一种用于绘画机器人的角度调节机构的制作方法
1.本实用新型涉及绘画机器人领域,特别涉及一种用于绘画机器人的角度调节机构。
背景技术:
2.机器人是自动控制机器的俗称,在当代工业中,机器人指能自动执行任务的人造机器装置,用以取代或协助人类工作,目前科学界正在向此方向研究开发,现有的机器人多种多样,大多都是应用于工业生产中,减轻工人的工作负担,提高工作效率,而在绘画行业中,很少有代替人工绘画的机器。
3.其中cn209987681u公开了一种用于绘画机器人的角度调节机构,包括筒柱、连接板和夹笔头,筒柱的内部固定安装有伸缩气缸,伸缩气缸的输出端穿过筒柱的顶端并固定连接有半圆块,半圆块的一端与连接板固定连接,连接板的中部通过穿插连接有的旋转轴与筒柱活动连接,连接板的一端与夹笔头活动连接,连接板底端的一侧螺纹连接有电机罩,电机罩的内部滑动连接有旋转电机,与现有技术相比,本实用新型的有益效果是设有的旋转电机和夹笔头,通过旋转电机的转动,带动夹笔头在水平面内转动,使得画笔可以在xy平面内进行运动,便于画笔更好绘制图画,设有的伸缩气缸和旋转轴,便于夹笔头和画笔能够在空间平面内翻转,避免更好地寻找绘画的起始点。
4.但是仍存在问题,只能对设备进行旋转调节,不能进行更复杂的角度哈高度调节,在使用中存在一定的局限性。
技术实现要素:
5.本实用新型的目的是提供种一种用于绘画机器人的角度调节机构,通过设置左右驱动装置、高度调节装置和角度调节装置,实现对绘画机器人进行多方位的和角度的调节,能够适应用户不同的需求,方便推广。
6.为了达到上述实用新型目的,本实用新型采用的技术方案为:
7.一种用于绘画机器人的角度调节机构,包括底座,所述底座上面固定设有左右驱动装置,所述左右驱动装置上面固定设有高度调节装置,所述高度调节装置上面固定设有角度调节装置;
8.所述左右驱动装置包括固定设置在底座内壁上的滑轨、固定设置在底座一侧的托板和固定设置在底座上面的固定板,所述托板上面固定设有驱动电机一,所述驱动电机一输出端上固定设有螺纹杆一,所述螺纹杆一远离驱动电机一输出端的一端转动设置在固定板上,所述螺纹杆一上面螺纹连接有丝杠螺母副一,所述滑轨内滑动设有滑块,所述滑块上面对称设有连接杆一和连接杆二,所述滑轨上面设有条状通孔一,所述连接杆一和连接杆二远离滑块的一端穿过条状通孔一且与丝杠螺母副一固定连接;
9.所述高度调节装置包括固定设置在丝杠螺母副一上面的驱动箱,所述驱动箱上端面设有条状通孔二,所述驱动箱底部固定设有双轴驱动电机和固定设置在驱动箱上面的伸
缩杆,所述双轴驱动电机两个输出端上分别固定设有螺纹杆二和螺纹杆三,所述螺纹杆二和螺纹杆三远离双轴驱动电机输出端的一端转动设置在驱动箱内壁上,所述螺纹杆二和螺纹杆三上面螺纹连接有丝杆螺母副二,所述丝杆螺母副二上面固定设有连接块一,所述连接块一上活动设有提升杆,所述伸缩杆远离驱动箱的一端固定设有支撑箱,所述伸缩杆两侧且在支撑箱下面对称设有连接块二和连接块三,所述提升杆远离连接块一的一端穿过条状通孔二且活动连接在连接块二和连接块三上。
10.进一步的,所述角度调节装置包括固定设置在支撑箱内的驱动电机二,所述驱动电机二输出端上固定设有转动板,所述转动板上面固定设有角度调节电机,所述角度调节电机输出端上固定设有调节臂,所述调节臂远离角度调节电机输出端的一端固定设有夹持装置。
11.进一步的,所述夹持装置包括固定设置在调节臂远离角度调节电机一端的夹持槽和固定设置在调节臂上面的夹持箱,所述,所述夹持箱内插接有夹持杆,所述夹持杆一端穿过调节臂固定设有夹持板一,所述夹持杆远离夹持板一的一端固定设有拉环,所述夹持箱内且在夹持杆上套设有夹持弹簧一,所述夹持槽内壁上固定设有多个排列均匀的夹持弹簧二,所述夹持弹簧二远离夹持槽的一端固定设有夹持板二。
12.进一步的,所述驱动电机一、驱动电机二和双轴驱动电机为可逆转电机。
13.进一步的,所述角度调节电机为伺服电机。
14.作为改进,本实用新型的有益效果为:
15.本实用新型的一种用于绘画机器人的角度调节机构,当设备在工作时,首先通过驱动电机一的转动,进而带动螺纹杆一的转动,进而实现丝杠螺母副一在螺纹杆一上左右移动,然后通过双轴驱动电机的转动,进而带动螺纹杆二和螺纹杆三的转动,进而带动丝杆螺母副二在螺纹杆二和螺纹杆三左右运动,进而带动提升杆的运动,进而实现支撑箱的上升与下降,然后通过驱动电机二的转动,进而实现转动板的旋转,然后通过角度调节电机的转动,进而实现调节臂角度的调节,最终实现绘画机器人能够进行多方位的和角度的调节,能够适应用户不同的需求。
附图说明
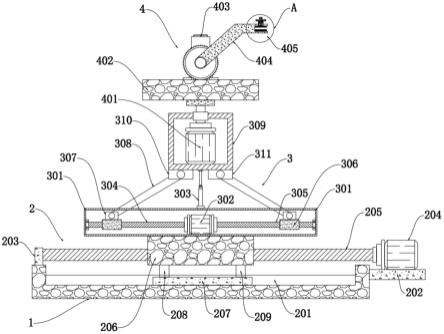
16.图1为本实用新型的一种用于绘画机器人的角度调节机构整体结构示意图;
17.图2为本实用新型图1中的a处放大图;
18.附图标记对照表:
