图所示的各实施方式对本实用新型进行详细说明,但应当说明的是,这些实施方式并非对本实用新型的限制,本领域普通技术人员根据这些实施方式所作的功能、方法或者结构上的等效变换或替代,均属于本实用新型的保护范围之内。
16.在本实用新型的描述中,需要说明的是,除非另有规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是机械连接或电连接,也可以是两个元件内部的连通,可以是直接相连,也可以通过中间媒介间接相连,对于本领域的普通技术人员而言,可以根据具体情况理解所述术语的具体含义。
17.如图1和图2所示,本实用新型所述的机器人外挂电批组件,包括:电机1、减速机2、安装部3、移动组件4和批头组件5,安装部3包括连接法兰31、转接法兰32和固定座33,连接法兰31的顶部固定连接转接法兰32,固定座33垂直固定在转接法兰32的底部,电机1的输出端连接减速机2,减速机2安装在转接法兰32上,移动组件4设置在固定部上,批头组件5安装在移动组件4上,批头组件5的末端连接减速机2的输出端,移动组件4的外侧设有防尘罩6。通过连接法兰31便于与机器人进行连接,适用范围更加广;利用移动组件4和批头组件5便于实现快速高效的安装,且利用复位部7提供复位和弹性连接。
18.如图3所示,移动组件4包括:线轨41、第一滑块42、第二滑块43、第一连接块44、第二连接块45和复位部7,第一滑块42和第二滑块43套设在线轨41上,第一滑块42的顶部固定第一连接块44,第二滑块43的顶部固定第二连接块45,复位部7平行设置线轨41的一侧且所述复位部7的一端固定第一连接块44,复位部7的另一端固定第二连接块45。通过第一滑块42和第二滑块43在线轨41上移动进而实现转换接头51与批头52之间相互移动,便于实现降低冲击。
19.复位部7包括:第一连接螺杆71、弹簧导杆72、限位弹簧73和第二连接螺杆74,第一连接螺杆71与第一连接块44固定连接,第二连接螺杆74与第二连接块45固定连接,弹簧导杆72的一端设置在第一连接螺杆71上,弹簧导杆72的另一端设置在第二连接螺杆74上,限位弹簧73套设置弹簧导杆72的外壁且被限定在第一连接螺杆71和第二连接螺杆74之间。在实施的过程中通过限位弹簧73将第一滑块42和第二滑块43支撑到线轨41的两端,在批头52旋转螺丝时通过限位弹簧73吸收冲击,在完成螺丝旋转过程后,限位弹簧73将第一连接螺杆71和第二连接螺杆74推回初始位置。在加工过程中第一连接螺杆71和第二连接螺杆74上均设有安装孔,弹簧导杆72的两端具有限位块且设置在安装块的外侧。限位弹簧73支撑第一连接螺杆71和第二连接螺杆74,在旋转时利用限位弹簧73吸收冲击。
20.批头组件5包括转换接头51、批头52、第一轴承座53和第二轴承座54,第一轴承座
53安装在第一连接块44上,第二轴承座54安装在第二连接块45上,转换接头51连接减速机2的输出端,转换接头51通过轴承安装在第一轴承座53上,批头52的后端与转换接头51插接,批头52的前端延伸出防尘罩6,批头52通过轴承安装在第二轴承座54上。通过第一轴承座53和第二轴承座54便于使转换接头51和批头52旋转更加顺畅,同时转换接头51的前端具有连接孔,连接孔的形状与批头52后端的形状一致,最优为六角形。同时批头52的后端能够沿连接孔的轴向移动。
21.电机1为伺服电机1。利用电机1驱动减速机2进的实现批头52的旋转,实现高速高效旋紧或者松开螺栓螺母。
22.以上所述的仅是本实用新型的一些实施方式,应当指出,对于本领域的普通技术人员来说,在不脱离本实用新型的创造构思的前提下,还可以做出其它变形和改进,这些都属于本实用新型的保护范围。
技术特征:
1.机器人外挂电批组件,其特征在于,包括:电机、减速机、安装部、移动组件和批头组件,所述安装部包括连接法兰、转接法兰和固定座,所述连接法兰的顶部固定连接转接法兰,所述固定座垂直固定在转接法兰的底部,所述电机的输出端连接减速机,所述减速机安装在转接法兰上,所述移动组件设置在固定部上,所述批头组件安装在移动组件上,所述批头组件的末端连接减速机的输出端,所述移动组件的外侧设有防尘罩。2.根据权利要求1所述的机器人外挂电批组件,其特征在于,所述移动组件包括:线轨、第一滑块、第二滑块、第一连接块、第二连接块和复位部,所述第一滑块和第二滑块套设在线轨上,所述第一滑块的顶部固定第一连接块,所述第二滑块的顶部固定第二连接块,所述复位部平行设置线轨的一侧且所述复位部的一端固定第一连接块,所述复位部的另一端固定第二连接块。3.根据权利要求2所述的机器人外挂电批组件,其特征在于,所述复位部包括:第一连接螺杆、弹簧导杆、限位弹簧和第二连接螺杆,所述第一连接螺杆与第一连接块固定连接,所述第二连接螺杆与第二连接块固定连接,所述弹簧导杆的一端设置在第一连接螺杆上,所述弹簧导杆的另一端设置在第二连接螺杆上,所述限位弹簧套设置弹簧导杆的外壁且被限定在第一连接螺杆和第二连接螺杆之间。4.根据权利要求3所述的机器人外挂电批组件,其特征在于,所述批头组件包括转换接头、批头、第一轴承座和第二轴承座,所述第一轴承座安装在第一连接块上,所述第二轴承座安装在第二连接块上,所述转换接头连接减速机的输出端,所述转换接头通过轴承安装在第一轴承座上,所述批头的后端与转换接头插接,所述批头的前端延伸出防尘罩,所述批头通过轴承安装在第二轴承座上。5.根据权利要求1所述的机器人外挂电批组件,其特征在于,所述电机为伺服电机。
技术总结
本实用新型公开了一种机器人外挂电批组件,包括:电机、减速机、安装部、移动组件和批头组件,安装部包括连接法兰、转接法兰和固定座,连接法兰的顶部固定连接转接法兰,固定座垂直固定在转接法兰的底部,电机的输出端连接减速机,减速机安装在转接法兰上,移动组件设置在固定部上,批头组件安装在移动组件上,批头组件的末端连接减速机的输出端,移动组件的外侧设有防尘罩,本实用新型提供了一种外挂范围广、实现高速、高效拧螺栓的机器人外挂电批组件。件。件。
技术研发人员:吕航 吕跃罡 王月阳 张碧波
受保护的技术使用者:南京黎创智能装备有限公司
技术研发日:2022.08.04
技术公布日:2023/1/13
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1