19.1、底座;2、左右驱动装置;201、滑轨;202、托板;203、固定板;204、驱动电机一;205、螺纹杆一;206、丝杠螺母副一;207、滑块;208、连接杆一;209、连接杆二;3、高度调节装置;301、驱动箱;302、双轴驱动电机;303、伸缩杆;304、螺纹杆二;305、螺纹杆三;306、丝杆螺母副二;307、连接块一;308、提升杆;309、支撑箱;310、连接块二;311、连接块三;4、角度调节装置;401、驱动电机二;402、转动板;403、角度调节电机;404、调节臂;405、夹持装置;4051、夹持槽;4052、夹持箱;4053、夹持杆;4054、夹持板一;4055、拉环;4056、夹持弹簧一;4057、夹持弹簧二;4058、夹持板二。
具体实施方式
20.下面结合附图来进一步说明本实用新型的具体实施方式。其中相同的零部件用相同的附图标记表示。需要说明的是,下面描述中使用的词语“前”、“后”、“左”、“右”、“上”和“下”指的是附图中的方向,词语“内”和“外”分别指的是朝向或远离特定部件几何中心的方向。
21.为了使本实用新型的内容更容易被清楚地理解,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。其中相同的零部件用相同的附图标记表示。
22.一种用于绘画机器人的角度调节机构,包括底座1,底座1上面固定设有左右驱动装置2,左右驱动装置2上面固定设有高度调节装置3,高度调节装置3上面固定设有角度调节装置4。
23.左右驱动装置2包括固定设置在底座1内壁上的滑轨201、固定设置在底座1一侧的托板202和固定设置在底座1上面的固定板203,托板202上面固定设有驱动电机一204,驱动电机一204输出端上固定设有螺纹杆一205,螺纹杆一205远离驱动电机一204输出端的一端转动设置在固定板203上,螺纹杆一205上面螺纹连接有丝杠螺母副一206,滑轨201内滑动设有滑块207,滑块207上面对称设有连接杆一208和连接杆二209,滑轨201上面设有条状通孔一,连接杆一208和连接杆二209远离滑块207的一端穿过条状通孔一且与丝杠螺母副一206固定连接,通过驱动电机一204的转动,进而带动螺纹杆一205的转动,进而实现丝杠螺母副一206在螺纹杆一205上左右移动,进而实现设备的左右运动。
24.高度调节装置3包括固定设置在丝杠螺母副一206上面的驱动箱301,驱动箱301上端面设有条状通孔二,驱动箱301底部固定设有双轴驱动电机302和固定设置在驱动箱301上面的伸缩杆303,双轴驱动电机302两个输出端上分别固定设有螺纹杆二304和螺纹杆三305,螺纹杆二304和螺纹杆三305远离双轴驱动电机302输出端的一端转动设置在驱动箱301内壁上,螺纹杆二304和螺纹杆三305上面螺纹连接有丝杆螺母副二306,丝杆螺母副二306上面固定设有连接块一307,连接块一307上活动设有提升杆308,伸缩杆303远离驱动箱301的一端固定设有支撑箱309,伸缩杆303两侧且在支撑箱309下面对称设有连接块二310和连接块三311,提升杆308远离连接块一307的一端穿过条状通孔二且活动连接在连接块二310和连接块三311上,驱动电机一204、驱动电机二401和双轴驱动电机302为可逆转电机,然后通过双轴驱动电机302的转动,进而带动螺纹杆二304和螺纹杆三305的转动,进而带动丝杆螺母副二306在螺纹杆二304和螺纹杆三305左右运动,进而带动提升杆308的运动,进而实现支撑箱309的上升与下降。
25.角度调节装置4包括固定设置在支撑箱309内的驱动电机二401,驱动电机二401输出端上固定设有转动板402,转动板402上面固定设有角度调节电机403,角度调节电机403为伺服电机,角度调节电机403输出端上固定设有调节臂404,调节臂404远离角度调节电机403输出端的一端固定设有夹持装置405,夹持装置405包括固定设置在调节臂404远离角度调节电机403一端的夹持槽4051和固定设置在调节臂404上面的夹持箱4052,夹持箱4052内插接有夹持杆4053,夹持杆4053一端穿过调节臂404固定设有夹持板一4054,夹持杆4053远离夹持板一4054的一端固定设有拉环4055,夹持箱4052内且在夹持杆4053上套设有夹持弹簧一4056,夹持槽4051内壁上固定设有多个排列均匀的夹持弹簧二4057,夹持弹簧二4057
远离夹持槽4051的一端固定设有夹持板二4058,通过驱动电机二401的转动,进而实现转动板402的旋转,然后通过角度调节电机403的转动,进而实现调节臂404角度的调节,最终实现绘画机器人能够进行多方位的和角度的调节,能够适应用户不同的需求。
26.以上所述仅为本实用新型专利的较佳实施例而已,并不用以限制本实用新型专利,凡在本实用新型专利的精神和原则之内所做的任何修改、等同替换和改进等,均应包含在本实用新型专利的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1